CZĘŚĆ 1. ZASILANIE TRAMWAJÓW
 Tramwaje pasażerskie zostały wprowadzone do użytku na początku XIX wieku. Początkowo były one ciągnięte przez konie, a później przez parowozy. Pod koniec XIX wieku w Niemczech została uruchomiona pierwsza linia tramwajów elektrycznych.
Tramwaje pasażerskie zostały wprowadzone do użytku na początku XIX wieku. Początkowo były one ciągnięte przez konie, a później przez parowozy. Pod koniec XIX wieku w Niemczech została uruchomiona pierwsza linia tramwajów elektrycznych.
Obecnie tramwaje elektryczne w dalszym ciągu są popularnym środkiem transportu zbiorowego w wielu krajach. W Polsce można nimi podróżować na przykład w takich miastach, jak: Warszawa, Gdańsk, Kraków, Łódź czy Wrocław, natomiast na świecie tramwaje kursują m.in. we: Francji, Anglii, Szwecji, Japonii czy Australii.
Trakcja tramwajowa a kolejowa
Tramwaje elektryczne zasilane są z sieci trakcyjnej. W Polsce płynie nią prąd stały o napięciu 600 V. Dla porównania, w kolejowej sieci trakcyjnej są to 3 kV. Inaczej niż w przypadku tej ostatniej, która stanowi w skali całego kraju system połączony, trakcje tramwajowe są rozproszone. Dzięki temu są od siebie niezależne.
Z tego powodu, pod względem konstrukcji bardziej różnią się one pomiędzy sobą niż segmenty kolejowej sieci trakcyjnej. Za to ich rozbudowa, przebudowa czy modernizacja są dzięki temu łatwiejsze do realizacji.
Wykorzystując ten fakt oraz środki pozyskiwane z Unii Europejskiej w ostatnich latach w większości polskich miast dokonano znaczących inwestycji. Fundusze z UE przeznaczano przeważnie na budowę od podstaw nowych linii tramwajowych i wymianę starego taboru na nowoczesne składy, w których udogodnienia dla pasażerów, takie jak na przykład klimatyzacja, dźwiękowe i wizualne systemy informacji i strefy niskopodłogowe, są standardem. Remontowano również infrastrukturę tramwajową.
BUDOWA SIECI TRAKCYJNEJ I KLASYFIKACJA SIECI JEZDNYCH
Sieć trakcyjna wraz z tramwajem tworzą obwód elektryczny. Urządzenia elektryczne znajdujące się na pokładzie tego pojazdu są odbiornikami prądu, który płynie przez nie z sieci jezdnej zasilanej z podstacji trakcyjnej do sieci powrotnej.
Sieć jezdna trakcji ma charakter napowietrzny, natomiast sieć powrotną tworzą szyny. Zamykają one obwód przez połączenie z podstacją trakcyjną.
Część napowietrzna sieci trakcyjnej jest zawieszona nad torami na wysokości zwykle 5,5 metra, mierząc od górnej krawędzi (główki) szyny. W szczególnych przypadkach może być ona niższa. Przykładowo, na terenie zajezdni albo jeśli trasa tramwaju przebiega pod mostem, tunelem czy inną tego typu budowlą, minimalna wysokość zawieszenia sieci jezdnej to 4,2 metra.
Wyróżnia się kilka rodzajów sieci jezdnych. Podstawowa klasyfikacja dzieli je na sieci płaskie i łańcuchowe. Te pierwsze składają się z samych przewodów jezdnych. Sieci płaskie stosuje się na przykład wówczas, gdy nie można zbudować wyższej sieci trakcyjnej. Z kolei w przypadku sieci łańcuchowych przewody jezdne podwieszane są do linii nośnej. Do przymocowania ich do niej używane są specjalne linki, tzw. wieszaki. Innym kryterium klasyfikacji sieci jezdnych jest sposób ich naprężania.
SIECI SKOMPENSOWANE I NIESKOMPENSOWANE
Naprężanie jest konieczne, ponieważ z powodu rozszerzalności cieplnej metali, pod wpływem skrajnych temperatur otoczenia, bardzo wysokich podczas upałów oraz bardzo niskich w czasie mrozów, przewody jezdne rozciągają się, co przy nadmiernym wydłużeniu powiększa ich zwis lub kurczą się, co z kolei przy nadmiernym ich ściągnięciu grozi ich zerwaniem. Pod tym względem sieci jezdne dzielone są na sieci: skompensowane łańcuchowe, półskompensowane oraz bez kompensacji (nieskompensowane).
W tych pierwszych naciąg przewodu jezdnego reguluje się samoczynnie, dzięki zamontowaniu na końcach odcinków sieci mechanizmów z ciężarami, które działają na zasadzie przekładni. W zależności od tego, czy przewody się skracają, czy wydłużają, naprężacze, odpowiednio, poluzowują je albo naciągają.
W sieciach nieskompensowanych, którymi mogą być zarówno sieci płaskie, jak i łańcuchowe, takich mechanizmów się nie stosuje. Trzeci typ, czyli sieci półskompensowane, są rozwiązaniem pośrednim. W ich przypadku naprężaniu stosownemu do aktualnie panujących warunków atmosferycznych podlegają tylko przewody jezdne.
Sieci bez kompensacji powinno się budować na odcinkach, po których tramwaj porusza się z małą prędkością (do 30 km/h). Tam, gdzie pojazd będzie przyspieszał, powinno się natomiast korzystać z sieci pół- i w pełni skompensowanych.
Przykład: Przewody jezdne w trakcjach tramwajowych i kolejowych
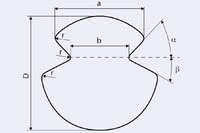
Rys. 1. Wymiary przewodów Djp100 i DjpS100: D = 12 mm, a = 8,7 mm, (a-b)/2 min = 1,25 mm, r = 0,38 mm, α = 51, β = 27
Minimalna przewodność elektryczna: 56,3 m/Ω·mm², moduł Younga: 120 kN/mm², minimalna wytrzymałość na rozciąganie: 375 N/mm² (DjpS), 355 N/mm² (Djp), minimalne wydłużenie przy zerwaniu: 3%, maksymalna rezystancja przewodu: 0,183 Ω/km, dopuszczalna tolerancja przekroju: ±2,5%, waga: 889 kg/km.
Przewody spełniają normy: PN-E-90090 pt. Przewody jezdne z miedzi i miedzi modyfikowanej oraz PN-EN 50149 pt. Zastosowania kolejowe - Urządzenia stacjonarne - Trakcja elektryczna - Profilowane przewody jezdne z miedzi i jej stopów.
www.nkt.com.pl
|
Z CZEGO WYKONUJE SIĘ PRZEWODY JEZDNE DO TRAKCJI TRAMWAJOWYCH I KOLEJOWYCH?
Przewody jezdne, które określa się skrótem Djp, czyli druty jezdne profilowane, mają postać okrągłych prętów metalowych o przekroju w przedziale 50-120 mm², najczęściej 100 mm², z wyżłobieniami w postaci symetrycznych rowków w górnej części. Taki kształt umożliwia ich pewne zamocowanie i podwieszenie oraz prawidłową współpracę z odbierakiem prądu.
Przewody jezdne są bardzo ważnym elementem sieci trakcyjnej. Od nich bowiem w dużym stopniu zależy niezawodność oraz sprawność energetyczna zasilania tramwajów. W związku z tym dwie najważniejsze cechy, którymi powinien charakteryzować się materiał, z którego wykonuje się te elementy sieci trakcyjnej, to: niska rezystancja oraz wysoka wytrzymałość mechaniczna.
Materiałami, które najlepiej spełniają powyższe wymagania w zakresie właściwości elektryczno-mechanicznych, dzięki czemu są najczęściej wykorzystywane do produkcji przewodów jezdnych, są miedź i jej stopy.
ZALETY PRZEWODÓW TYPU DJPS100
Inne metale dodaje się do miedzi, ponieważ w wysokich temperaturach, około +80°C, pogarsza się jej wytrzymałość. Dodatki, chociaż nieznaczenie zwiększają rezystancję drutów jezdnych, bardzo poprawiają ich wytrzymałość i zwiększają temperaturę pracy.
Popularnym materiałem jest na przykład stop miedzi ze srebrem, w którym zawartość Ag wynosi 0,1%. Przewody jezdne wykonane z niego, o przekroju 100 mm², określane są skrótem DjpS100.
W porównaniu do drutów miedzianych, przewody z miedzi srebrowej charakteryzuje kilkakrotnie większa odporność na ścieranie i trochę większa wytrzymałość na zerwanie. Rekrystalizacji ulegają w temperaturze o kilkaset stopni wyższej.
Ponadto DjpS100 rzadziej ulegają uszkodzeniu w skrajnie niskich czy wysokich temperaturach. Wszystko to składa się na to, że ich żywotność jest nawet kilkakrotnie dłuższa niż miedzianych przewodów jezdnych, zwłaszcza na trasach, na których są one bardziej obciążone. W ramce przedstawiamy wybrane parametry przewodów jezdnych typu Djp i wykonanych z miedzi srebrowej (DjpS), na przykładzie produktów z oferty firmy NKT.



















