Poprawne sterowanie oraz regulacja w układach z bezszczotkowymi silnikami prądu stałego to ważny aspekt wielu współczesnych systemów automatyki. Rozwiązania tego typu są istotne są również w przypadku wykorzystania wentylatorów, np. w szafach sterowniczych. W artykule przedstawiamy krok po kroku tworzenie zaawansowanego układu regulacji.
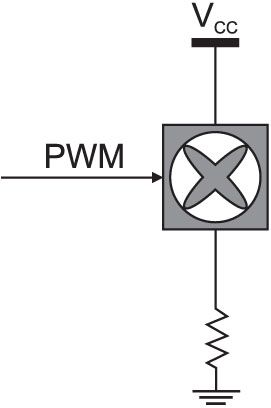
Rys. 1. Wentylator sterowany trójprzewodowo
Podczas projektowania układów z wentylatorami (i ogólnie układami z silnikami prądu stałego) ich projektanci często zmagają się z takimi problemami, jak dokuczliwy hałas i drgania obudowy. Na działanie wentylatora wpływa aerodynamiczny kształt łopatek wiatraka, cechy mechaniczne i elektryczne silnika oraz wiele innych czynników. O ile projektant maszyny nie jest zwykle w stanie wpłynąć na cechy mechaniczne wykorzystywanych silników, można wiele zyskać stosując odpowiedni do danego zastosowania układ regulacji.
Najprostsze rozwiązania
Na rynku dostępnych jest wiele rodzajów wentylatorów, wśród których duża część wyposażona jest w dosyć rozbudowane układy sterujące. Aby zrozumieć działanie tych najbardziej złożonych, najłatwiej zacząć od prostego układu przedstawionego na rys. 1. Tego typu wentylator ma dwa przewody zasilania oraz wejście PWM sterujące jego prędkością obrotową. Jest to dosyć proste rozwiązanie, gdyż do sterowania szerokością impulsów wystarczy w praktyce nieskomplikowany układ elektroniczny.
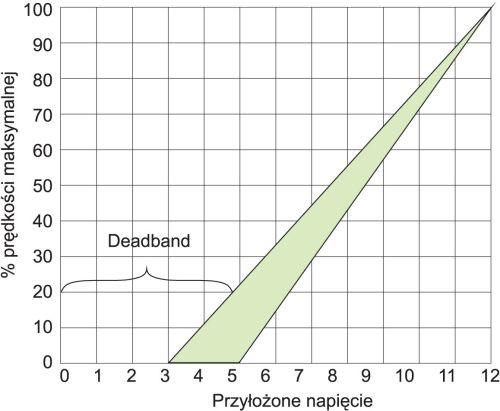
Rys. 2. Zależność prędkości obrotów bezszczotkowego silnika prądu stałego od przyłożonego napięcia
Rozwiązanie takie byłoby idealne, gdyby istniała liniowa zależność pomiędzy współczynnikiem wypełnienia sygnału na wejściu, a prędkością obrotową wiatraka, gdzie współczynnikowi wypełnienia równemu 100% odpowiadałaby maksymalna prędkość obrotu. Rzeczywista zależność została przedstawiona na rys. 2. Bezszczotkowy silnik prądu stałego zaczyna obracać się w momencie, gdy wartość napięcia zasilającego osiągnie pewien poziom, który nie jest precyzyjnie określony. Prędkość obrotów tylko w przybliżeniu liniowo zależy od amplitudy przyłożonego napięcia i nawet przy stałej jego wartości zmienia się w czasie pracy. W efekcie tych zjawisk nawet małe wahania prędkości obrotów mogą spowodować powstawanie niepożądanych hałasów i wibracji obudowy. Wspomniane wcześniej parametry – czyli napięcie, przy którym silnik zacznie się obracać oraz zależność prędkości od napięcia są charakterystyczne dla konkretnego silnika, jak również czasu i warunków jego pracy.
Trochę dokładniej
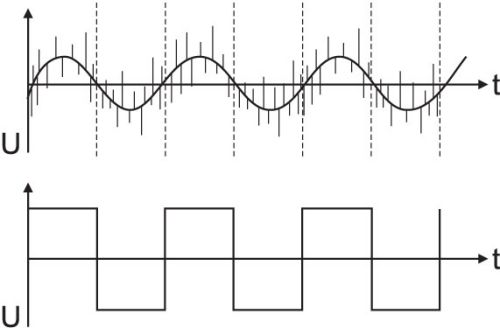
Rys. 3. Porównanie rzeczywistych i oczekiwanych przebiegów sygnału sterującego
W celu uzyskania precyzyjnej regulacji obrotów wentylatora wprowadza się pętlę sprzężenia zwrotnego, dzięki której możliwa jest korekcja wahań wynikających z niedoskonałości silnika napędzającego wiatrak. Do układu z rys. 1. dodany jest układ pełniący rolę tachometru mierzącego rzeczywiste obroty silnika. Kontroler tworzący ciąg impulsów sterujących porównuje zmierzoną prędkość obrotu wiatraka z prędkością zadaną przez układ sterujący i na tej podstawie dokonuje korekty obrotów.
Zbadanie rzeczywistego przebiegu sygnału sterującego pracą silnika może być z łatwością przeprowadzone poprzez zmierzenie spadku napięcia na rezystorze podłączonym szeregowo z wentylatorem. Silniki prądu stałego sterowane są napięciem o kształcie prostokątnym i takiego przebiegu, zgodnie z teorią, należałoby się spodziewać w przypadku próbkowanego sygnału. W rzeczywistości jednak sygnał sterujący przypomina bardziej sinusoidę, niż prostokąt, a w dodatku zawiera wiele szumów o wysokiej częstotliwości. Można to zauważyć na rys. 3, gdzie porównane są rzeczywiste i oczekiwane przebiegi napięć na wejściu sterującym.
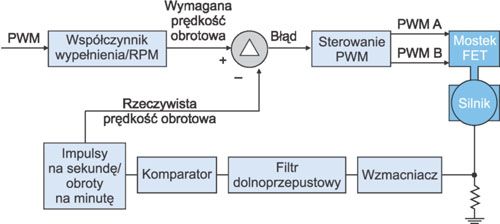
Rys. 4. Podstawowy układ kontrolujący prędkość obrotów wentylatora
Aby uzyskać użyteczny dla układu sterującego przebieg prostokątny, uzyskany sygnał należy poddać pewnej obróbce. Na wstępie jednak trzeba odpowiednio dobrać wielkość rezystora próbkującego ten sygnał. Spadek napięcia na rezystorze będzie powodował jednak straty energii oraz zmniejszanie wartości napięcia przyłożonego do zacisków silnika. Zwiększanie napięcia sterującego będzie skutkowało większym zużyciem energii. Z powyższych względów konieczne jest stosowanie rezystora o małej wartości, a co za tym idzie wzmacniacza operacyjnego, który pozwoli na konwersję amplitudy sygnału zwrotnego do użytecznych wartości.
Kolejnym po wzmacniaczu operacyjnym elementem pętli zwrotnej jest układ odfiltrowujący szumy powstające podczas pracy silnika. Szumy to widoczne na wykresie czasowym impulsy szpilkowe o wysokiej częstotliwości. Dzięki prostemu filtrowi dolnoprzepustowemu RC można łatwo się ich pozbyć z sygnału użytecznego, który na kolejnym etapie poddawany jest dalszej obróbce. Polega ona na digitalizacji wcześniej uzyskanej "sinusoidy". To zadanie może zostać zrealizowane w dwojaki sposób. Pierwszy z nich polega na zastosowaniu oddzielnego kontrolera wyposażonego w przetwornik analogowo-cyfrowy, który próbkuje badany sygnał i zapisuje w postaci cyfrowej. Drugi jednak sposób wydaje się być prostszym i mniej kosztownym rozwiązaniem. Wystarczy zastosować komparator zrealizowany na wzmacniaczu operacyjnym, którego wyjście przyjmuje wartość zera lub jedynki logicznej w zależności od amplitudy sygnału. W efekcie układ ten pełni rolę jednobitowego przetwornika analogowo-cyfrowego eliminując tym samym konieczność stosowania bardziej skomplikowanych rozwiązań.
Rys. 6. Układ sterujący z układem różniczkującym
Po przejściu sygnału przez układy wzmacniacza, filtra i komparatora uzyskuje się przebieg prostokątny pokazany na dole rysunku 3. Tak uzyskany sygnał dostarcza informacji o liczbie impulsów na jeden obrót silnika. Wartość tę należy przeliczyć na RPM, czyli liczbę obrotów na minutę. Liczba impulsów na obrót wynika wprost z liczby biegunów danego silnika, a przeliczenie realizowane jest dzięki zastosowaniu układów licznika i timera. Tym sposobem otrzymuje się układ przedstawiony na rys. 4. Zgodnie z wcześniejszymi założeniami jest to układ, który będzie w stanie na bieżąco kontrolować pracę wentylatora, niwelując tym samym różnicę między rzeczywistą, a zadaną prędkością obrotów.
Dlaczego to nie działa?
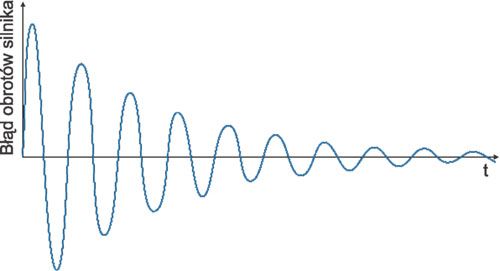
Niestety zaprojektowany układ w praktyce nie spełnia postawionych założeń. Obserwacja błędu proporcjonalnego wartości obrotów (rozumianego jako różnica między zadaną a rzeczywistą prędkością obrotów wentylatora) wskazuje na oscylacyjny charakter sygnału na wyjściu. Układ regulacji w efekcie ciągłych prób uzyskania punktu równowagi powoduje powstawanie błędu o przeciwnym znaku. W efekcie uzyskamy niedotłumione oscylacje układu, co przedstawiono na rys. 5.
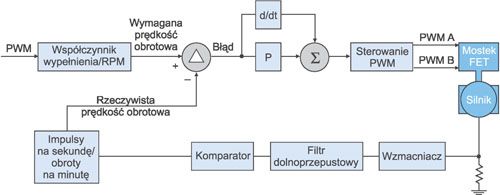
W celu rozwiązania tego problemu może być zastosowany układ różniczkujący, który pozwala na określenie zmiany błędu w jednostce czasu. W praktyce gdy błąd ma dużą wartość, układ sterujący wymusza dużą zmianę w prędkości obrotów. Po chwili, gdy błąd zmaleje, układ korygujący dąży do spowolnienia zmiany prędkości w jednostce czasu. Zastosowanie układu różniczkującego ma na celu kontrolowanie zmian błędu i niedopuszczenie zmiany znaku błędu na przeciwny. Obydwa sygnały sterujące – różniczkujący i proporcjonalny, wynikający z różnicy między oczekiwaną i rzeczywistą prędkością obrotu, są sumowane z odpowiednimi wagami przed przetworzeniem ich na sygnał PWM sterujący obrotami silnika.
Rys. 8. Kompletny układ sterujący prędkością obrotów wentylatora
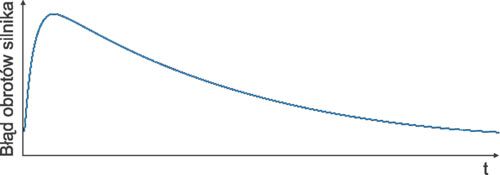
Niestety w tym przypadku może pojawić się kolejny problem – sygnał błędu może zostać przetłumiony, to znaczy jego wartość nigdy nie osiągnie zera, co zostało przedstawione na rysunku 7.
Wtedy swoje zadanie znakomicie spełni układ integratora, którego zadaniem jest całkowanie sygnału błędu po czasie. Kiedy błąd będzie miał tendencję do ustalenia się na określonym poziomie różnym od zera, układ integrujący będzie mógł z dużą dokładnością wymusić zmniejszenie błędu. Wszystkie trzy sygnały – proporcjonalny, z układu całkującego oraz różniczkującego są sumowane z odpowiednimi wagami. Ustalenie tych wag ma decydujące znaczenie dla właściwości całej pętli regulacji i wpływa na szybkość oraz sposób tłumienia zmian prędkości.
Przedstawiony na rys. 8 kompletny układ sterujący wentylatora powinien charakteryzować się natychmiastowymi, a zarazem łagodnymi reakcjami na wahania prędkości obrotów. Przebieg sygnału błędu powinien mieć charakter oscylacji krytycznie tłumionej przedstawionej na rys. 9.
Odpowiednia regulacja to duże korzyści
Rys. 9. Krytycznie tłumione wartości błędu obrotów
Dzięki odpowiednio zaprojektowanemu układowi zamkniętej pętli regulującej prędkość obrotów wentylatora można wyeliminować wspomniane na wstępie problemy wynikające z niedoskonałości silników prądu stałego, w tym zredukować hałas i wibracje. System regulujący pracę wentylatora może zostać zrealizowany z wykorzystaniem wielu rodzajów układów – począwszy od FPGA i procesorów numerycznych, proste mikrokontrolery, kończąc na układach komparatorów i wzmacniaczy operacyjnych, które mogą równie dobrze radzić sobie ze sterowaniem pracą silnika. Oczywiście zastosowanie typowego regulatora PID jest również możliwe.