SIMATIC S7-1500T - Technologia Motion Control od strony praktycznej. Część 3
| TechnikaW kolejnej publikacji z cyklu SIMATIC Motion Control zajmiemy się omówieniem układu pomiarowego serwonapędu. Niniejszy artykuł opisuje konstrukcję oraz najczęściej stosowane technologie pomiaru położenia z wykorzystaniem enkodera inkrementalnego. Zajmiemy się kategoryzacją oraz omówieniem zasad działania poszczególnych typów enkoderów dostępnych powszechnie na rynku, a także możliwościami podłączenia ich do systemu sterowania opartego na sterowniku SIMATIC S7-1500T oraz napędzie SINAMICS.

Pomiar pozycji oraz - wynikających z jej zmian w czasie - parametrów ruchu najczęściej odbywa się przez enkoder cyfrowy. Sporadycznie stosuje się inne elementy pomiarowe, np. resolver (analogowy odpowiednik enkodera) czy tachoprądnicę (pomiar prędkości obrotowej).
W zależności od konfiguracji struktury systemu oraz wymogów aplikacji enkoder podłączony zostanie do przekształtnika częstotliwości lub (w strukturze scentralizowanej) bezpośrednio do sterownika PLC. Oczekiwana rozdzielczość pomiaru oraz jego zakres, dostępność wartości mierzonej w przypadku zaniku napięcia zasilania, a także typ komunikacji - determinować będą wybór odpowiedniego typu enkodera.
ENKODER
Enkoder jest urządzeniem przetwarzającym przesunięcie lub pozycję kątową na sygnał elektryczny. W układach mechanicznych maszyn oraz linii produkcyjnych enkoder pozwala na precyzyjny pomiar prędkości, odległości czy przebytej drogi z uwzględnieniem kierunku ruchu. Jest to podstawowy (najczęściej stosowany) element układu pomiarowego serwonapędu. W zależności od zastosowanej technologii, rodzaju zasilania czy możliwości zapamiętania aktualnej pozycji enkodery dzielimy na inkrementalne oraz absolutne.
ENKODERY INKREMENTALNE
BUDOWA
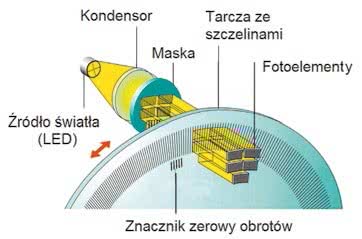
Rys. 1. Budowa enkodera inkrementalnego
Enkoder inkrementalny (zwany również przyrostowym lub impulsowym) jest przetwornikiem generującym impulsy elektryczne określające przyrost kątowy w ruchu obrotowym. Cechą charakterystyczną enkodera inkrementalnego jest stała liczba impulsów na wyjściu, która determinuje dokładność układu pomiarowego. Na rysunku 1 przedstawiono budowę optycznego enkodera inkrementalnego.
ZASADA DZIAŁANIA
Impulsy generowane są przez układ mechaniczny tarczy ze szczelinami, przez które przepuszczane jest światło w kierunku elementów światłoczułych. Obecność szczeliny powoduje oświetlenie fotoelementu, a co za tym idzie wygenerowanie napięcia, które interpretowane jest jako sygnał binarny przez układ elektroniczny.
Alternatywnie stosowane są enkodery wykorzystujące technologię magnetyczną lub pojemnościową. Wybór typu enkodera uwarunkowany będzie dostosowaniem do warunków pracy urządzenia oraz oczekiwanych parametrów pomiaru.
SYGNAŁY WYJŚCIOWE
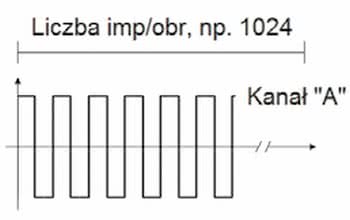
Rys. 2. Kanał wyjściowy A
Zmiana pozycji w ruchu obrotowym powoduje wygenerowanie sygnału elektrycznego, gdzie system nadrzędny (napęd lub sterownik) interpretuje przesłane wartości narastającego zbocza sygnału cyfrowego. Enkoder wyposażony jest w przynajmniej jeden kanał wyjściowy przesyłu informacji A, który ma postać binarną jak na poniższym rysunku 2.
Zazwyczaj jednak kanały wyjściowe są dwa, A oraz B - przesunięte względem siebie o 90°, co przez interpretację kolejności pojawiania się sygnałów - pozwala dodatkowo określić kierunek obrotów wału enkodera. Gdy obraca się wałek enkodera w kierunku zgodnym ze wskazówkami zegara pierwszy pojawi się sygnał A, w kierunku przeciwnym - najpierw odczytane zostanie zbocze sygnału B.
Dodatkowo często spotykamy również trzeci kanał Z, który jest tzw. impulsem zerowym enkodera - generuje on jeden sygnał na pełny obrót w celu zachowania punktu referencyjnego. Wewnętrzny znacznik zerowy wykorzystywany jest również podczas procedury bazowania systemu, o czym szerzej będziemy mówić w kolejnych publikacjach.
Niektóre modele enkoderów inkrementalnych wyposażone są również w sygnały oznaczane jako /A, /B i /Z. Są to sygnały będące negacją wyjść kanałów A, B oraz Z. Ich analiza przez układ elektroniczny pozwala na potwierdzenie poprawności komunikacji. W celu redukcji zakłóceń elektrycznych sygnały te zazwyczaj przesyłane są parami (A+/A, B+/B, Z+/Z) przez skrętkę. Przebieg sygnałów w przypadku bardziej rozbudowanej konfiguracji będzie wyglądał zgodnie z wykresem z rysunku 3.
ROZDZIELCZOŚĆ
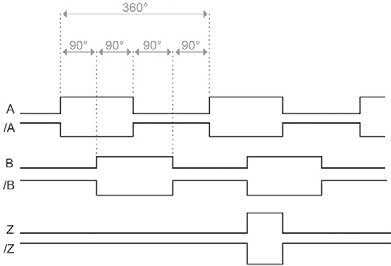
Rys. 3. Przebiegi sygnałów enkodera inkrementalnego
Podstawowym parametrem enkodera inkrementalnego jest jego rozdzielczość. Omówione w powyższej części impulsy wysyłane do systemu nadrzędnego wytwarzane są dzięki konstrukcji mechanicznej enkodera - bezpośrednio odpowiada za nią liczba szczelin na tarczy wewnętrznej urządzenia.
Liczba impulsów generowanych przez układ enkodera na jeden obrót jest ściśle określona dla jego typu. Im większa liczba impulsów tym dokładniejszy pomiar - mniejsza zmiana pozycji obrotowej powoduje powstanie impulsu wyjściowego.
Rozdzielczości enkoderów inkrementalnych zaczynają się od kilkuset impulsów na obrót. Taka dokładność pomiaru zazwyczaj jest wystarczająca - enkodery inkrementalne zazwyczaj stosowane są w układach regulacji prędkości jako impulsatory w układach silników indukcyjnych. Bardziej dokładne pomiary realizowane są w aplikacjach serwo z wykorzystaniem silników synchronicznych - tutaj dokładności enkoderów inkrementalnych sięgają wartości nawet kilkuset tysięcy imp./obrót.
Rozdzielczość układu pomiarowego jest zazwyczaj bezpośrednim przeniesieniem liczby szczelin z wewnętrznej tarczy enkodera. Biorąc jednak pod uwagę możliwości wewnętrznego układu elektronicznego - niektóre enkodery potrafią wykonać programową ewaluację zbocz narastających obu sygnałów (A oraz B), co zwiększy dokładność pomiaru dwukrotnie. Idąc dalej tym tropem - istnieją również enkodery wykonujące analizę zbocz narastających oraz opadających sygnałów A oraz B, co pozwala zwiększyć dokładność elektronicznie czterokrotnie.
Warto również tutaj wspomnieć o enkoderach programowalnych, które - dzięki uniwersalnej konstrukcji oraz interfejsie użytkownika - mogą zostać zaprogramowane w zależności od potrzeb aplikacji. Parametrem programowalnym jest nie tylko liczba impulsów generowanych na obrót wałka, ale również typ wyjścia czy kierunek zliczania impulsów.
Cechy enkoderów inkrementalnych
|
TRANSMISJA DANYCH

Rys. 4. Okablowanie enkodera inkrementalnego
W przypadku enkodera inkrementalnego transmisja danych odbywa się przez wyjścia cyfrowe - niezależnie dla każdego z sygnałów elektrycznych (np. w standardzie RS-422). Ze względu na stałą liczbę linii sygnałowych oraz przesyłane dane (binarne) okablowanie będzie miało zazwyczaj podobną konfigurację. Standardowo będziemy mieli więc zasilanie (np. 24 V, GND) oraz maksymalnie 6 żył do przesyłu sygnałów A, B, Z oraz /A, /B, /Z.
Enkoder inkrementalny nie posiada możliwości zapamiętania pozycji - jest to jego właściwość, która zasadniczo odróżnia go od enkodera absolutnego. W zawiązku z powyższym zanik napięcia zasilania pociąga za sobą utratę pozycji aktualnej, a co za tym idzie konieczność bazowania systemu mechanicznego (np. na podstawie sygnału zewnętrznego z wyłącznika krańcowego lub wewnętrznego sygnału zerowego enkodera).
RODZAJE WYJŚĆ ENKODERÓW
Mechaniczna część enkodera w zależności od zastosowanej technologii (optyczna, pojemnościowa czy magnetyczna) służy konwersji ruchu obrotowego na sygnał impulsowy. Część elektroniczna z kolei to konwerter sygnału na cyfrowy standard komunikacyjny. W przypadku enkoderów inkrementalnych najczęściej spotykane to RS-422 (TTL) oraz Push-Pull (HTL).
TTL

Rys. 5. Przetwarzanie sygnału przez enkoder SIN/COS
Wyjście enkodera w standardzie TTL (RS-422) ma wartość napięcia w przybliżeniu 5 VDC (minimalnie 3V dla logicznej "1" oraz maksymalnie 0,5 V dla logicznego "0"). Napięcie wyjścia nie jest zależne od poziomu napięcia zasilania. Zasilanie enkodera może być dostarczone w dwóch standardach: 4,75-5,5 VDC lub 8-30 VDC. Niezależnie od opcji zasilania, wyjście pozostaje zgodnie ze standardem elektrycznym RS-422.
Wyjście TTL zapewnia stosunkowo wysoką częstotliwość odpowiedzi układu oraz bardzo dobrą odporność na zakłócenia. Standard TTL (Transistor-Transistor Logic) bierze nazwę od roli tranzystorów - w takim układzie cyfrowym zarówno funkcje logiczne (np. AND/OR), jak i wzmocnienie sygnału realizowane są przez tranzystory (w przeciwieństwie do układów typu RTL czy DTL).
HTL
Wyjście enkodera w standardzie HTL (Push-pull) ma wartość napięcia proporcjonalną do poziomu napięcia zasilania (minimalnie 3V dla logicznej "1" oraz maksymalnie 0,5 V dla logicznego "0"). Standardowo napięcie zasilające znajduje się w przedziale od 8 do 30 VDC. Struktura HTL (High Threshold Logic) jest odmianą układu diodowo-tranzystorowego (RTL - poprzednik TTL), gdzie funkcje logiczne (np. AND/OR) realizowane są przez sieć rezystorów, natomiast wzmocnienie przez tranzystory.
Wysoki próg (High Threshold) oznacza tutaj rozbieżność pomiędzy interpretacją poziomu sygnału wejściowego jako wartość logiczną 0 lub 1. Dzięki temu zyskujemy bardzo wysoką odporność na zakłócenia, tracimy jednak na prędkości wymiany informacji, zwiększony jest również pobór energii.
SIN/COS
SIMATIC S7-1500/ET200MP
W obszarze rodziny enkoderów inkrementalnych znajdują się również urządzenia, które mają bardziej zaawansowaną metodę cyfrowego przetwarzania sygnału pozyskanego z układu mechanicznego. Enkodery inkrementalne SIN/COS pozyskują sygnał elektryczny podobnie jak te opisane w poprzedniej sekcji - mechaniczna część pozostaje bez zmian.
Zachodzi jednak różnica w zakresie przetwarzania sygnału impulsowego. Konkretnie jest on w przypadku tego typu urządzeń konwertowany na funkcję sinus (sygnał A) oraz cosinus (sygnał B). Konwersja odbywa się dzięki analizie czasu zmiany stanów sygnałów A/B.
Następnie w zakresie jednego okresu funkcji trygonometrycznych zachodzi konwersja z próbkowaniem charakterystycznym dla danego układu elektronicznego. Przykładowo - załóżmy, że mamy optyczny enkoder inkrementalny z tarczą mającą 2048 szczelin. 2048 impulsów sygnału A (B) zostaje więc konwertowane na 2048 faz funkcji okresowej sinus (cosinus).
Załóżmy również, iż w jednym okresie funkcji trygonometrycznej przetwornik analogowo/cyfrowy będzie w stanie wygenerować 2048 jednoznacznych stanów zależności funkcji sinus/cosinus. W związku z powyższym uzyskamy dokładność na wyjściu enkodera na poziomie 4 milionów impulsów na obrót.
Wyjściem enkodera typu SIN/COS może być sygnał impulsowy gotowy do przetworzenia w układzie sterownia lub analogowy sygnał SIN/COS, który konwertowany będzie dopiero po stronie systemu automatyki.
POŁĄCZENIE Z SYSTEMAMI SIMATIC/SINAMICS

SIMATIC ET200SP
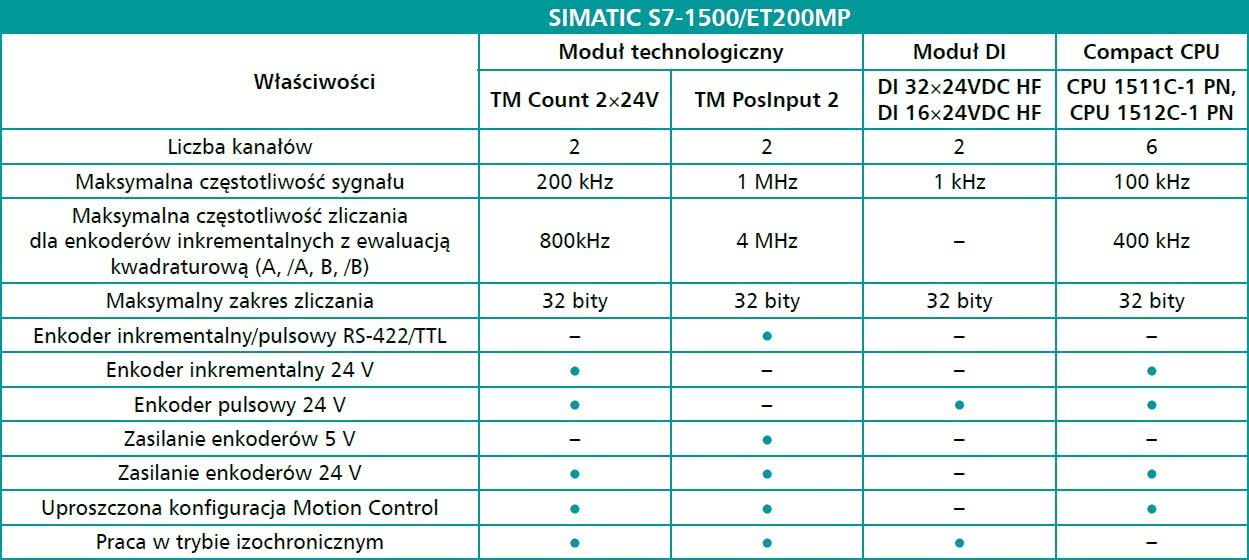
Elementy sterowania SIMATIC można wyposażyć w moduły dedykowane dla połączeń urządzeń pomiarowych dla systemów Motion Control. Enkoder inkrementalny może zostać połączony, np. ze sterownikiem S7-1200/1500 lub rozproszonymi jednostkami wejść/wyjść ET200SP/MP. Poniżej przedstawione zostały moduły, które można wykorzystać oraz ich podstawowe parametry.
SIMATIC S7-1200
Jednostki centralne sterowników S7-1200 mają zintegrowane szybkie wejścia (6xHSC), które mogą zostać wykorzystane jako wejścia do podłączenia enkoderów inkrementalnych - maksymalna częstotliwość zliczania 100 kHz. Jednostka centralna pozwoli również zasilić enkodery 24 V. Sterownik nie wspiera pracy w trybie izochronicznym. Nie ma również możliwości obsługi enkodera przez obiekt technologiczny.
SINAMICS
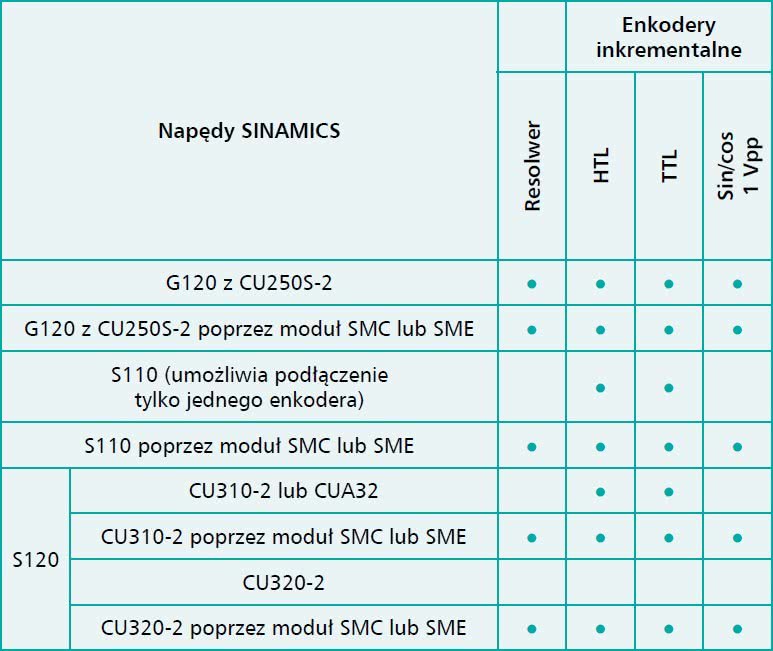
Podłączenie enkodera inkrementalnego do przekształtnika częstotliwości SINAMICS jest możliwe zarówno dla rodziny G120, jak i dla serwonapędów V90 (enkodery dedykowane) lub S1x0. W zależności od konfiguracji sprzętowej wspierane są enkodery inkrementalne typu HTL, TTL oraz SIN/COS, a także z interfejsami sieciowymi lub DRIVE-CLiQ, o czym napiszemy w kolejnych publikacjach.
|
Informacje zawarte w tabeli są ogólnym opisem obsługiwanych przez poszczególne jednostki sterujące CU enkoderów inkrementalnych. Dokładne dane odnośnie do możliwości łączenia enkoderów znajdują się w dokumentach technicznych dostępnych do pobrania ze strony: https://support.industry.siemens.com/ W razie pytań lub wątpliwości zapraszamy również do bezpośredniego kontaktu ze wsparciem technicznym techniki napędowej: automatyka.pl@siemens.com. |
Zapraszamy do lektury kolejnego numeru, w którym zajmiemy się omówieniem układów pomiarowych opartych o enkodery absolutne, czyli takie, które nie tylko umożliwiają pomiar zmiany położenia, ale również pozwalają trwale go zapamiętać oraz odczytać bezpośrednio po uruchomieniu systemu.
Siemens
www.automatyka.siemens.pl