Elastyczne rozwiązania robotyczne
| TechnikaDynamiczny rozwój rynku oraz technologii wpływa na wzrost zapotrzebowania na różnorodne towary, lecz również na wzrost wymagań dotyczących jakości czy czasu realizacji. Jednym ze sposobów na poprawę tych wskaźników jest automatyzacja i robotyzacja procesów produkcyjnych. Analiza procesów produkcyjnych i funkcjonowania przedsiębiorstwa pozwala dobrać optymalne rozwiązanie dla danej firmy.


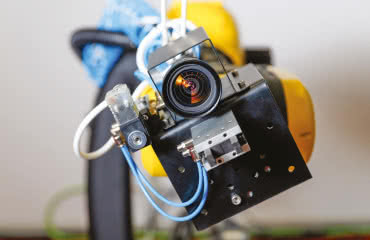
Fot. 1. Robot kartezjański czteroosiowy
Jednym z konfigurowalnych i korzystnych budżetowo rozwiązań są roboty kartezjańskie. Stanowią one popularne rozwiązanie do przenoszenia różnorodnych materiałów na liniach produkcyjnych, są również wykorzystywane w pakowaniu, dozowaniu, transporcie detali lub ładunków. Firma WObit proponuje roboty charakteryzujące się modułową budową. Dzięki zastosowaniu standardowych modułów liniowych MLA, MLAS, MLAS16 oraz MLA2P jako podstawy konstrukcji, oferuje duże możliwości tworzenia funkcjonalnych i atrakcyjnych cenowo układów mechatronicznych.
WObit proponuje trzy standardowe rozwiązania robotów kartezjańskich. Są to roboty ekonomiczne, precyzyjne oraz wersja o wysokiej dynamice. Klasa robotów ekonomicznych bazuje na standardowych modułach liniowych MLA, oferujących zakres ruchu w jednej osi do 2500 mm (do 2800 mm w przypadku zastosowania modułów MLA2P) i precyzję pozycjonowania do 0,1 mm. Jako napęd może być zastosowany silnik krokowy, silnik DC oraz serwonapęd, które pozwalają uzyskać maksymalną prędkość przesuwu do 1 m/s.
Fot. 2. Moduł liniowy MLAS16
W aplikacjach wymagających wyższej precyzji - do 0,01 mm, gdzie zachodzi również potrzeba przenoszenia większych obciążeń dostępne są roboty, których konstrukcja bazuje na modułach MLAS, bądź MLAS16, gdzie napęd jest przenoszony przez śrubę kulową. Maksymalny zakres ruchu w jednej osi wynosi 1000 mm, prędkość posuwu wynosi do 0,8 m/s, natomiast maksymalny udźwig do 100 kg. W aplikacjach wymagających największej dynamiki i powtarzalności pozycjonowania niezbędna jest odpowiednia konstrukcja.
Do takich zastosowań WObit proponuje implementację robotów o wysokiej dynamice, których budowa bazuje na silnikach liniowych ServoTube. Napędy te charakteryzują się przyspieszeniem do 586 m/s² , prędkością do 9,3 m/s oraz powtarzalnością do 0,012 mm. Zakres ruchu w jednej osi wynosi do 1323 mm. Innym rozwiązaniem jest wykorzystanie silników liniowych z nieżelaznym rdzeniem o modułowej konstrukcji, pozwalających na budowę układów o niemal nieograniczonym zakresie ruchu.

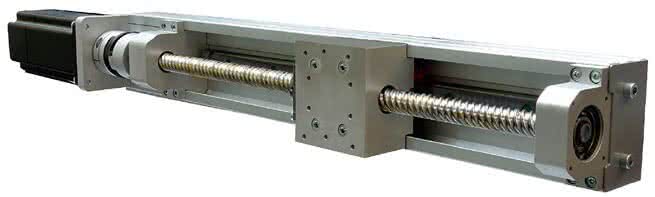
Fot. 3. Moduł liniowy MLA2P
W aplikacjach wymagających dużego zakresu roboczego oraz dużej sztywności używany jest wspomniany wcześniej moduł MLA2P. Przykładem realizacji takiego układu jest czteroosiowa konstrukcja, która została przygotowana do aplikacji dozowania. Wykonany robot umożliwia swobodną manipulację obiektami o masie do 5 kg w zakresie roboczym 2200 mm dla osi X,Y oraz 100 mm w osi Z. W ramach osi X,Y oraz Z realizowany jest ruch liniowy, natomiast ostatnia oś R wykonuje ruch obrotowy.
Oś obrotowa w omawianym przykładzie została przygotowana do doposażenia w odpowiedni element wykonawczy jak dysza lub głowica. Podstawę konstrukcji stanowią stalowe profile, zapewniając odpowiednią sztywność i solidne mocowanie do podłoża. Osie poziome wykonane zostały z dwóch równoległych modułów MLA2P napędzanych jednym serwonapędem z przekładnią planetarną, co uniemożliwiło blokowanie się układu z powodu przekoszenia, a także zapewniło odpowiednią dynamikę całego układu.
W osi pionowej został wykorzystany moduł liniowy MLAS, który do przeniesienia napędu wykorzystuje śrubę kulową z nakrętką. Jej zastosowanie gwarantuje szybki i precyzyjny ruch oraz długą żywotność. Do zabezpieczenia układu zastosowany został silnik serwo z hamulcem, który uniemożliwia samoczynne opadnięcie wózka w przypadku utraty zasilania.
STEROWANIE ROBOTÓW KARTEZJAŃSKICH

Fot. 4. Kontroler trajektorii MIC488
Funkcjonalny i łatwy w programowaniu kontroler to istotny element składowy robota. WObit do układów kartezjańskich proponuje czteroosiowy kontroler trajektorii MIC488, umożliwiający sterowanie do czterech napędów krokowych lub serwonapędów w trybie krok/kierunek. MIC488 pozwala także na podłączenie enkoderów inkrementalnych do nadrzędnej kontroli pozycji.
Poza uniwersalnymi wejściami/wyjściami cyfrowymi oraz dwoma wejściami analogowymi 0 - 10 V kontroler wyposażony jest w porty komunikacyjne (RS232/RS485) pracujące w protokole Modbus (master/slave) służące do komunikacji np. z panelem operatorskim HMI. Kontrola ruchu robota jest prosta dzięki dedykowanemu, intuicyjnemu oprogramowaniu, które pozwala na konfigurację ruchu napędów oraz tworzenie programów sterujących napędami, wyjściami, a także reagowanie na stany wejść lub wartości zmiennych komunikacyjnych.
Poza robotami kartezjańskimi WObit oferuje roboty SCARA, roboty Tower, roboty Desktop oraz rodzinę robotów AGV przeznaczonych do autonomicznego transportu towarów. Roboty oferowane przez WObit mogą zostać doposażone w odpowiedni chwytak do manipulacji elementami. Zwiększa to funkcjonalność i łatwość dostosowywania robotów do realizacji innego procesu lub przenoszenia obiektów o innych wymiarach. Więcej informacji o robotach i aplikacjach można znaleźć na stronie www.wobit.com.pl oraz dzwoniąc pod numer 61 222 74 22.
P.P.H. WObit E.K.J. Ober s.c.
www.wobit.com.pl