Zastosowanie techniki mikrokroków w sterowaniu silnikami krokowymi
| TechnikaSilniki krokowe to popularne elementy maszyn, przenośników, manipulatorów i niewielkich robotów. Są one również wykorzystywane w wielu zastosowaniach w motoryzacji czy przykładowo elektronice. Impulsy sterujące powodują obrócenie się wirnika o określony kąt, pozwalając na precyzyjną pracę urządzenia, w którym znajduje się silnik. Coraz częściej jednak dla zapewnienia gładkiego obrotu, czyli w celu zmniejszenia kątów dla pojedynczych kroków, stosuje się technikę mini- lub mikrokoków.

Mikrokroki to technika oparta na działaniu wielofazowym, wykorzystującym podział każdego kroku na kilka jednakowych "podkroków". W przeciwieństwie do trybu równoczesnego wzbudzania dwóch par biegunów (tryb kroków pełnych), w którym natężenia prądów w obwodach dwóch par biegunów muszą być jednakowe, w trybie mikrokrokowym prądy te są różne. Kontrola względnych natężeń prądów pozwala umiejscowić wirnik w dowolnej pozycji między krokowymi pozycjami każdej z dwóch sąsiednich par biegunów.
SILNIK KROKOWY
Na rysunku 1 pokazano w uproszczonej formie silnik krokowy (skokowy). Ma on stojan z dwoma parami biegunów, których uzwojenia tworzą wspólne obwody prądowe oraz dwubiegunowy wirnik z magnesami trwałymi. Sterowanie tym silnikiem w trybie pełnokrokowym wymaga sygnałów skojarzonych w sposób pokazany na rysunku 2. Obwody obu biegunów są aktywne równocześnie.
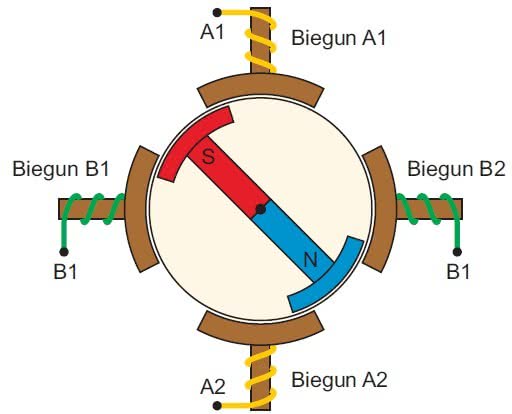
Rys. 1. Silnik krokowy o dwóch parach biegunów stojana i dwubiegunowym wirniku z magnesów trwałych; uzwojenia biegunów A1 i A2 (żółte) tworzą jeden wspólny obwód, a biegunów B1 i B2 (zielone) drugi obwód |
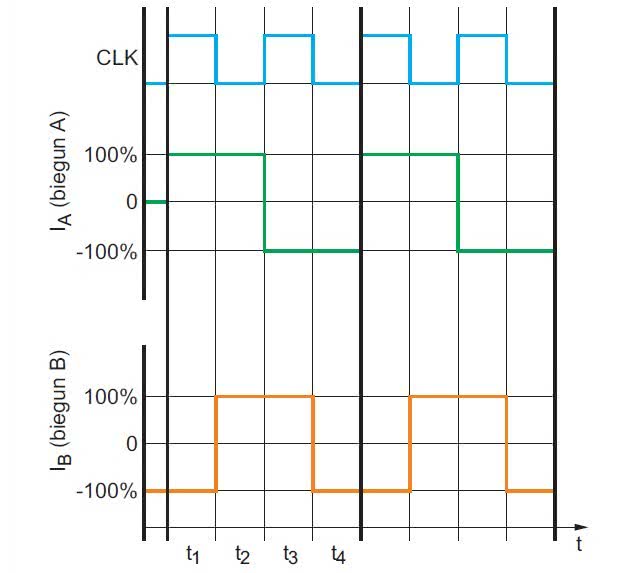
Rys. 2. Pełnokrokowy tryb pracy silnika z rysunku 1 przy równoczesnym pobudzaniu dwóch par biegunów stojana |
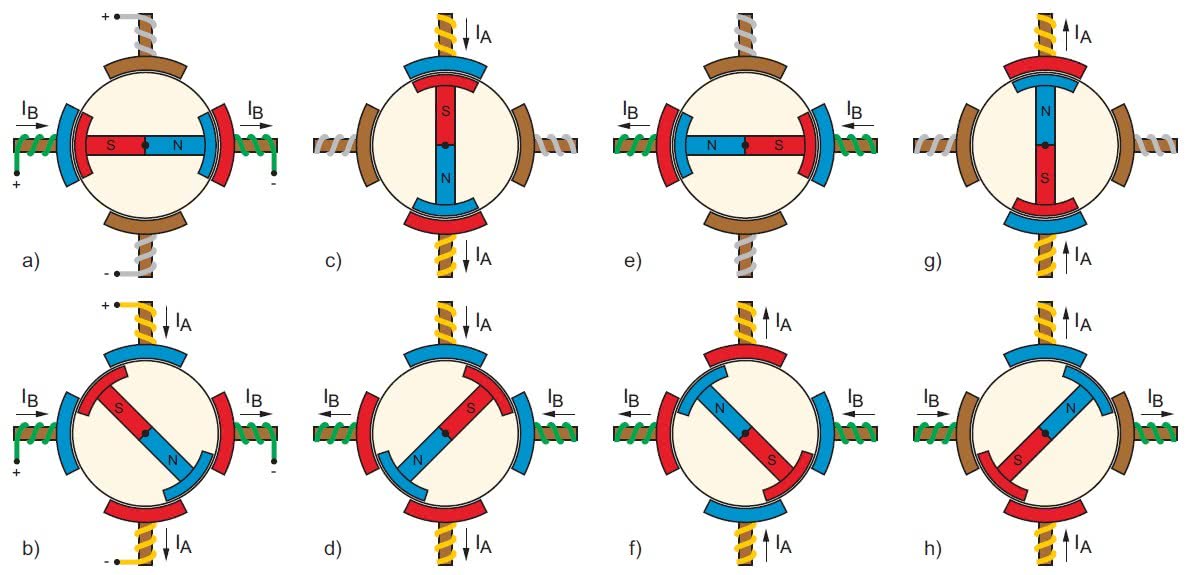
Dwa sąsiadujące bieguny stojana mają zawsze tę samą polaryzację, co zwiększa siłę wywieraną na magnesy wirnika. Ponieważ każdy biegun wirnika jest zawsze przyciągany przez dwa bieguny stojana, wirnik ustawia się pośrodku biegunów, o ile natężenia prądu w obwodach A i B są jednakowe. Rysunek 3 pokazuje pełen cykl jednego obrotu silnika krokowego z czterema biegunami stojana i dwubiegunowym wirnikiem z magnesów trwałych w trybie pełnokrokowym.
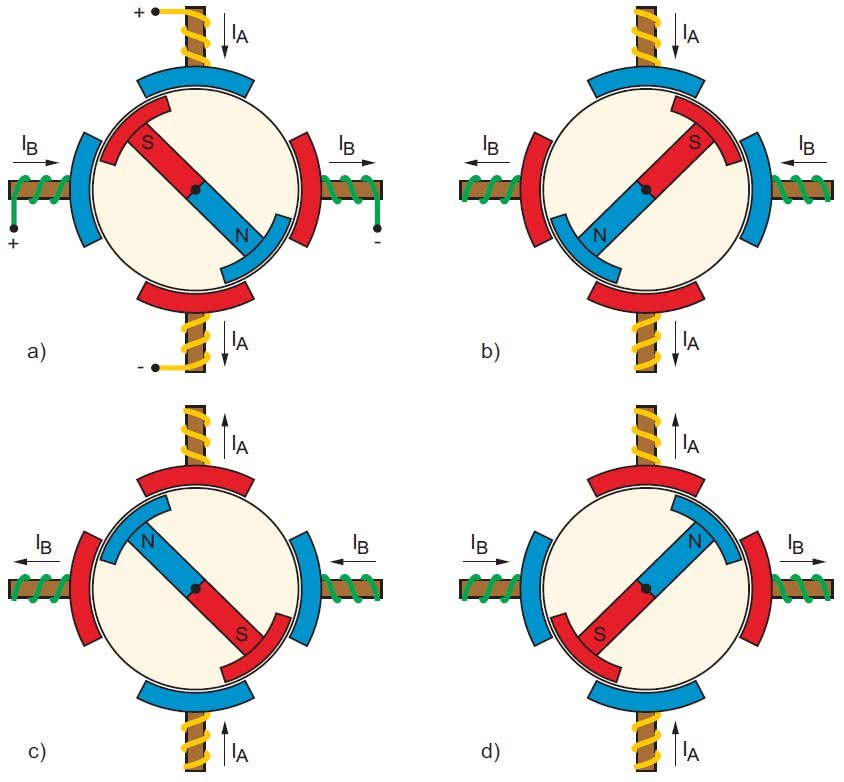
Rys. 3. Pełny cykl obrotu silnika o dwóch parach biegunów stojana i dwubiegunowym wirniku z magnesami trwałymi w trybie równoczesnego pobudzania dwóch par biegunów; zółte przewody jednej pary biegunów i zielone drugiej pary są połączone we wspólne obwody |
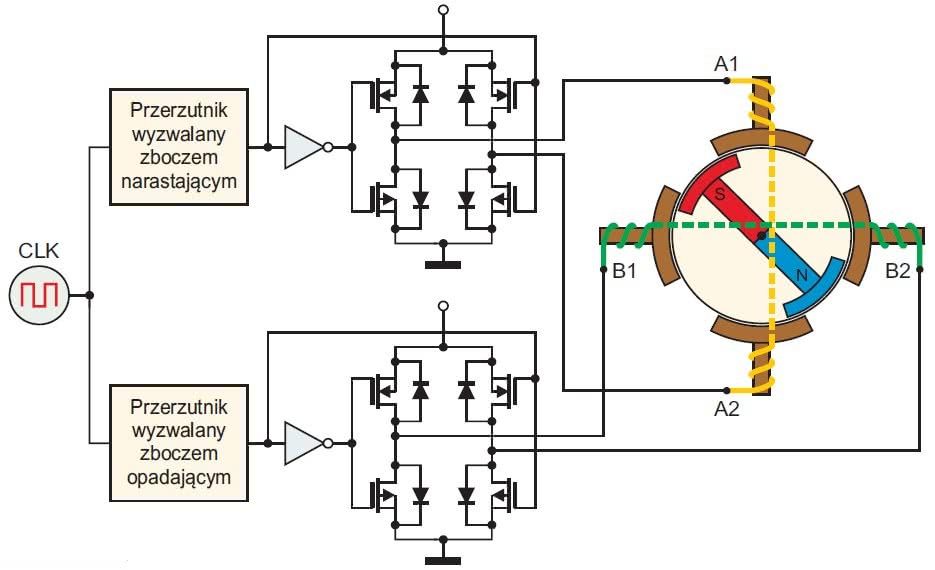
Rys. 4. Silnik krokowy z pełnokrokowym trybem pobudzania za pośrednictwem dwóch par biegunów stojana równocześnie |
Do wspólnej aktywacji i dezaktywacji biegunów A i B z rysunku 2 potrzebny jest jeden impuls zegarowy. Sygnał ten musi wyzwalać narastającym zboczem prąd IA, a opadającym zboczem prąd IB. W układzie pokazanym na rysunku 4 jest to realizowane za pomocą przerzutników. Przerzutnik wyzwalany zboczem narastającym sygnału zegarowego przełącza prąd IAMIN na IAMAX, a przerzutnik wyzwalany zboczem opadającym przełącza prąd IBMIN na IBMAX.
ZWIĘKSZANIE DOKŁADNOŚCI PRACY
 Pełnokrokowy tryb wzbudzania dwóch par biegunów nie nadaje się do aplikacji wymagających dużej rozdzielczości kątowej pozycji wirnika. Większą rozdzielczość daje się osiągnąć za pomocą bardziej złożonego układu sterowania przerzutnikami, którego schemat blokowy jest przedstawiony na rysunku 5.
Pełnokrokowy tryb wzbudzania dwóch par biegunów nie nadaje się do aplikacji wymagających dużej rozdzielczości kątowej pozycji wirnika. Większą rozdzielczość daje się osiągnąć za pomocą bardziej złożonego układu sterowania przerzutnikami, którego schemat blokowy jest przedstawiony na rysunku 5.
Częstotliwość sygnału zegarowego jest w tym przypadku jednakowa dla wszystkich trybów wzbudzania. Sterujące układy logiczne A i B wytwarzają sygnały pozwalające zmienić kątową szerokość kroków wirnika. Układy te zmieniają napięcie wejściowe mostków H-A i H-B wraz z każdym rosnącym zboczem cyklu.
Kształt sygnałów wyjściowych układów logicznych A i B wprowadzanych do mostków H-A i H-B zależy od wybranego trybu wzbudzania. Od sygnałów tych zależą natężenia prądów IA i IB wyznaczające wielkości kątów pośrednich położeń wirnika pomiędzy dwoma biegunami o jednakowej polaryzacji.
Tryb wzbudzania sygnałem zegarowym za pośrednictwem dwóch par biegunów stojana, pokazany na rysunku 6, wymaga czterech impulsów zegara na pełny obrót wirnika. Daje się to zaobserwować również na rysunku 3, ilustrujący podział jednego obrotu na cztery kroki.
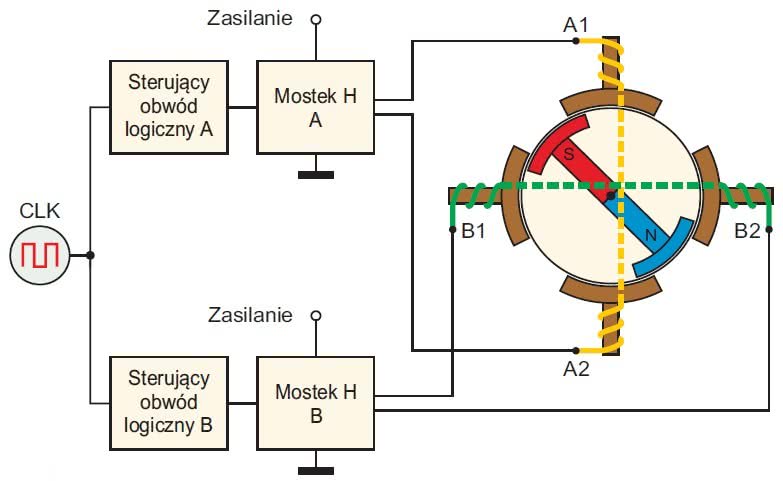
Rys. 5. Uproszczony schemat blokowy układu sterującego silnik mikrokrokami |
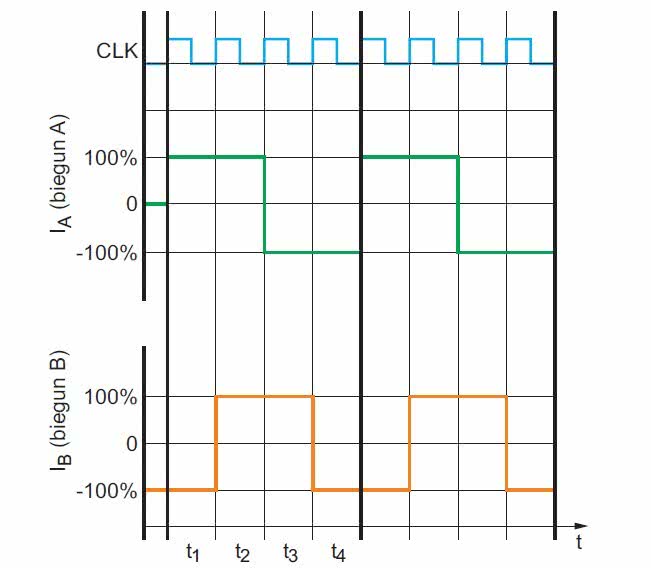
Rys. 6. Tryb wzbudzania silnika sygnałem zegarowym za pośrednictwem dwóch par biegunów stojana równocześnie |
PODZIAŁ KROKÓW
Precyzję obrotów wirnika można zwiększyć, dzieląc każdy krok na dwie części. Powstaje w ten sposób dodatkowa, pośrednia pozycja wirnika, w której ustawia się on w osiach par biegunów stojana. Pełny obrót wirnika w tym trybie wzbudzania składa się z ośmiu kroków, przedstawionych na rysunku 7. Z kolei na rysunku 8 pokazano natężenia prądu zmieniane skokowo standardowym sygnałem zegara w ośmiu fazach cyklu.
Rys. 7. Pełny cykl pracy silnika krokowego w trybie pobudzania na przemian jedną parą biegunów i dwoma parami biegunów; żółte przewody jednej pary biegunów i zielone przewody drugiej tworzą wspólne obwody, kolor szary oznacza brak przepływu prądu, kolorem czerwonym oznaczone są bieguny S magnesów, kolorem niebieskim bieguny N magnesów, a kolorem brązowym magnesy niespolaryzowane |
Oczywiście czas jednego pełnego obrotu wirnika w trybie naprzemiennego wzbudzania jednej lub dwóch par biegunów jest dwukrotnie dłuższy niż w trybie wzbudzania równoczesnego. Na rysunku widać również, że natężenia prądów IA i IB w czasie pośredniego kroku wynoszą około 75% wartości maksymalnej. Przy poborze prądu o większym natężeniu, nieprzeciążającym zasilacza, siła wirnika zostaje zwiększona. W skrajnym przypadku natężenia prądów IA i IB w fazie pośredniej mogą zostać zwiększone do 100%.
Dalsze zwiększenie rozdzielczości kątowej wirnika jest możliwe po wprowadzeniu dodatkowych kroków pomiędzy wzbudzeniem jednej pary a wzbudzeniem dwóch par biegunów. Taki tryb pracy silnika można nazwać trybem zróżnicowanego udziału sąsiednich par wzbudzanych biegunów. Na rysunku 9 pokazano przebieg zmian prądów biegunów A i B w pełnym cyklu obrotu wirnika silnika pracującego w tym trybie.
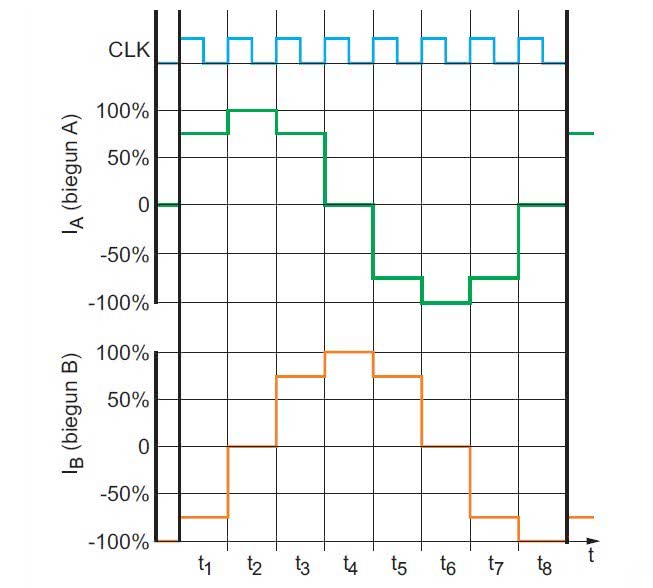
Rys. 8. Tryb pobudzania silnika jedną i dwoma parami biegunów standardową częstotliwością |
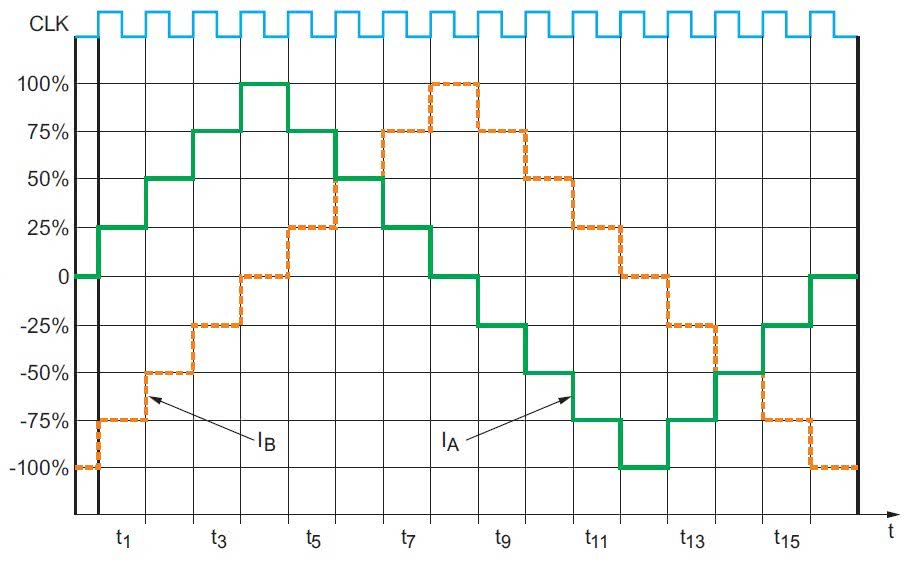
Rys. 9. Tryb pobudzania standardową częstotliwością zegarową ze zróżnicowanym udziałem sąsiednich par biegunów |
Z każdym narastającym zboczem zegara zostaje ustalone nowe natężenie prądów IA i IB. Liczba 16 impulsów zegarowych, przypadających w tym trybie na pełen obrót wirnika, jest dwukrotnie większa od 8 w trybie zwykłym. Wirnik potrzebuje dwa razy dłuższego czasu na wykonanie jednego obrotu, ale jego ruch staje się bardziej gładki i mniej hałaśliwy, a rozdzielczość kątowa wzrasta.
Zwiększanie liczby pozycji pomiędzy dwoma sąsiednimi parami biegunów osiąga się, nadając natężeniom prądu IA i IB odpowiednio dobrane pośrednie wartości z przedziału od 0 do 100%, tak aby wirnik był kątowo ustawiany w odpowiednich pozycjach pomiędzy biegunami. Jest to bardzo użyteczne w aplikacjach wymagających silnika krokowego o dużej rozdzielczości kątowej, obracającego się cicho i gładko.
KKP