Roboty MOBOT AGV
| Automaticon 2017 ArtykułyRoboty MOBOT AGV firmy WObit to rozwiązanie, które całkowicie eliminuje konieczność pracy człowieka na określonym odcinku pracy robota. Pomaga zoptymalizować produkcję, tzn. skrócić czas realizacji procesów, ograniczyć koszty i odciążyć pracowników w wykonywaniu ciężkich i monotonnych zadań.


Fot. 1. MOBOT AGV FlatRunner
Roboty MOBOT AGV firmy WObit zostały zaprojektowane, by maksymalnie zwiększyć wydajność produkcji. Budowa robotów pozwala na ich wyposażenie w dowolny wózek transportowy - mogą przewozić palety, kuwety, drobne detale, w zależności od sposobu wykonania wózka.
MOBOT AGV mogą zahaczać wózki samodzielnie, być ładowane ręcznie lub automatycznie za pomocą robota przemysłowego. Po zsynchronizowaniu robota AGV z programem magazynowym lub po wyposażeniu stacji czy maszyn produkcyjnych w odpowiednie czujniki może on być wzywany w pełni automatycznie do wykonania określonego zadania. Zadania te mogą być również zlecane przez człowieka - sposób realizacji zależy od stopnia zautomatyzowania procesów w przedsiębiorstwie.
W skład rodziny robotów MOBOT AGV wchodzi EcoRunner, CubeRunner oraz FlatRunner, dostępny również w wersji HT, która może transportować wózki o masie do 500 kg.

Fot. 2. MOBOT AGV CubeRunner
Roboty MOBOT AGV mogą być wyposażone w system nawigacji oparty o kamerę i śledzenie linii kolorowej lub w czujnik magnetyczny wykrywający taśmę magnetyczną. Roboty są także przystosowane do współpracy z systemami nawigacji opartymi o skanery laserowe, które samodzielnie skanują przestrzeń i określają położenie robota. Zwłaszcza ostatni system nawigacji zasługuje na największe zainteresowanie, ponieważ do prowadzenia robota nie ma potrzeby stosowania jakichkolwiek dodatkowych, zewnętrznych elementów poza obiektami naturalnie występującymi w pomieszczeniu.
Roboty są wyposażone w odpowiednie laserowe skanery przestrzeni z funkcją bezpieczeństwa, zgodne z normą SIL2. W standardzie stosowany jest najbardziej kompaktowy skaner laserowy dostępny na rynku, produkcji firmy Hokuyo. Ze względu na zastosowane skanery bezpieczeństwa, już najbardziej podstawowa konfiguracja pozwala na pracę robota w bezpośrednim kontakcie z ludźmi, zapewniając bezpieczeństwo.
Prócz skanerów bezpieczeństwa roboty są wyposażone w sensorykę, która umożliwia wykrycie wózka ciągniętego przez robota. W przypadku operacji dokowania zastosowany system sensoryczny pozwala na precyzyjne, automatyczne zaczepienie wózka. Funkcjonalność ta w wielu przypadkach umożliwia znaczne zredukowanie kosztów instalacji linii robotycznej, ponieważ w miejscu operacji obsługiwanej przez wiele robotów można zastosować jedno urządzenie dynamicznie wymieniające wózki.

Rys. 1. Oprogramowanie MOBOT RoutePlanner
System napędowy opiera się o wydajne silniki BLDC wyposażone w enkodery o wysokiej rozdzielczości oraz przekładnie o wysokiej precyzji pozwalające na kontrolę ruchu z bardzo dużą dokładnością. W przypadku robotów FlatRunner/HT oraz CubeRunner zastosowany różnicowy system sterowania umożliwia realizowanie obrotu robota wokół własnej osi. Roboty te mogą być wykonane w wersji jednostronnej i dwustronnej. Wersja dwustronna może poruszać się w dwóch kierunkach (przód/ tył) bez konieczności zawracania.
Roboty MOBOT AGV wyposażone są w akumulatory pozwalające na pracę od 8 do 12 godzin, w zależności od obciążenia i jego wykorzystania. Roboty mają możliwość łatwej wymiany akumulatorów, mogą być również wyposażone w system automatycznego ładowania realizowanego podczas postoju. Ze względu na możliwość ładowania prądem o dużym natężeniu, akumulatory ładowane są znacznie szybciej niż powszechnie stosowane rozwiązania.
Praca robota może być kontrolowana za pomocą panelu operatorskiego HMI oraz przycisków umieszczonych na robocie, a także za pomocą specjalnego terminalu łączącego się z AGV bezprzewodowo. W miejscu aplikacji może być zainstalowana dowolna liczba terminali, a także kontrola nad robotem może być prowadzona z wielu miejsc.
OPROGRAMOWANIE
Do szczegółowej konfiguracji parametrów pracy robotów MOBOT AGV służy oprogramowanie MOBOT RoutePlanner. Oprogramowanie pracuje pod kontrolą systemu Windows. Za pomocą interfejsu można realizować takie operacje jak: monitorowanie robota i najważniejszych składowych systemu, konfigurację napędów oraz wejść i wyjść głównego kontrolera, ręczną nawigację pojazdem, a także dodawanie do kontrolera punktów charakterystycznych trasy, w których ma być przeprowadzona konkretna akcja.
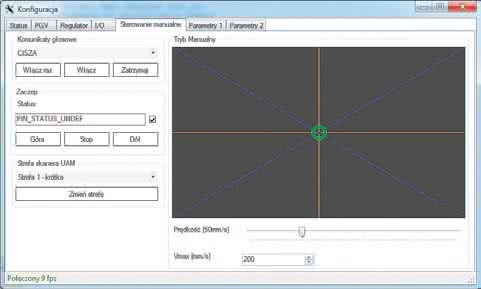
Rys. 2. Okno sterowania manualnego |
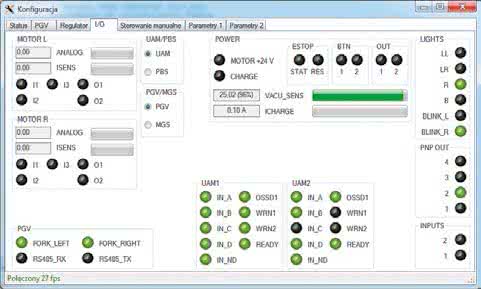
Rys. 3. Okno konfiguracji wejść/wyjść |
Główną część oprogramowania stanowi środowisko pozwalające na zaprogramowanie ruchu robota na określonych odcinkach trasy oraz przydzielanie mu zadań. Program tworzony jest za pomocą prostego języka liniowego. Użytkownik dysponuje szeregiem komend, na podstawie których można tworzyć zaawansowane sekwencje ruchu. Program jest tworzony offline, a następnie przesyłany do robota.

Fot. 3. MOBOT AGV EcoRunner
Za pośrednictwem połączenia Wi-Fi możliwe jest prowadzenie ciągłego monitoringu parametrów maszyny. Jest to bardzo użyteczne, zwłaszcza na etapie wdrażania robota do aplikacji. Co istotne, roboty MOBOT AGV mogą być zintegrowane w większą sieć zarządzaną z poziomu systemu SCADA lub z panelu HMI z punktem dostępu sieci bezprzewodowej.
Zastosowanie robotów z rodziny MOBOT AGV pozwala całkowicie przejąć obowiązki ludzi w obszarze intralogistyki i po zastosowaniu odpowiedniej infrastruktury w postaci np. podajników rolkowych zastąpić tradycyjnie stosowane wózki widłowe. Dodatkowo implementacja robotów AGV ma wpływ na poprawę bezpieczeństwa, wydajności i pozwala w bardzo przejrzysty sposób zaprojektować i zaplanować cykl dostaw w zakładzie produkcyjnym, zarówno w zakresie gospodarki materiałowej, jak i transportu wyrobów gotowych. Aby uzyskać więcej informacji o MOBOT AGV oraz o innych robotach przemysłowych produkowanych przez WObit, zapraszamy na stronę www.wobit.com.pl.
P.P.H. WObit E. K. J. Ober s.c.
www.wobit.com.pl