Strojenie PID - metody doboru nastaw Część 2
| TechnikaWiele ze stosowanych dzisiaj urządzeń automatyki przemysłowej, takich jak sterowniki programowalne czy przemienniki częstotliwości, jest wyposażonych w funkcję regulacji sygnału wyjściowego za pomocą regulatorów PID. W pierwszej części artykułu przedstawione zostały podstawy teoretyczne regulacji oraz doboru nastaw - poniżej omawiamy zagadnienia praktyczne, w szczególności związane z wyborem najkorzystniejszych metod strojenia regulatorów.

TEORIA A PRAKTYKA
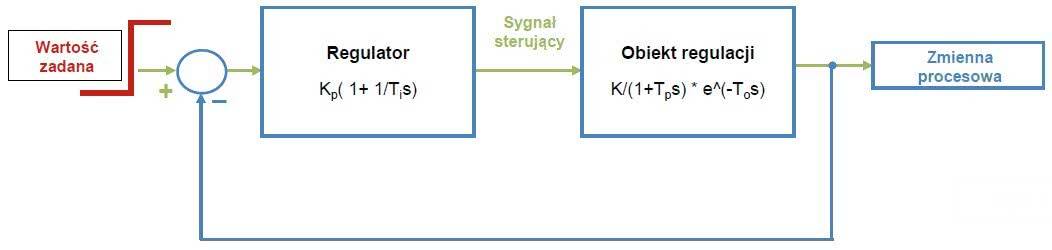
Rys. 1.
Przybliżone metody nastaw regulatorów PID są oparte na pewnych wyidealizowanych założeniach. Zadaniem projektanta jest oszacowanie, która z metod jest najbardziej miarodajna ze względu na istniejące uwarunkowania i charakterystykę badanego obiektu. W praktycznym zastosowaniu metod doboru nastaw należy wziąć pod uwagę pewne czynniki, które są powodem różnic pomiędzy przyjętym modelem a rzeczywistym zachowaniem układu regulacji.
Do wyznaczenia charakterystyki skokowej przyjmuje się, że na wejście podawany jest sygnał skokowy. W rzeczywistości może okazać się, że wymuszenie musi narastać po pewnym zboczu, a stromość tego zbocza ma znaczący wpływ na dokładność wyznaczanej charakterystyki. Przykładem są silniki elektryczne zasilane przez falowniki, których ze względu na warunki rozruchu nie można od razu zasilać prądem o nominalnym napięciu i częstotliwości.
Kolejnym czynnikiem oddziałującym na wyznaczaną doświadczalnie charakterystykę są różnego rodzaju zakłócenia wpływające na przebieg regulowanego procesu. Za przykład może posłużyć trójdrogowy zawór mieszający mający utrzymywać zadaną wartość temperatury cieczy za zaworem. Nagłe zaburzenia natężenia przepływu i wahania temperatury spowodowane przez pozostałe elementy układu są powodem przekłamań w wykreślanej charakterystyce. Idealną sytuacją byłoby wyeliminowanie wszelkich zakłóceń, jednak w warunkach rzeczywistego procesu często jest to niemożliwe.
PRZYKŁADY ZASTOSOWANIA
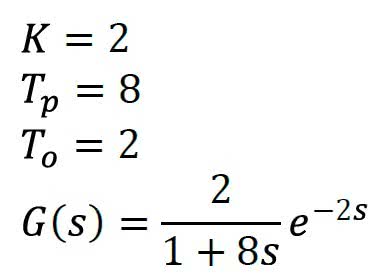
Aby zobrazować praktyczne działanie opisywanych w pierwszej części metod, przeprowadzono symulację przebiegów odpowiedzi układu regulacji, którego model przedstawiony jest na rysunku 1. Wykorzystano obiekt inercyjny pierwszego rzędu z opóźnieniem transportowym o następującej transmitancji:
 |
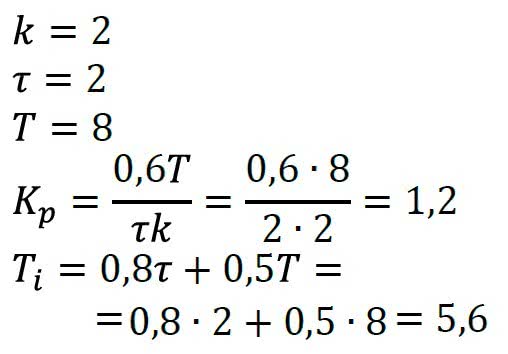
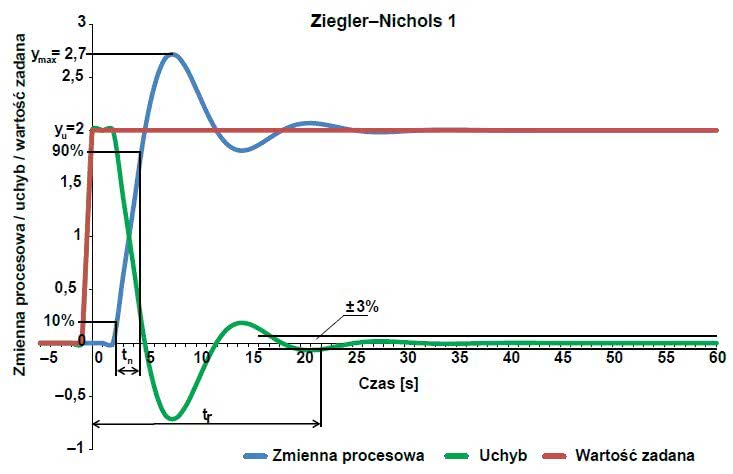
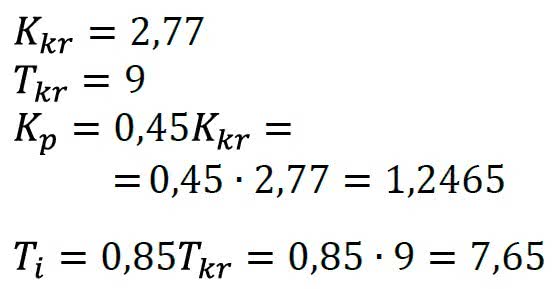
Korzystając z podanych wcześniej procedur, obliczono cztery zestawy parametrów regulatora PI dla symulowanego obiektu regulacji. Regulator PI został wybrany ze względu na jego najczęstsze występowanie w aplikacjach przemysłowych oraz dlatego, że pozwala na osiągnięcie uchybu ustalonego równego zero. Dla metody Zieglera-Nicholsa opartej na badaniu charakterystyki skokowej i przy założeniu minimalizacji czasu ustalania (tr) oraz zerowego współczynnika zanikania (?) obliczenia wyglądają następująco:
T, ? i k odczytano z rysunku 1 w pierwszej części artykułu.
 |
Rys. 2.
Po przeprowadzeniu symulacji z regulatorem wykorzystującym obliczone nastawy, uzyskano przebieg odpowiedzi skokowej, który zobrazowano na rysunku 2. Dla lepszego porównania wyników symulacji zastosowania różnych metod wyznaczono kilka parametrów charakteryzujących jakość regulacji i umieszczono je w tabeli na kolejnej stronie.
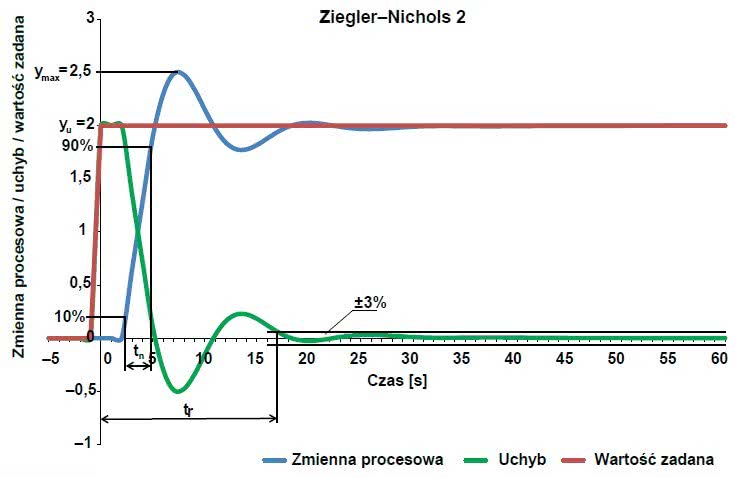
Kolejną symulację przeprowadzono, wykorzystując metodę Zieglera-Nicholsa opartą na wyznaczanym doświadczalnie współczynnik wzmocnienia krytycznego. Z rysunku 2 w części pierwszej artykułu odczytano wzmocnienie krytyczne i okres drgań krytycznych, a następnie wyznaczono parametry regulatora.
 |
Rys. 3.
Po przeprowadzeniu symulacji, uzyskano następującą charakterystykę skokową (rys. 3).
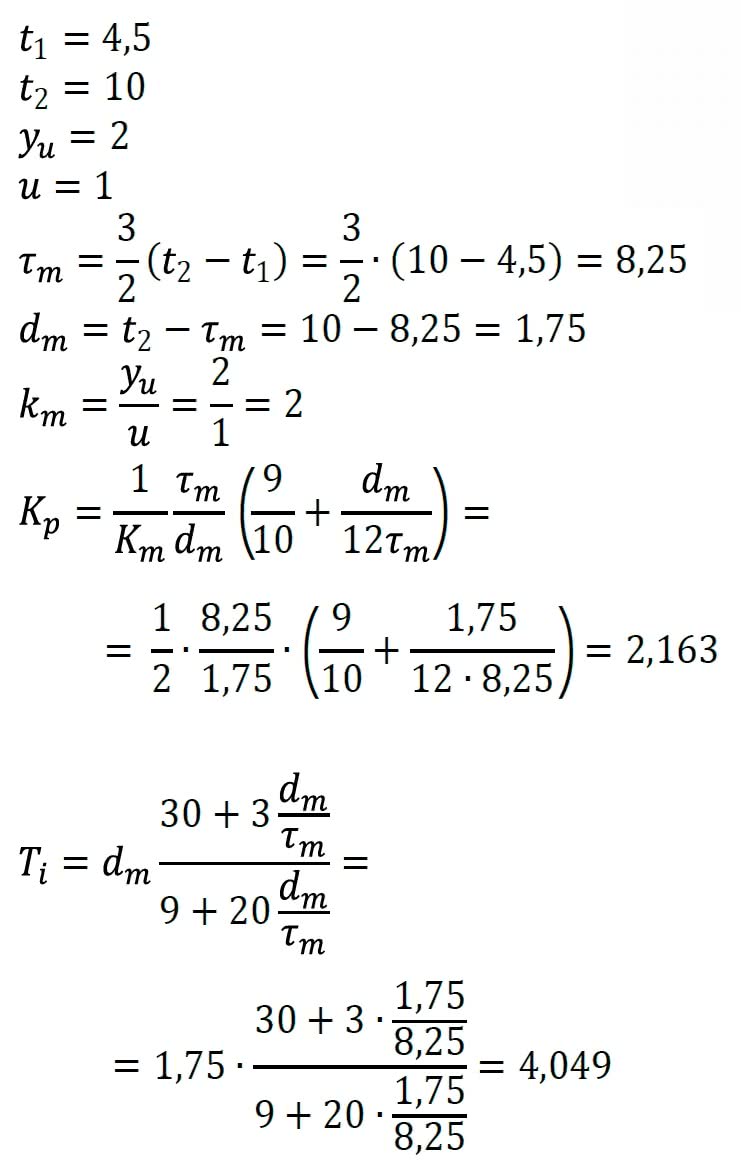
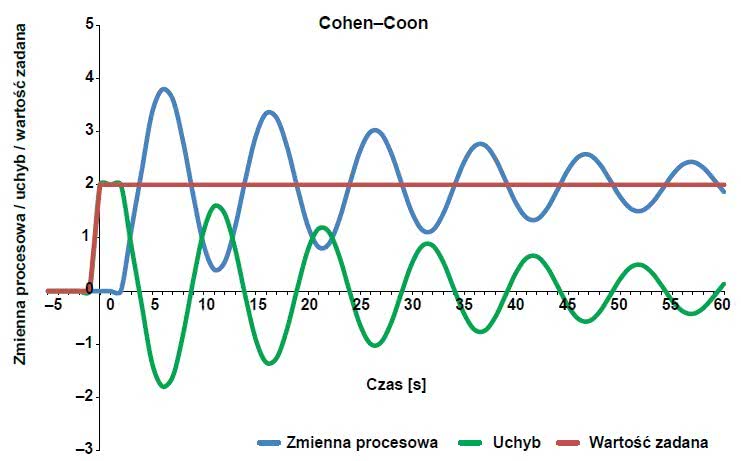
Trzecią testowaną metodą jest metoda Cohena-Coona. Do obliczenia nastaw regulatora PI wykorzystano rysunek 3 z pierwszej części.
 |
Rys. 4.
W toku symulacji wykreślono następującą charakterystykę skokową (rys. 4).
Zachowanie symulowanego obiektu po zastosowaniu nastaw dobranych metodą Cohena-Coona jest niezgodne z oczekiwaniami. Odpowiedź układu jest bardzo szybka, jednak wpada on w duże, bardzo słabo tłumione oscylacje, które dyskwalifikują tak dobrane parametry. Nie świadczy to o całkowitej nieprzydatności metody, a jedynie o tym, że dla obiektu o takiej transmitancji jak symulowany, metoda Cohena-Coona nie daje odpowiednich rezultatów.
W takim przypadku należy albo zastosować inną metodę, albo próbować dostroić regulator, zmieniając nastawy. Wyeliminowanie oscylacji jest możliwe przez podzielenie współczynnika wzmocnienia Kp przez 2. Zmiana wzmocnienia ma znaczący wpływ na poprawę przebiegu odpowiedzi skokowej (rys. 5).
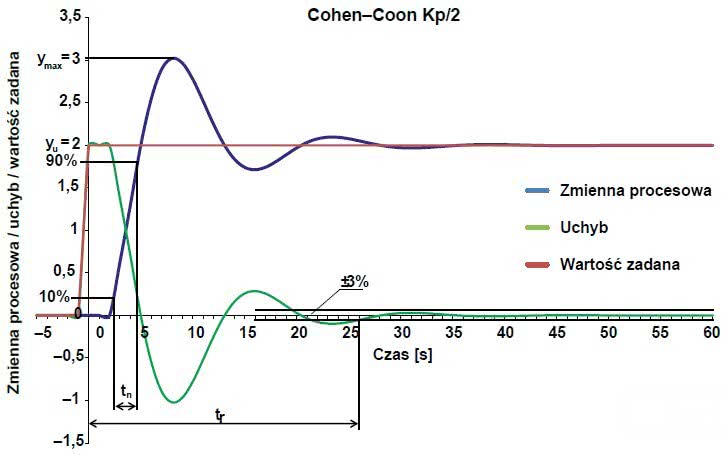
Rys. 5.
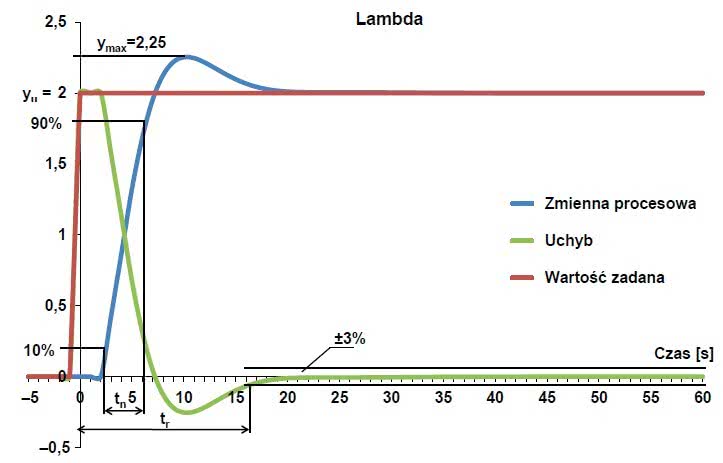
Ostatnią z prezentowanych jest metoda lambda. Przyjęto współczynnik λ równy 3 i dobrano nastawy, wykorzystując wielkości odczytane z rysunku 4 (ostatni w pierwszej części artykułu). Przeprowadzono następujące obliczenia:
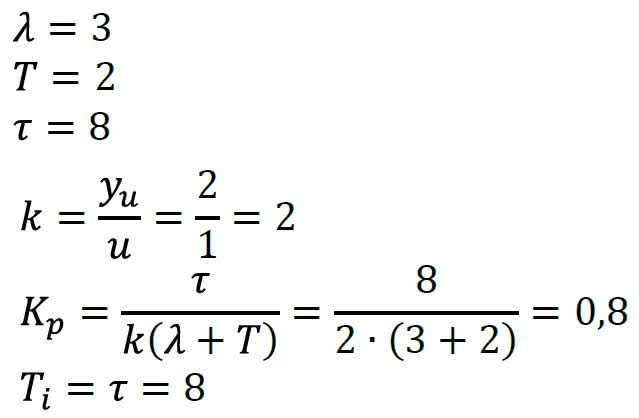 |
W rezultacie otrzymano poniższą charakterystykę (rys. 5).
PODSUMOWANIE WYNIKÓW SYMULACJI

Parametry dla różnych metod regulacji
Na podstawie symulacji wyznaczono parametry charakteryzujące jakość regulacji i zebrano je w tabeli poniżej, aby uzyskać możliwość miarodajnego porównania rezultatów i oceny przydatności zaprezentowanych metod.
Analiza charakterystyk i poniższej tabeli pozwala stwierdzić, że w każdym przypadku został osiągnięty założony cel, czyli szybkie uzyskanie wartości zadanej przy uchybie ustalonym równym zero, jedynie w przypadku metody Cohena-Coona należało skorygować obliczony współczynnik Kp.
Trudno jednoznacznie ocenić wyniki przeprowadzonych badań, a interpretacja wyników jest zależna od specyfiki procesu poddawanego regulacji. Spoglądając na te ostatnie, można stwierdzić, że najbardziej optymalne ze względu na wszystkie uwzględniane kryteria są nastawy uzyskane metodą Zieglera-Nicholsa opartą na współczynnikach wzmocnienia krytycznego, ponieważ zarówno czasy ustalania i narastania, jak i przeregulowanie są niewielkie.
Patrząc z innej perspektywy, to przebieg uzyskany przy użyciu metody lambda jest najbardziej łagodny i nie występują oscylacje w stanie nieustalonym, co niewątpliwie jest dużą zaletą dla procesu, w którym wymagane jest małe przeregulowanie i bardzo stabilne odwzorowanie wartości zadanej, nawet kosztem dłuższego czasu narastania. Minimalne wartości tego czasu osiągnięto dla metody Cohena-Coona i metody Zieglera-Nicholsa bazującej na odpowiedzi skokowej układu otwartego, jednak negatywnym aspektem są długie czasy ustalania i duże przeregulowania.
Przydatność danej metody jest zależna od właściwości regulowanego obiektu i wymagań stawianych jakości regulacji, a dobór najbardziej odpowiedniej leży w gestii osoby strojącej regulator. Nie jest możliwe wyróżnienie najlepszej, będącej uniwersalnym antidotum na każdy źle pracujący regulator.
NOWOCZESNE ROZWIĄZANIA
Rys. 6.
Nawet poprawnie skonfigurowany regulator, którego nastawy zapewniają regulację odpowiadającą stawianym wymaganiom, nie jest gwarancją poprawnego działania układu w każdej sytuacji. Zmieniające się warunki procesu są w stanie podlegać tak dużym odchyleniom, że należałoby ponownie skonfigurować regulator. Z uwagi na pracochłonny i często kłopotliwy proces doboru nastaw rozwiązanie takie nie wchodzi w grę.
Niektóre regulatory są wyposażone w możliwość harmonogramowania wzmocnienia, czyli wprowadzenia kilku zestawów nastaw, używanych w zależności od wartości pewnych zmiennych charakteryzujących zmiany w procesie. To podejście mające sens w przypadku, gdy zmiany te są możliwe do przewidzenia i są na tyle zauważalne i skokowe, że obiekt regulacji nie znajduje się okresowo w stanie pomiędzy optymalnym działaniem dwóch zestawów nastaw.
W sytuacji, gdy transmitancja układu regulacji zmienia się w sposób ciągły, jest nieliniowa lub podlega częstym i niewielkim zmianom, celowe byłoby strojenie regulatora na bieżąco. Rozwiązaniem jest strojenie adaptacyjne, oferowane przez część producentów regulatorów. Polega ono na bieżącym korygowaniu nastaw przez specjalne algorytmy na podstawie sygnałów wejściowych i wyjściowych regulatora.
Kolejnym udogodnieniem dla projektantów jest funkcja autotuningu, czyli automatycznego wstępnego doboru nastaw przez regulator. Automatyczne strojenie jest wykonywane przy uruchomieniu danego układu sterowania i polega na tym, że regulator przy użyciu zaprogramowanych wymuszeń bada odpowiedź układu i na jej podstawie wyznacza nastawy.
Tak otrzymane parametry niekoniecznie muszą zapewniać optymalną regulację, ale mogą być dobrym punktem wyjściowym do dalszego strojenia. Na przeszkodzie mogą jednak stanąć względy bezpieczeństwa lub ograniczenia techniczne uniemożliwiające regulatorowi swobodne zadawanie wymuszeń koniecznych do przeprowadzenia autotuningu.
Dodatkową pomocą w zapewnieniu jakości regulacji oferowaną przez niektóre regulatory są funkcje takie jak kompensator całkująco-różniczkujący (lead-lag) poprawiający stabilność (działanie różniczkujące) i minimalizujący uchyb w stanie ustalonym (działanie całkujące).
W regulatorach z członem całkującym niekorzystnym zjawiskiem jest windup całkowania polegający na akumulacji uchybu, prowadzącą do przeregulowań. Przeciwdziałać temu zjawisku może zamrożenie działania członu całkującego do czasu zaniknięcia nadmiernego błędu lub reset jego wartości. Korzystne bywa również wprowadzanie limitów ograniczających sygnał sterujący regulatora w celu uzyskania gładszego przebiegu regulacji i uniknięcia oscylacji.
TRUDNOŚCI PRAKTYCZNE
Symulacja umożliwiła przetestowanie wszystkich opisanych metod. Gdyby jednak spróbować zastosować je w praktyce, wyznaczenie parametrów potrzebnych do obliczenia nastaw mogłoby przysporzyć wielu trudności. Do otrzymania charakterystyki skokowej układu otwartego lub do wprowadzenia niegasnących oscylacji, co jest wymagane w przedstawionych metodach, konieczne jest odizolowanie układu od wpływu zewnętrznych zakłóceń. Ta pierwsza i zasadnicza trudność często bywa nie do pokonania, ponieważ regulowana zmienna procesowa może być zależna od szeregu różnych czynników, których zdeterminowanie w sposób umożliwiający wyznaczenie nastaw nie zawsze jest możliwe.
Kolejną potencjalną przeszkodą jest zapis danych potrzebnych do wyznaczenia charakterystyk oraz ich graficzne przedstawienie. Jeśli zmienna procesowa jest rejestrowana przez sterownik lub system nadrzędny, to nie powinno być problemu, wystarczy zrobić zrzut ekranu trendu lub zapisać dane pomiarowe do pliku i na ich podstawie zrobić wykres. Jeśli nie ma takiej możliwości, dla części metod możliwe jest ręczne zanotowanie punktów charakterystycznych i czasów ich osiągnięcia, przy użyciu stopera i ołówka.
W tym miejscu uwidocznia się pewien newralgiczny punkt, mający duży wpływ na wyniki, mianowicie dokładność wyznaczania parametrów stosowanych w obliczeniach nastaw. Nietrudno stwierdzić, że nawet niewielkie przekłamania mają znaczący wpływ na otrzymane rezultaty. Należy pamiętać o tym, że opisywane metody są tylko narzędziem pomocniczym przy strojeniu regulatora i nawet użyte z aptekarską dokładnością nie są gwarancją uzyskania satysfakcjonujących rezultatów, a otrzymane współczynniki mogą wymagać ręcznej korekty.
CZY WARTO KORZYSTAĆ?
Alternatywą jest zawsze ręczne strojenie regulatora, wymaga ono jednak dużo czasu lub doświadczenia. W przypadku powtarzalnych układów regulacji, zastosowanie używanych wcześniej nastaw jest dobrą bazą wymagającą ewentualnie lekkich poprawek. Dla całkowicie nowego obiektu taką bazą mogą być nastawy dobrane przy użyciu jednej z opisanych metod lub innej.
Jest ich wiele, a różnorodność pod względem sposobu wyznaczania nastaw oraz rezultatów w zależności od typu regulowanego obiektu pozwala na wybranie najbardziej odpowiedniej do danego przypadku. Konieczność ręcznego wyznaczania nastaw w ciemno, metodą prób i błędów na całkowicie nieznanym obiekcie, czyni ten proces bardzo czasochłonnym, a możliwość ograniczenia tego czasu jest wystarczającym argumentem, żeby spróbować którejś z metod.
Piotr Ziółkowski