
Dlaczego w sieciach przemysłowych EtherCAT jest lepszy niż Ethernet?
 Zapytaj o produkt
Zapytaj o produkt
EtherCAT (Control Automation Technology) powstał w 2003 roku i od tamtej pory dynamicznie się rozwija, będąc jednym z najpopularniejszych protokołów stosowanych w przemyśle. Odniósł sukces dzięki elastyczności w zakresie budowy sieci, łatwej konfiguracji oraz dużej szybkości wymiany informacji.
EtherCAT bazuje na warstwie fizycznej sieci Ethernet, która charakteryzuje się takimi cechami, jak:
- wysoka prędkość transmisji danych,
- duży zasięg pozwalający na budowę oddalonych i rozproszonych węzłów,
- skalowalność,
- relatywnie niskie koszty związane z budową i utrzymaniem sieci.
Wadą Ethernetu są opóźnienia przy częstej transmisji informacji np. pomiarów z czujników czy przesyłu sygnałów sterujących, co w systemach automatyki jest niedopuszczalne. Dzieje się tak, ponieważ mechanizm CSMA/CD (Carrier Sense Multiple Access/Collision Detect) zapewnia sprawiedliwy podział pasma pomiędzy węzły, jednocześnie uniemożliwiając dokładne określenie chwil transmisji oraz czasu, przez jaki urządzenie jest zajęte. Spowodowane jest to tym, że w danym momencie tylko jeden obiekt jest uprawniony do nadawania., Gdy wyczerpie swój czas dostępu do łącza – token zostaje przekazany do innego węzła w sieci. Jeśli dwa lub więcej urządzeń rozpocznie jednoczesne nadawanie, następuje nakładanie się sygnałów elektrycznych zwane kolizją. Po jej wykryciu odczekiwany jest losowy czas i następuje próba ponownej transmisji danych. Taka metoda powoduje niedeterministyczny czas dostępu do łącza i brak możliwości synchronizacji elementów automatyki na terenie zakładu przemysłowego.
Dodatkowo pojawia się problem wydajnościowy wynikający z konstrukcji pojedynczej ramki danych – informacja o wartości temperatury zajmuje zdecydowanie mniej miejsca (około 5%) niż dane kontrolne. Przy dużej ilości urządzeń przepustowość sieci byłaby mocno ograniczona.
EtherCAT łączy zalety warstwy fizycznej sieci Ethernet oraz eliminuje wady warstwy programowej modyfikując sposób przekazywania informacji pomiędzy węzłami. Różnica polega na tym, że pojedyncza ramka nie jest wykorzystywana do przesyłania informacji do jednego konkretnego węzła sieci, jak w przypadku Ethernetu, ale do wielu jednocześnie.
Ramka przesłana przez węzeł typu master przechodzi przez wszystkie węzły typu slave, które przetwarzają ją w locie - dzięki zastosowaniu techniki FMMU (fieldbus memory management unit). Informacja odbierana jest przez wszystkie węzły w sieci, gdzie każdy z nich najpierw sprawdza czy znajdują się w nim dane bezpośrednio dla niego. Jeżeli tak, to odczytuje dedykowany fragment, a następnie wstawia swoją odpowiedź i przekazuje informację dalej. Gdy wiadomość dotrze do ostatniego urządzenia, ramka zostaje zawrócona do punktu wyjściowego.
Dzięki temu, że jest możliwe przenoszone danych do i od wielu węzłów jednocześnie, zostaje rozwiązany problem niskiej efektywności. FMMU sprawia, że 90% zawartości pojedynczej ramki zajmują np. wartości pomiarów, reszta to dane kontrolne.
Topologie sieci EtherCAT
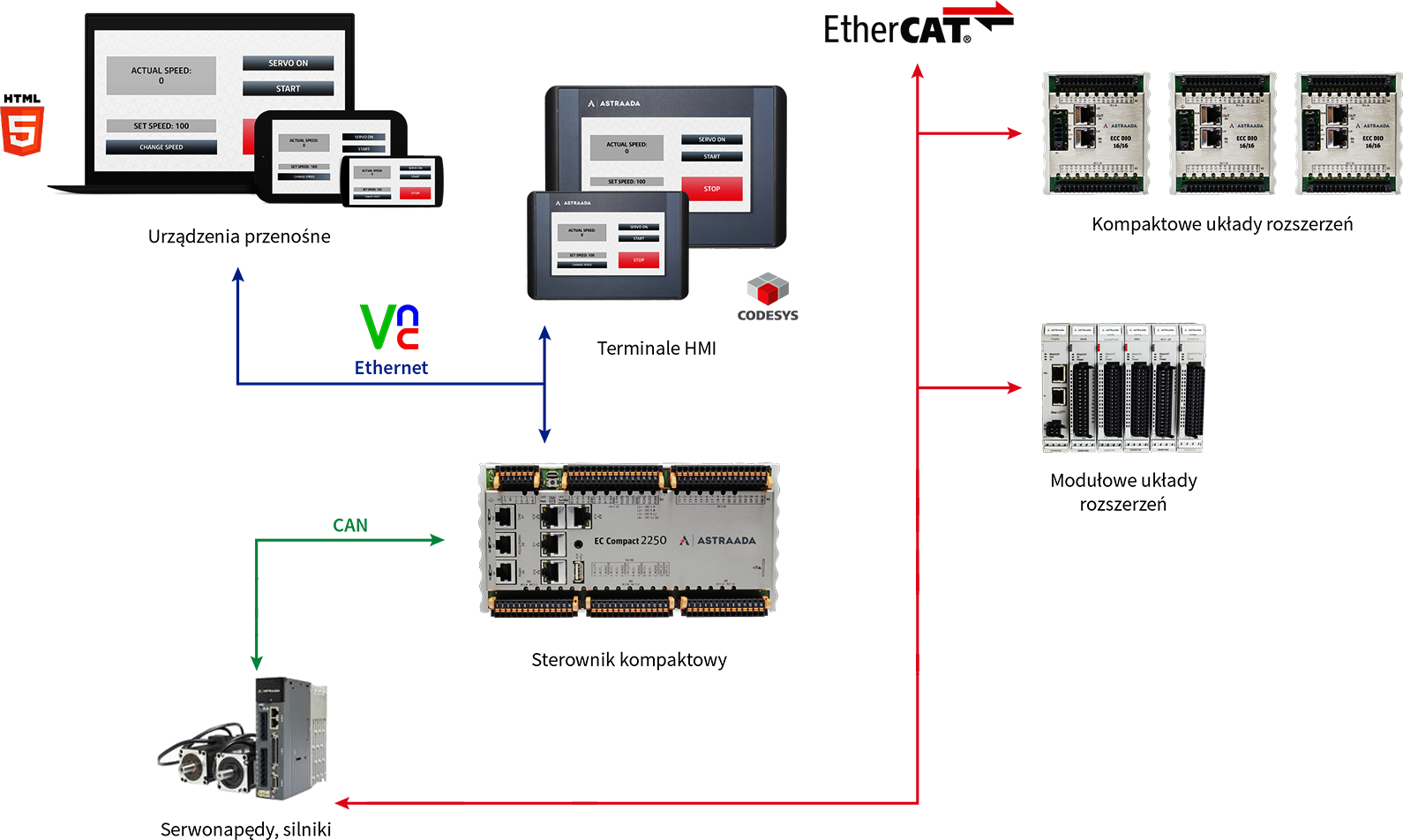
Topologie sieci Ethercat budowane są analogicznie jaki sieci Ethernet. Powszechnie stosuje się układ szyny, drzewa lub gwiazdy. Najprostszym możliwym sposobem komunikacji między sterownikiem PLC a modułami IO jest ethercat\'owa szyna E-Bus, powszechnie stosowana w sterownikach modułowych np. EC1000. W przypadku Astraada One podstawowym elementem takiej sieci jest jednostka centralna. W zależności od potrzeb, do CPU można dołączyć maksymalnie 10 dowolnych modułów I/O lub komunikacyjnych.
Jeżeli wymagana jest większa ilość modułów I/O, można zwiąkszyć ich ilość poprzez zastosowanie Extendera oraz modułu oddalonego tzw. Buskoppelra. W takim wypadku podstawowa jednostka sterująca składa się z CPU, 9 modułów I/O lub komunikacyjnych oraz Extendera. Węzeł oddalony zbudowany jest z bus couplera i maksymalnie 20 modułów I/O lub komunikacyjnych. Medium transmisyjnym w tym wypadku jest skrętka komputerowa kategorii 5, a maksymalna odległość przy tego rodzaju połączeniu wynosi 100 m.
W przypadku sterowników kompaktowych serii ECC2000, konfiguracja jest jeszcze łatwiejsza, ponieważzarówno moduły cyfrowe, jak i analogowe mają wbudowane 2-portowe switche. W praktyce powoduje to, że do stworzenia sieci nie są wymagane dodatkowe urządzenia sieciowe. Rozszerzenie systemu sterowania polega jedynie na wpięciu patchcordu w odpowiedni port (wejścia lub wejścia). Podobnie jak w przypadku sterowników modułowych, górną granicą odległości między węzłami jest 100 m.
Standard Ethercat umożliwia łączenie ze sobą różnych urządzeń, które również wspierają ten standard. Możemy zatem łączyć sterowniki kompaktowe serii ECC2000 z modułami EC1000 przez bus coupler, a także sterować serwonapędami np. Astraada SRV lub SANYO Denki. Wpięcie urządzeń w sieć wygląda identycznie, jak w serii ECC2000. Sterownik ruchu posiada wbudowane dwa porty RJ-45, pozwalające na dodawanie kolejnych napędów. Jedynym warunkiem prawidłowego działania urządzeń jest odpowiednia konfiguracja modułów I/O oraz serwonapędów we wspólnym środowisku programistycznym - Codesys. W głównej mierze ustawienia polegają na zainstalowaniu dedykowanych targetów i wyborze urządzeń z drzewka projektowego.
Skuteczność działania Ethercat potwierdzona jest świetnymi wynikami. Czas wymiany informacji o stanie 10 osi serwonapędów (prędkość, położenie, przyspieszenie, kierunek, moment) trwa około 10 µs, natomiast przesłanie informacji o 256 binarnych wejściach/wyjściach zajmuje w przybliżeniu 13 µs. Takie wyniki dają możliwość sterowanie urządzeniami automatyki przemysłowej w „czasie rzeczywistym".
Bardzo wysoka prędkość transmisji danych, skalowalność oraz łatwa konfiguracja powodują, że EtherCAT stał się najczęściej stosowanym standardem komunikacyjnym zarówno w Polsce, jak i na świecie.







