Rozwój technologiczny robotów mobilnych
Wśród wskazanych przez respondentów nowości technologicznych dotyczących AGV najczęściej powtarzały się: większe możliwości współpracy we flocie i z pozostałymi maszynami, współpraca robotów różnych producentów oraz nawigacja SLAM.
Jak kupowane są i wdrażane AGV w Polsce?
I. Zarządzanie flotą pojazdów AGV
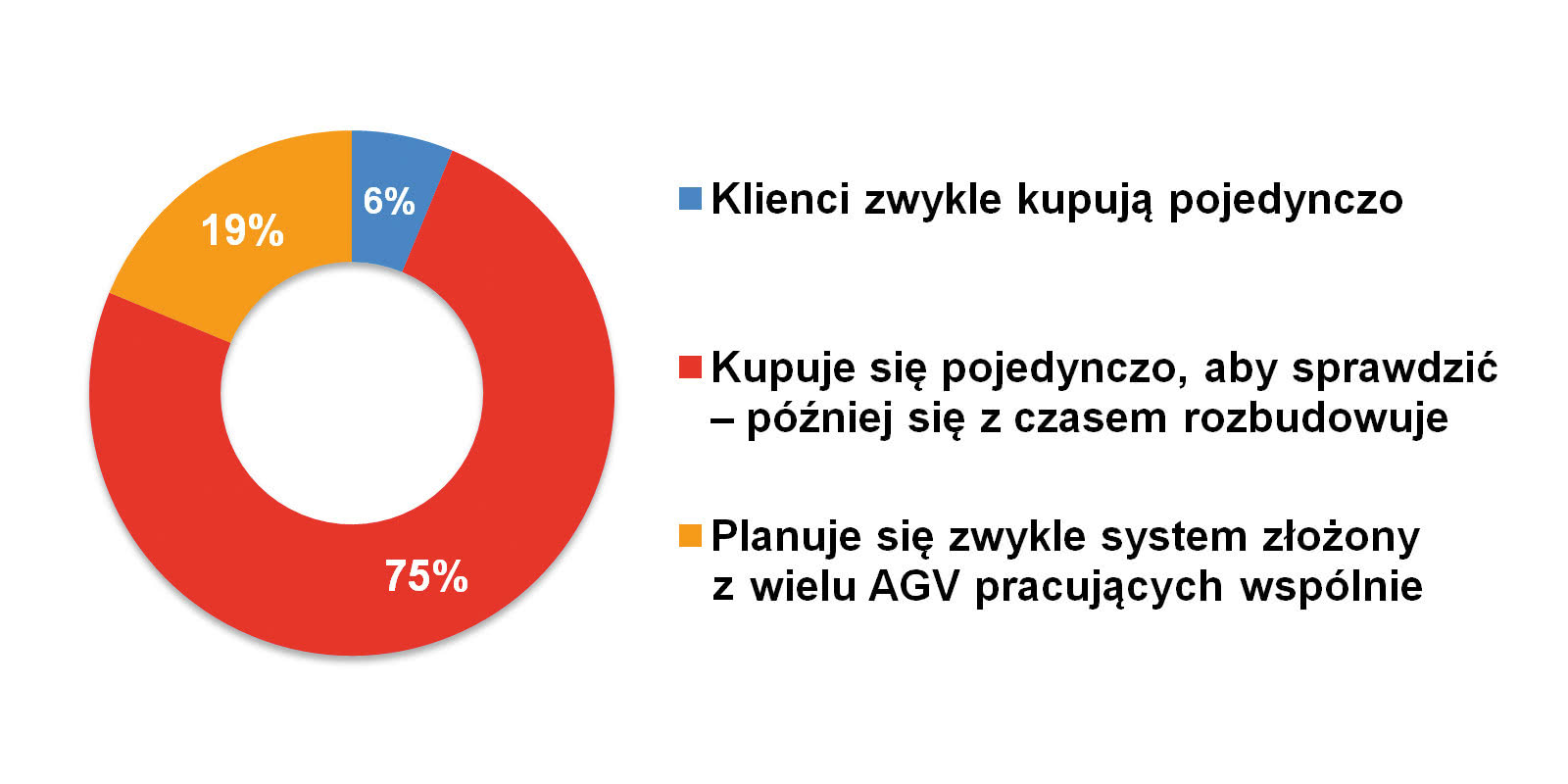
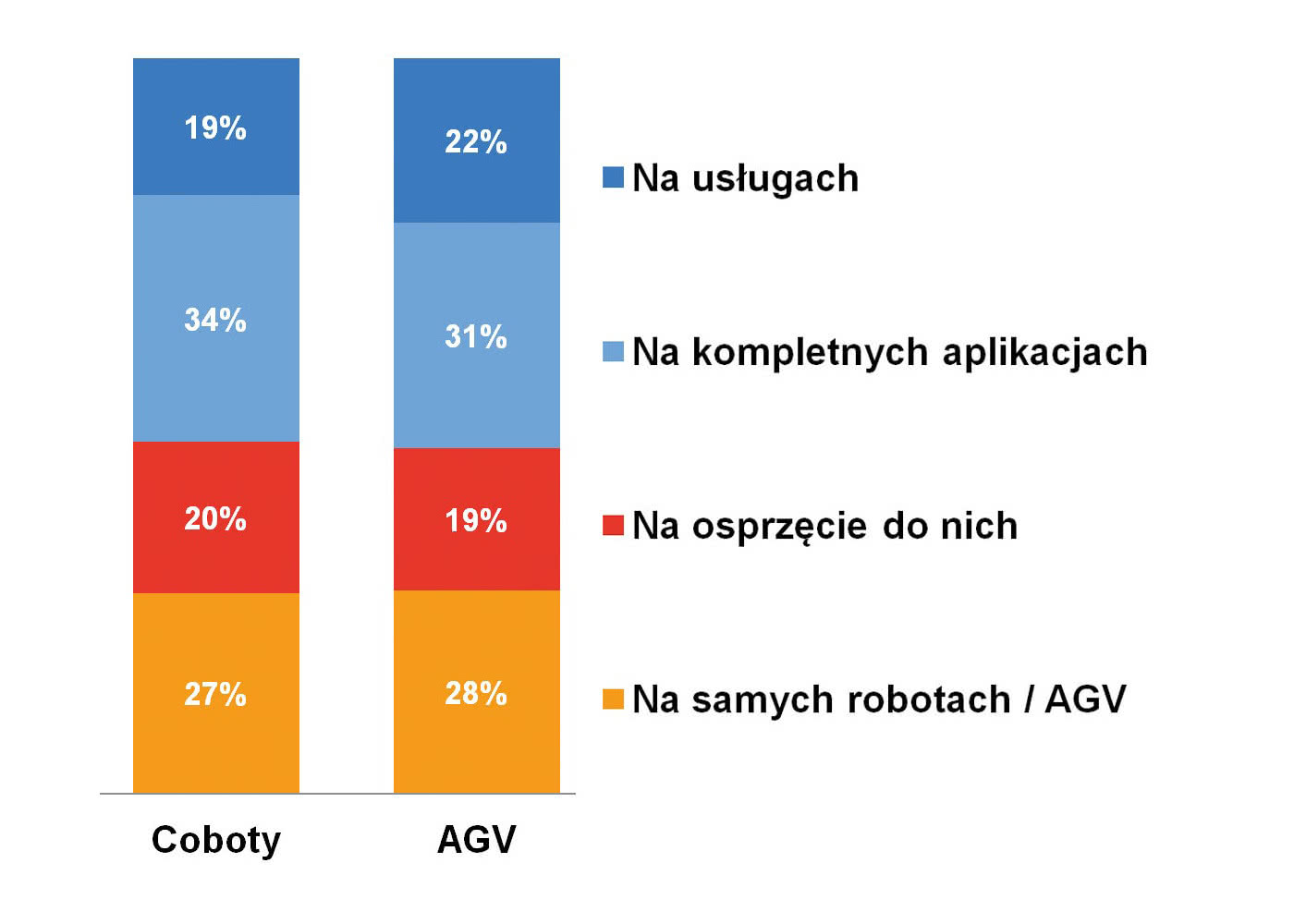
diag14 Jak wygląda sprzedaż omawianych robotów? Na czym zarabiają ich dostawcy?
Od samego początku rozwoju koncepcyjnego tych urządzeń pojedyncze AGV łączone były w całe floty pojazdów. Początkowo umożliwiało to zastępowanie zadań poszczególnych jednostek w czasie ładowania ich akumulatorów, a obecnie uwzględnia się wiele różnych czynników, które należy brać pod uwagę przy optymalizacji działania posiadanych przez zakład robotów. Zarządzanie flotą pojazdów znajdujących się w ruchu jest jednak zadaniem bardziej złożonym niż administrowanie pojedynczymi robotami mobilnymi.
Oprogramowanie zajmujące się zarządzaniem flotą służy do przydzielania zadań (zleceń), które należy optymalnie przypisać do konkretnego AGV4. Najprostszym sposobem rozwiązania tego problemu jest przydzielenie zadania do AGV znajdującego się najbliżej pozycji obiektu, którego zlecenie dotyczy. Po tym etapie kolejnym krokiem jest wyznaczenie najkrótszej ścieżki do miejsca docelowego – zaplanowanie ścieżki. Algorytmy wyznaczające optymalną ścieżkę wykorzystują cyfrową reprezentację otoczenia do wyszukiwania sekwencji ruchów pozwalających jak najszybciej osiągnąć cel. Ważne jest przy tym, aby pojazd AGV mógł odpowiednio nawigować w swoim środowisku, do czego niezbędna jest prawidłowa lokalizacja robotów mobilnych. Nawet jeżeli algorytm plaplanowania ścieżki obliczył najkrótszą drogę dla AGV, nie oznacza to, że maszyna będzie mogła podążać tą ścieżką bez żadnych problemów. Konieczna jest jej ciągła adaptacja w czasie rzeczywistym, bowiem nieprzewidziany obiekt – inne pojazdy, roboty lub osoba mogą ścieżkę zablokować. O unikanie kolizji oraz sytuacji, w której wiele pojazdów AGV może ulec awarii, odpowiada inna podstawowa funkcjonalność oprogramowania do zarządzania flotą – planowanie ruchu. Dzięki niej udaje się unikać kolizji z innymi statycznymi lub dynamicznymi obiektami. Algorytm, zapobiegając blokowaniu pojazdów, ogranicza liczbę pojazdów na danym obszarze. Ograniczanie liczby pojazdów na danym obszarze nazywa się kontrolą strefową. Po dotarciu AGV do miejsca docelowego następuje zazwyczaj załadunek towaru. Dokładnie te same zadania są następnie wykorzystywane do przeniesienia załadowanego przedmiotu do stanowiska komisjonowania.
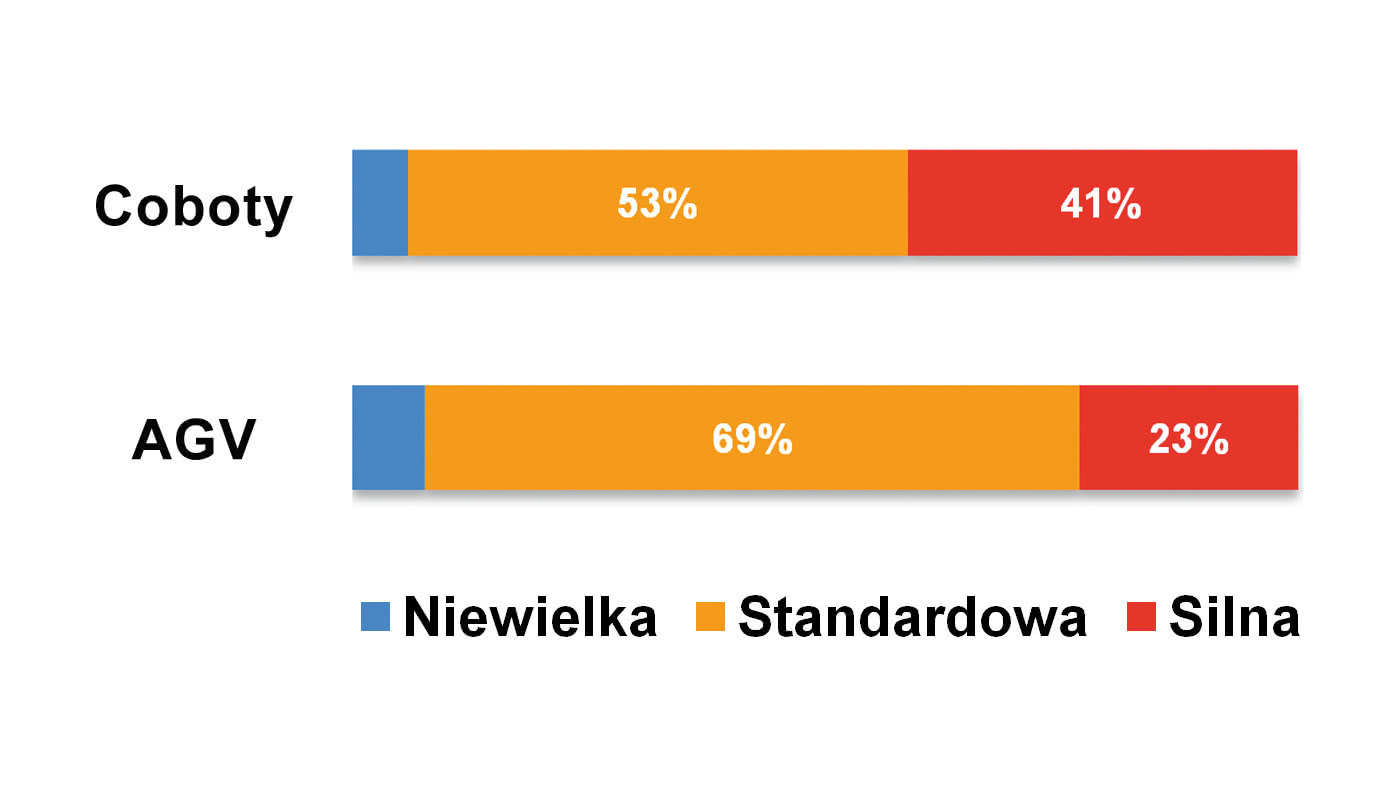
Oceny konkurencji w omawianych w raporcie sektorach rynku krajowego
Równolegle do opisanych zadań realizowane jest inne podstawowe funkcje – zarządzanie pojazdami, czyli kontrola i monitorowanie statusu AGV. W zakres funkcjonalny tego zadania wchodzi m.in. dbałość o takie kwestie jak żywotność baterii, wymagania konserwacyjne i obsługa błędów. Zarządzanie akumulatorami w systemach pojazdów AGV jest szczególnie ważne dla obniżenia kosztów i zwiększenia wydajności systemów zrobotyzowanych. W zależności od czasu ładowania akumulator można naładować całkowicie lub częściowo, aby wypełnić lukę do następnego ładowania. Za optymalizację harmonogramu ładowania odpowiada przeznaczony do tego zadania algorytm.
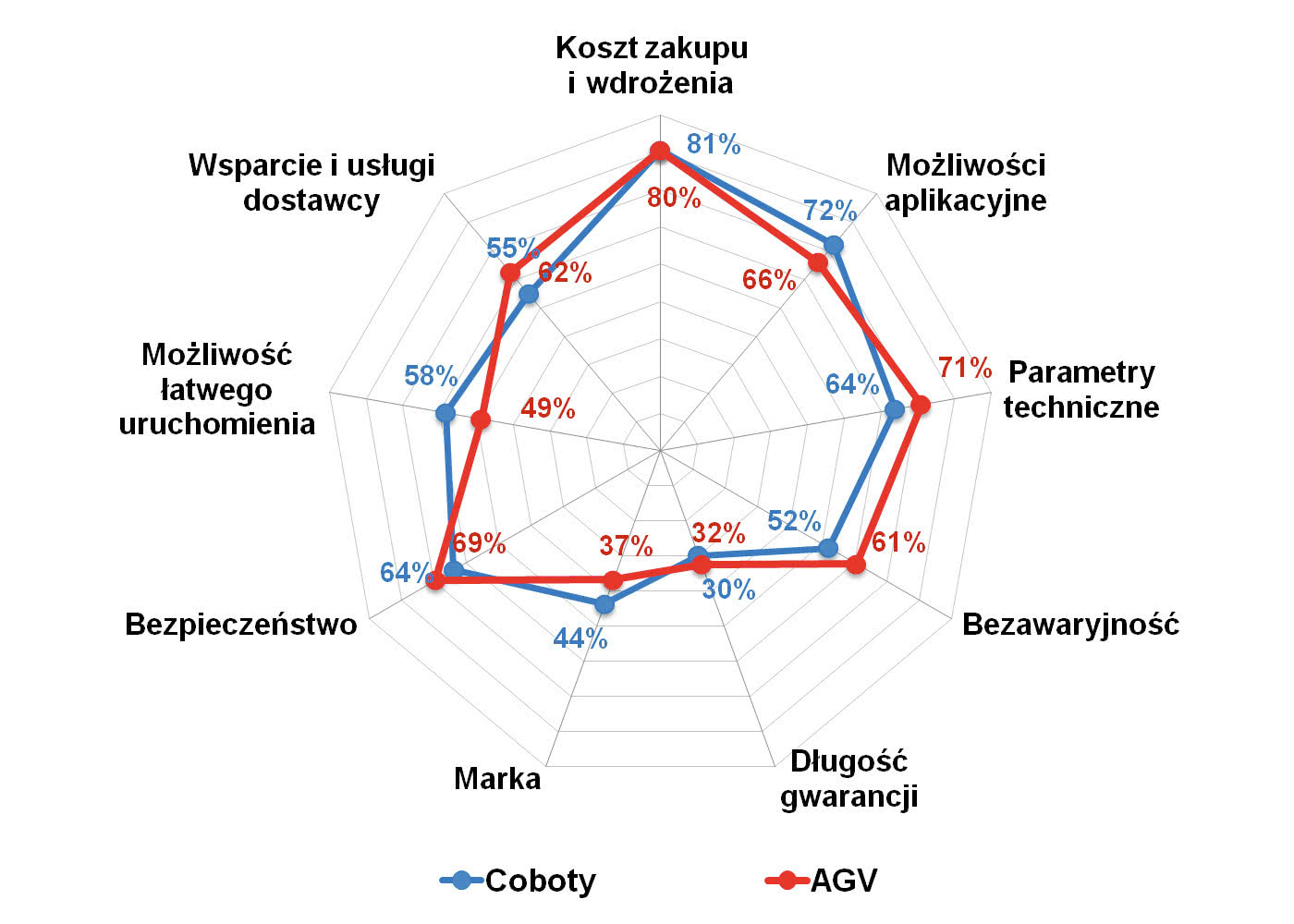
Najważniejsze dla krajowych odbiorców cechy cobotów i AGV
II. Nawigacja SLAM
SLAM (Simultaneous Localization and Mapping) sprawia, że pojazdom AGV, a także innym robotom, łatwiej jest nawigować w przestrzeni. Metody i technologie SLAM rozwijane są od wielu lat, ale dzięki znacznej poprawie szybkości przetwarzania komputerowego i dostępności tańszych czujników, takich jak kamery i dalmierze laserowe, SLAM jest obecnie wykorzystywany w coraz większej liczbie dziedzin.
Systemy SLAM mogą wykorzystywać takie informacje jak liczba obrotów kół oraz dane z kamer i innych czujników przetwarzających obraz, po to aby określić odległości i lokalizację w przestrzeni. Robot może jednocześnie korzystać z kamery i innych czujników, aby stworzyć mapę przeszkód w swoim otoczeniu. Zadanie to nazywane jest mapowaniem.
W SLAM wykorzystywane są dwa rodzaje komponentów technologicznych. Pierwszym jest przetwarzanie sygnału z czujników, drugi to optymalizacja pozycji, która jest niezależna od stosowanego czujnika. Możemy też wyróżnić dwie metody wyznaczania położenia na podstawie danych pochodzących od wspomnianych rodzajów czujników: Visual SLAM oraz LiDAR SLAM5. Visual SLAM (lub vSLAM) wykorzystuje obrazy pozyskane z kamer i innych czujników obrazu. W tym procesie zastosowanie znajdują kamery szerokokątne, kamery typu rybie oko i sferyczne, kamery złożone oraz kamery RGB-D (kamery głębi i ToF). Z kolei wykrywanie światła i określanie odległości (LiDAR) to metoda wykorzystująca przede wszystkim czujnik laserowy (czujnik odległości).
Źródłem wszystkich danych przedstawionych w tabelach oraz na wykresach są wyniki uzyskane w badaniu ankietowym przeprowadzonym w 2023 roku wśród firm dostarczających i integrujących w Polsce roboty współpracujące oraz AGV.
¹) "Collaborative Robot Market – Global Forecast to 2028" https://www.globenewswire.com/news-release/2023/03/06/2620652/0/en/Latest-Report-on-Collaborative-Robot-Cobot-Market-worth-US-9-2-billion-by-2028-Growing-at-a-CAGR-of-41-5.html
²) "Mobile Robotics Market Research Report" https://www.globenewswire.com/en/news-release/2022/09/22/2521240/0/en/Mobile-Robotics-Market-Size-to-Surpass-USD-25-3-Billion-at-a-21-40-CAGR-by-2030-Report-by-Market-Research-Future-MRFR.html
³) "Mobile robot shipments increased by 53% in 2022" https://www.therobotreport.com/mobile-robot-shipments-increased-by-53-in-2022/
4) "Automated Guided Vehicle Systems, State-Of-The-Art Control Algorithms and Techniques" M. De Rycka, M. Versteyhea, F. Debrouwere
5) "What Is SLAM?" https://www.mathworks.com/discovery/slam.html