Maszyny, które są sprzedawane na rynku europejskim, powinny spełniać wymagania Nowej Dyrektywy Maszynowej, czyli 2006/42/WE. Przyjmuje się, że zgodność taka w określonym zakresie jest zapewniona, jeżeli urządzenie zostało zaprojektowane i wykonane według zasad podanych w odpowiednich normach zharmonizowanych z tą dyrektywą.
Maszyny, które są sprzedawane na rynku europejskim, powinny spełniać wymagania Nowej Dyrektywy Maszynowej, czyli 2006/42/WE. Przyjmuje się, że zgodność taka w określonym zakresie jest zapewniona, jeżeli urządzenie zostało zaprojektowane i wykonane według zasad podanych w odpowiednich normach zharmonizowanych z tą dyrektywą.
Standardy zharmonizowane podzielone są na trzy grupy: A, B i C. Normy typu A zawierają ogólne wymagania, wskazówki projektowe oraz podstawowe pojęcia z zakresu bezpieczeństwa maszyn. Przykładem jest PN-EN ISO 12100, w której określono m.in. zasady oceny oraz zmniejszania ryzyka technicznego maszyn.
NORMY GRUP WYROBÓW
Z kolei w standardach typu B podane są wymogi bezpieczeństwa wspólne dla wszystkich maszyn. Te tzw. normy grup wyrobów również dzieli się na typy. Do standardów B1 zaliczane są te, w których zdefiniowano wybrane aspekty bezpieczeństwa maszyn (przykładowo ergonomię, bezpieczne odległości, wymagania elektryczne).
Normy typu B2 dotyczą natomiast konkretnych urządzeń zabezpieczających (na przykład mat i przycisków bezpieczeństwa, osłon, systemów detekcji ruchu).
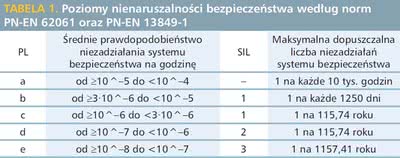
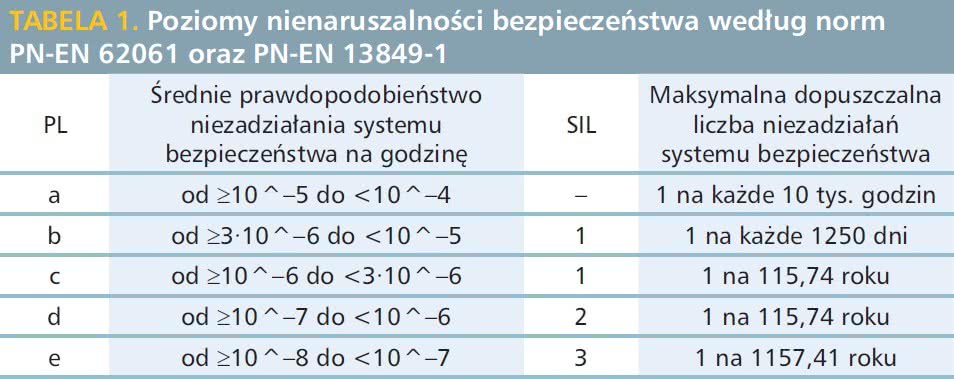
TABELA 1. Poziomy nienaruszalności bezpieczeństwa według norm PN-EN 62061 oraz PN-EN 13849-1
|
Przykładami standardów typu B są:
- PN-EN 62061 "Bezpieczeństwo maszyn - Bezpieczeństwo funkcjonalne elektrycznych, elektronicznych i elektronicznych programowalnych systemów sterowania związanych z bezpieczeństwem",
- PN-EN ISO 13849-1 "Bezpieczeństwo maszyn - Elementy systemów sterowania związane z bezpieczeństwem - Część 1: Ogólne zasady projektowania",
- PN-EN 1088, w której opisano zasady projektowania oraz doboru urządzeń blokujących sprzężonych z osłonami
- PN-EN I SO 13850, określająca warunki użytkowania i zasady projektowania funkcji zatrzymania awaryjnego maszyn.
OD OGÓŁU DO SZCZEGÓŁU
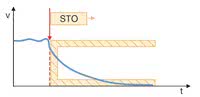
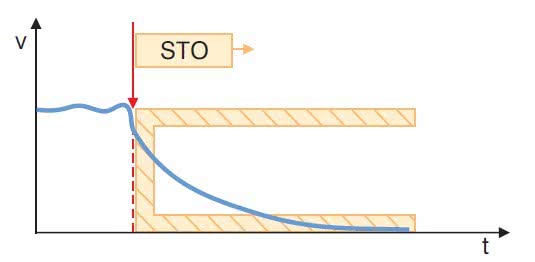
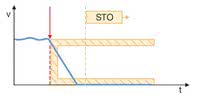
Rys. 1. Funkcja bezpieczeństwa STO polega na odłączeniu zasilania od silnika - nie wytwarza on wówczas momentu obrotowego (siły)
W normach typu C przedstawiane są wymogi bezpieczeństwa dla konkretnych urządzeń, które uzupełniają lub, jeżeli dotyczą tej samej kwestii, zastępują te zawarte w normach typu A i B.
Przykładem jest norma produktowa PN-EN 61800-5-2. Dotyczy ona elektrycznych układów napędowych o regulowanej prędkości, w których można zrealizować różne funkcje bezpieczeństwa (Power Drive System with Safety-Related Functions), czyli PDS(SR).
Te ostatnie to m.in.:
- bezpieczne wyłączenie momentu (Safe Torque Off , STO),
- bezpieczny stop 1 oraz 2 (Safe Stop 1, Safe Stop 2, SS1, SS2),
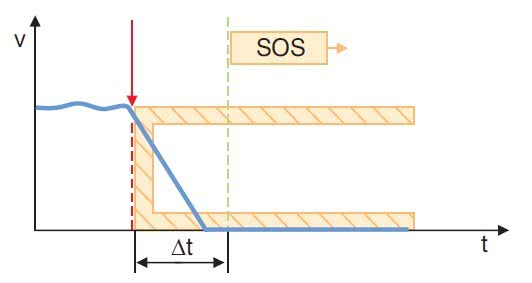
- bezpieczne zatrzymanie pracy (Safe Operating Stop, SOS),
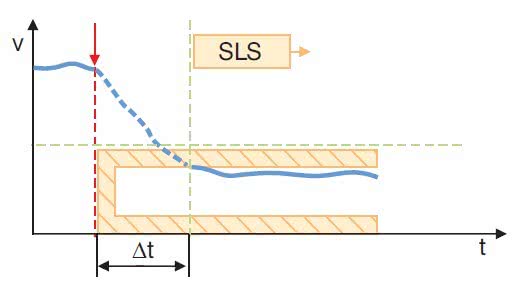
- bezpiecznie ograniczona prędkość (Safely Limited Speed, SLS),
- bezpieczny zakres prędkości (Safe Speed Range, SSR),
- bezpieczny kierunek ruchu (Safe Direction, SDI),
- bezpiecznie ograniczona długość kroku (Safe Limited Increment, SLI),
- bezpieczne wysterowanie hamulców (Safe Brake Control, SBC)
- bezpieczny test hamulców (Safe Brake Test, SBT).
NORMY POWIĄZANE
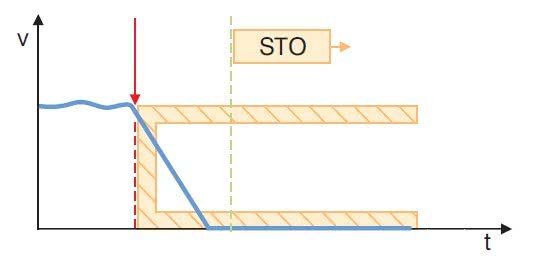
Rys. 2. Bezpieczny stop SS1 to dwuetapowa funkcja bezpieczeństwa
Do scharakteryzowania funkcji bezpieczeństwa w PN-EN 61800-5-2 wykorzystywane są trzy kategorie zatrzymania zdefiniowane w normie PN-EN 60204-1 "Bezpieczeństwo maszyn - Wyposażenie elektryczne maszyn - Część 1: Wymagania ogólne". Zatrzymanie niekontrolowane kategorii 0 polega na natychmiastowym odłączeniu zasilania od napędu maszyny.
W przypadku zatrzymania kontrolowanego kategorii 1 napęd maszyny jest podłączony do źródła napięcia do momentu jej całkowitego zatrzymania - dopiero wówczas zasilanie jest odcinane. Z kolei w wypadku zatrzymania kontrolowanego kategorii 2 zasilanie po unieruchomieniu maszyny w ogóle nie jest odłączane.
Według PN-EN 60204-1 funkcja zatrzymania awaryjnego powinna być zrealizowana jako zatrzymanie niekontrolowane kategorii 0 lub kontrolowane kategorii 1. Producenci urządzeń PDS(SR) są ponadto zobowiązani do określenia w ich specyfikacji poziomu nienaruszalności (zapewnienia) bezpieczeństwa.
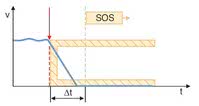
Rys. 3. Funkcja bezpieczeństwa SS1 aktywuje funkcję SOS
Parametr ten może być wyrażony jako jeden z trzech poziomów nienaruszalności bezpieczeństwa SIL (Safety Integrity Level) lub jeden z pięciu poziomów bezpieczeństwa PL (Performace Level). Poszczególnym poziomom przyporządkowane są przedziały prawdopodobieństwa wystąpienia błędu skutkującego niezadziałaniem funkcji ochronnej. Im wyższy jest ten stopień, tym mniej prawdopodobne jest, że zabezpieczenie nie zadziała.
Klasyfikacja wskaźników SIL przedstawiona jest w normie PN-EN 62061, a PL w PN-EN ISO 13849-1. Ta pierwsza bazuje na normie PN-EN 61508, a jej wymagania mogą być stosowane wyłącznie do systemów elektronicznych.
Z kolei PN-EN 13849- 1 (wraz z innymi normami) zastąpiła wcześniej stosowaną PN-EN 954-1, rozszerzając zastosowania pod względem zakresu urządzeń (np. systemów pneumatycznych oraz hydraulicznych) oraz wprowadzając probabilistyczną ocenę ryzyka. Porównanie wskaźników SIL oraz PL przedstawiono w tabeli 1. Poniżej zaś przedstawiamy charakterystykę wybranych funkcji oraz ich przykładowe zastosowania.
STO
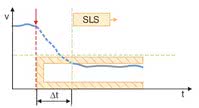
Rys. 4. Funkcja SLS polega na monitorowaniu prędkości silnika
Funkcja bezpieczeństwa STO (rys. 1) polega na odłączeniu zasilania od silnika, w efekcie czego nie wytwarza on momentu obrotowego lub siły (w wypadku silników liniowych). Odpowiada to niekontrolowanemu zatrzymaniu kategorii 0 według klasyfikacji przedstawionej w normie PN-EN 60204-1.
STO jest podstawową metodą zapobiegania nagłemu i nieoczekiwanemu rozruchowi silnika powodującemu niekontrolowane przemieszczenie się ruchomych części maszyny. Najlepiej sprawdza się w przypadku, gdy nie jest wymagane natychmiastowe zatrzymanie całego układu napędowego. Tarcie oraz inercja silnika i jego mechanicznego obciążenia wpływają bowiem na szybkość hamowania.
Dlatego ważne jest, by ta ostatnia zapewniała w danym przypadku odpowiedni poziom bezpieczeństwa. W pewnych zastosowaniach STO konieczne jest też użycie dodatkowych mechanizmów (na przykład hamulców w połączeniu z funkcją SBC), które zapobiegną samoistnemu przemieszczaniu się mechanicznych obciążeń układu napędowego pod wpływem sił zewnętrznych (na przykład grawitacji).
To ostatnie stanowi duże zagrożenie dla pracowników, którzy przekonani o zadziałaniu funkcji zatrzymania znaleźliby się w strefie zabronionej.
 Aplikacja 1 Aplikacja 1
W jednym z zakładów produkujących kartony z wytłoczeniami, z których później składane są pudełka na produkty spożywcze (płatki śniadaniowe, kasze, ryż), miał miejsce wypadek. Pracownik nadzorujący pracę maszyny wycinającej z arkuszy poszczególne pudełka został ranny podczas usuwania z niej resztek kartonu.
Okazało się, że nowo zatrudniona osoba, aby uniknąć długiego przestoju produkcji, wbrew wcześniejszym zaleceniom nie wyłączyła maszyny na czas porządkowania.
 Aby zapobiec podobnym wypadkom w przyszłości, zdecydowano się na modernizację urządzenia. Jego producent wyposażył je w napęd ze zintegrowaną funkcją bezpiecznego stopu 2. Dzięki temu uzyskano zarówno ochronę personelu, jak i możliwość szybkiego restartu maszyny. Aby zapobiec podobnym wypadkom w przyszłości, zdecydowano się na modernizację urządzenia. Jego producent wyposażył je w napęd ze zintegrowaną funkcją bezpiecznego stopu 2. Dzięki temu uzyskano zarówno ochronę personelu, jak i możliwość szybkiego restartu maszyny.
|