Resolwery są używane od czasów II wojny światowej, kiedy były instalowane głównie w aplikacjach militarnych. Przetworniki te, określane też jako transformatory położenia kątowego, są zaprojektowane w taki sposób, by zachować funkcjonalność nawet w trudnych warunkach otoczenia (wysokie temperatury, wibracje, zapylenie). Dlatego od lat sprawdzają się także w przemyśle.
Czym jest Resolwer
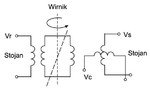
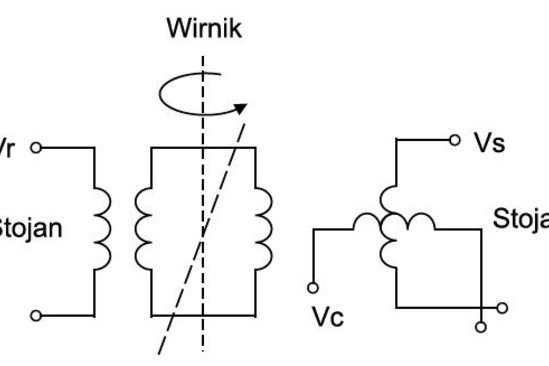
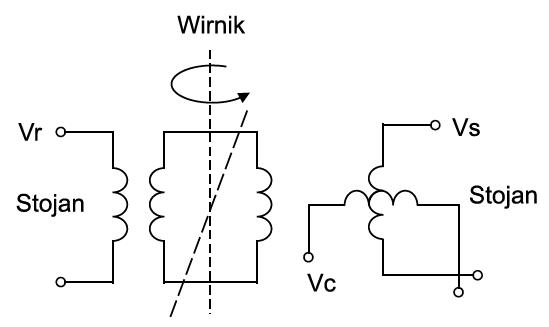
Rys. 1 Schemat resolwera
Resolwer w tradycyjnym wykonaniu składa się z uzwojonego wirnika i stojana. Uzwojenia wirnika wytwarzają zmienne pole magnetyczne, które indukuje napięcie w dwóch uzwojeniach stojana, które są względem siebie przesunięte o 90°. Napięcia indukowane w tych uzwojeniach są proporcjonalne do sinusa i kosinusa kąta obrotu (θ). W bezszczotkowych resolwerach stosuje się obrotowy transformator, który przekazuje energię między stojanem i wirnikiem. Eliminuje to szczotki i pierścienie ślizgowe oraz związane z nimi problemy. Uzwojenie pierwotne tego transformatora jest umieszczone na stojanie, natomiast uzwojenie wtórne – na wirniku (rys. 1).
Pomiar absolutny
Jeżeli napięcie doprowadzone do uzwojenia pierwotnego opisuje zależność: Vr=sin(ωt), to napięcia w uzwojeniach wtórnych wynoszą odpowiednio: Vs=Vr·tr·sin(θ) i Vc=Vr·tr·cos(θ). Współczynnik tr jest tzw. współczynnikiem transformacji resolwera i typowo wynosi 0,5. Każdemu kątowi przypisana jest jednoznaczna para wartości sinusa i kosinusa. Dlatego resolwer w przypadku obrotu o 360° dostarcza informacji o bezwzględnej pozycji wirnika. Jest to jedna z zasadniczych zalet tych przetworników np. w porównaniu do enkoderów inkrementalnych.
Przetwarzenie R/D
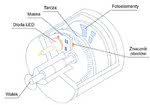
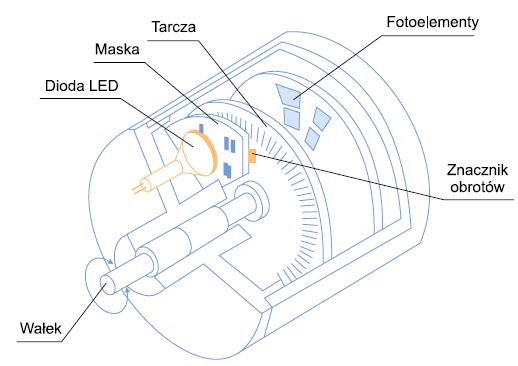
Rys.2 Główne elementy enkodera optycznego
Sygnałem wyjściowym resolwera jest sygnał analogowy, który wymaga przetworzenia do postaci cyfrowej. Dlatego niezbędnym elementem systemów z resolwerami są moduły przetworników R/D (ang. resolver to digital), które determinują rozdzielczość całego układu resolwera. W przetwornikach R/D powszechnie wykorzystuje się tzw. metodę śledzenia kąta.
Jak przetwornik R/D wyznacza kąt ?
Przetworniki R/D typu śledzącego bazują na trygonometrycznej zależności: sin(θ‒δ)=sinθ·cosδ‒cosθ·sinδ. Jeżeli różnica między kątami θ‒δ jest odpowiednio mała można, przyjąć następujące przybliżenie: sin(θ‒δ) = θ‒δ. Układ R/D implementuje powyższe równanie, śledząc wartość kąta θ przez jej porównywanie ze wstępnie założoną wartością kąta δ. Oba sygnały wyjściowe resolwera (proporcjonalne do sinusa i kosinusa kąta θ) są mnożone przez odpowiednie wartości funkcji kąta δ.

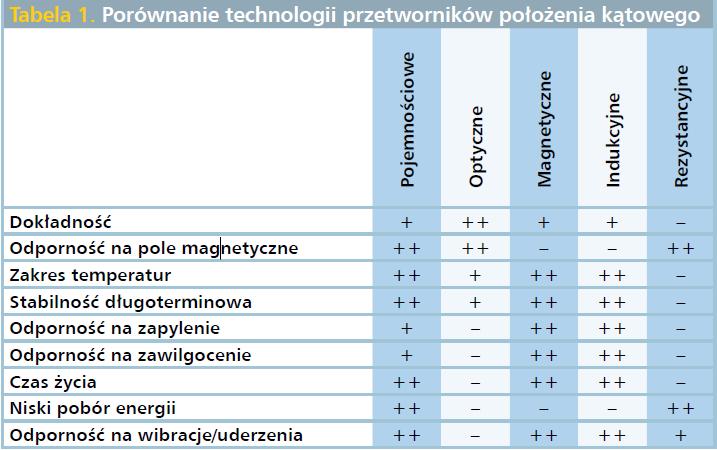
Tabela 1. Porównanie technologii przetworników położenia kątowego
Następnie obliczana jest różnica sygnałów według podanej zależności. Wynikiem demodulacji tego sygnału jest sygnał proporcjonalny do różnicy θ‒δ. W zależności od tej wartości kąt δ, którego wartość jest przechowywana w liczniku, jest zwiększany lub zmniejszany, do momentu gdy różnica θ‒δ zostanie wyzerowana (przy założonej dokładności przetwornika R/D).
Enkodery optyczne
Konkurencyjnym rozwiązaniem dla resolwerów są enkodery optyczne. Dostarczają one układom sterowania informacji o prędkości, przesunięciu lub liczbie obrotów. Występują w dwóch zasadniczych konfiguracjach: jako enkodery inkrementalne (przetworniki obrotowo-impulsowe) i absolutne (przetworniki obrotowo‑ kodowe).
Montaż

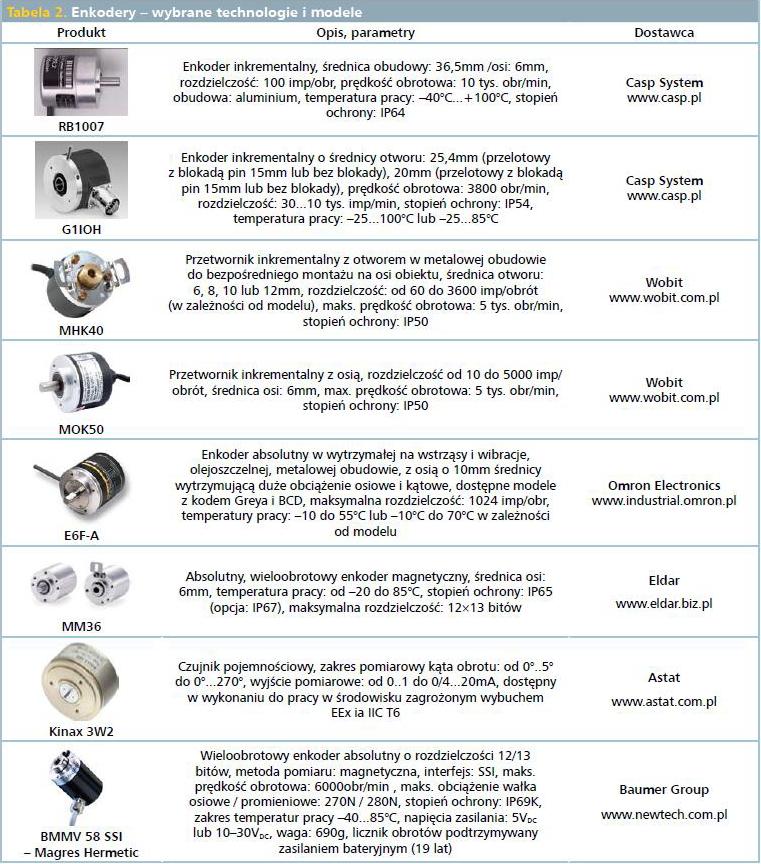
Tabela 2. Enkodery – wybrane technologie i modele
Enkodery można podzielić też ze względu na sposób montażu. Spotykane są enkodery z osią i z otworem na oś (z tzw. pustym wałem). Enkodery z osią są łączone z wałem napędu za pomocą sprzęgła. Enkodery drugiego rodzaju są natomiast montowane bezpośrednio na osi napędowej. Wybierając ten rodzaj enkodera, należy zabezpieczyć obudowę przed ruchem obrotowym, wykorzystując pin blokujący. Przetworniki z otworem są jednak prostsze w montażu, ponieważ nie wymagają dodatkowych sprzęgieł i mocowania.
Budowa
Większość optycznych enkoderów (rys. 2) pracuje w oparciu o taką samą zasadę. Promienie świetlne przechodzą przez tarczę podziałową (z określoną liczbą jasnych i ciemnych pól) zamontowaną na wale obrotowym i padają na fotodetektor, który przetwarza impulsy świetlne na sygnał elektryczny.
Tarcza enkoderów optycznych jest wykonana ze szkła lub tworzywa sztucznego. Podziałki w takim wypadku są nanoszone na tarczę metodą napylania. Stosowane są też dyski metalowe z wytrawionymi działkami. Od liczby działek na tarczy zależy rozdzielczość enkoderów. Przy dzisiejszych możliwościach technologicznych w zakresie obróbki materiałów pozwala to osiągać dużą rozdzielczość pomiaru, która wyróżnia te enkodery na tle innych rozwiązań. W przypadku enkoderów inkrementalnych (przyrostowych) w zależności od liczby kanałów wyjściowych (ścieżek na tarczy) sygnały na wyjściu enkodera odzwierciedlają różne parametry.
Przetwornik resolwerowy Transolver
W Polsce produkcją przetworników resolwerowych zajmuje się m.in. firma Intec. Oferta w tym zakresie obejmuje np. przetwornik położenia kątowego Transolver. Jego głównym elementem pomiarowym jest resolwer. Sygnał pomiarowy z resolwera jest przeliczany i przetwarzany na prąd 4–20mA, który jest proporcjonalny do kąta odchylenia osi od punktu początkowego. Zakres pomiarowy można określić w przedziale 0°...40° (minimum) do 0°...360° (pełny obrót), z dowolnie ustalonym punktem początkowym i kierunkiem obrotu.
Najważniejsze elementy konstrukcyjne przetwornika to obudowa z końcówką do mocowania na gwincie, wodoodporna klawiatura membranowa z dwoma przyciskami i wyświetlaczem odpornym na wysokie i niskie temperatury, pokrywa tylna z szybką oraz ekranowany kabel o długości 0,5m. Wewnątrz znajduje się główny element pomiarowy oraz elektroniczny układ przetwarzania. Głównym zastosowaniem Transolvera jest współpraca z siłownikami nastawczymi układów regulacji automatycznej, gdzie pełni on rolę przetwornika pomiarowego sygnału sprzężenia zwrotnego. Przetwornik może jednak znaleźć zastosowanie także w innych aplikacjach (np. systemy radarowe, klimatyzacja).
|
Enkodery przyrostowe
Enkodery inkrementalne pozwalają mierzyć przemieszczenie kątowe (enkodery z jednym kanałem wyjściowym). Rozpoznają też kierunek ruchu. W takim przypadku na tarczy są dwa kanały wyjściowe z wzajemnie przesuniętymi działkami, co zapewnia przesunięcie fazowe o 90º między impulsami z obu kanałów. Kierunek obrotu można określić w zależności od tego, z którego kanału sygnał jest opóźniony. Zasadnicza różnica między resolwerami i enkoderami inkrementalnymi polega na tym, że pierwsze z wymienionych przetworników określają bezwzględną pozycję. W przypadku enkoderów bezpośrednio jest śledzony jedynie ruch przyrostowy.
Natomiast pozycja bezwzględna jest określana za pomocą dodatkowego fotoelementu, który odbiera impuls świetlny raz w czasie pojedynczego obrotu (enkodery z trzema kanałami wyjściowymi). Jednak jeżeli zasilanie zostanie odłączone, wszystkie informacje są tracone. Po ponownym doprowadzeniu zasilania nie jest znane bezwzględne położenie, do momentu gdy enkoder ponownie przejdzie przez pozycję odniesienia. Aplikacje wymagające określenia bezwzględnej pozycji narzucają konieczność zastosowania bardziej złożonych i droższych enkoderów absolutnych.
Enkodery absolutne
Zasadniczym elementem enkoderów tego rodzaju jest tarcza z naniesionym kodem, najczęściej kodem Graya. Wynik pomiarów enkoderów absolutnych ma postać słowa kodowego odpowiadającego przesunięciu (np. w przypadku enkoderów z wyjściem SSI). Enkodery absolutne są powszechnie wykorzystywane w aplikacjach, gdzie informacja o dokładnej pozycji jest czynnikiem krytycznym ze względu np. na bezpieczeństwo.
Po odłączeniu zasilania enkoder absolutny zachowuje bowiem informację o pozycji, nawet jeżeli w tym czasie została ona zmieniona. Aktualna pozycja może być poprawnie odczytana po ponownym uruchomieniu urządzenia. Enkodery absolutne można podzielić na dwie grupy: jedno- i wieloobrotowe. Czujniki pierwszego rodzaju dostarczają jedynie informacji na temat położenia w obrębie jednego obrotu, nie wskazując, ile takich obrotów zostało wykonanych. Enkodery wieloobrotowe dostarczają także informacji o liczbie obrotów.
Resolwerowy pozycjoner siłowników pneumatycznych
Najważniejsze elementy pozycjonera Spiroster-07, zamknięte w strugo- i pyłoszczelnej obudowie, to bezstykowy układ pomiaru położenia kątowego, piezoelektryczny przetwornik elektropneumatyczny, mikroprocesorowy układ sterowania oraz panel ustaw i sterowania lokalnego. Dodatkowo pozycjoner może być wyposażony w manometry kontrolne. Są też stosowane różne zestawy mocujące do jarzma napędu w zależności od rodzaju siłownika. Pomiar położenia jest realizowany przy użyciu resolwera i w przypadku siłowników liniowych polega na pomiarze bezwzględnego kąta wychylenia dźwigni, odniesionego do jej poziomego położenia. Układ elektroniczny wyznacza położenie siłownika zgodnie z tangensem kąta wychylenia dźwigni.
Pomiar położenia siłowników obrotowych jest mierzony bezpośrednio, jako kąt wychylenia osi pozycjonera. Zadane położenie siłownika jest porównywane z wynikiem pomiaru. Na tej podstawie układ sterowania wyznacza sygnał sterujący piezoelektrycznym przetwornikiem elektropneumatycznym. W pozycjonowaniu jest wykorzystywany algorytm Fuzzy-PID (zmienne nastawy regulatora PID w zależności od położenia i zmian dynamiki siłownika). Pozycjoner Spiroster-07 jest przeznaczony do montażu na siłownikach pneumatycznych jednostronnego działania o ciśnieniu zasilania do 600kPa. Jest on stosowany m.in. jako integralna część pneumatycznych membranowych wielosprężynowych siłowników typu P5/R5 firmy ZA Polna S.A.
|
Słabe punkty
Przewagą resolwerów nad enkoderami optycznymi pozostaje wytrzymałość na długotrwałą pracę w wysokich temperaturach. Słabym punktem enkoderów tego typu są wbudowane elementy półprzewodnikowe wykorzystywane do wzmacniania i formowania sygnału wyjściowego, które są wrażliwe na wysokie temperatury. W resolwerach ten problem nie występuje, ponieważ sama konstrukcja przetwornika nie wymaga stosowania elementów wrażliwych na temperaturę. Przetwornik R/D nie jest bowiem integralną częścią resolwera, a jedynie dodatkowym, chociaż niezbędnym, układem przetwarzania.
Problemem są też procesy starzeniowe wpływające na wydajność diod LED stosowanych w enkoderach jako źródła światła. Rezultatem tego niekorzystnego zjawiska jest mniejszy poziom sygnału wyjściowego. To, np. w przypadku enkoderów inkrementalnych, z czasem powoduje, że przesunięcie fazowe między kanałami jest również mniejsze. Wówczas występują trudności z detekcją kierunku obrotu. Ten problem jest przez niektórych producentów rozwiązywany za pomocą specjalnych elektronicznych obwodów kompensacji starzenia. Takie rozwiązanie jest implementowane np. w enkoderach firmy Kubler.
Przetworniki drogi z kołem pomiarowym

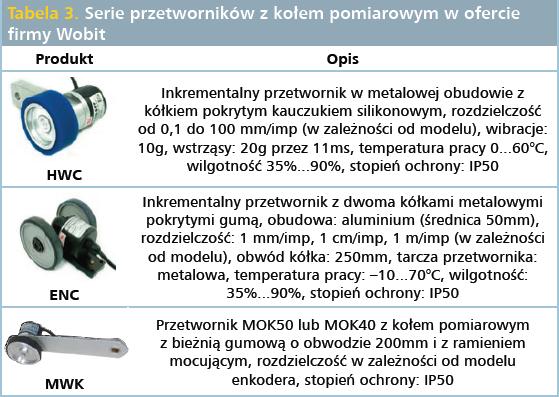
Tabela 3. Serie przetworników z kołem pomiarowym w ofercie firmy Wobit
Przetworniki obrotowo-impulsowe są stosowane w pomiarach długości w różnych aplikacjach np. w podajnikach papieru, przy cięciu różnych materiałów. Do pomiaru długości przewijanych materiałów są używane enkodery z osią i kołem pomiarowym. Na osi przetwornika optoelektronicznego założone jest w takim przypadku koło (lub dwa) o określonej średnicy. Przy danej rozdzielczości enkodera pozwala to wyznaczyć długość materiału.
W układach przetworników tego rodzaju ważny jest dobór materiału, którym pokryte jest koło pod kątem właściwości mierzonego obiektu. Aby uzyskać odpowiedni kontakt i wyeliminować poślizg między kołem pomiarowym i mierzonym materiałem, stosuje się pokrycie kół silikonem lub gumą. Enkodery z kołem pomiarowym oferuje m.in. firma Wobit (patrz tabela).
|
Wytrzymałość enkoderów optycznych
Poprawne działanie enkoderów optycznych jest uzależnione od stopnia czystości w obrębie obudowy. Wszelkie zanieczyszczenia przenikające do wnętrza przetwornika skutkują błędami pomiaru. Dlatego jednym z problemów, które towarzyszą użytkowaniu enkoderów w trudnych warunkach otoczenia, jest wnikanie wody do środka urządzenia lub kondensacja wewnątrz. Drugi problem dotyczy między innymi enkoderów narażonych na naprzemienne nagrzewanie i ochładzanie. Zabezpieczeniem przed przenikaniem wody do wnętrza enkodera jest wybór urządzenia o stopniu ochrony, który jest dostosowany do wymagań danej aplikacji.
Rozwiązaniem problemu z kondensacją jest np. stosowanie obudowy z jednolitego odlewu, co jest oferowane przez niektórych producentów. Pod wpływem wibracji dysk może np. zostać zarysowany, a pod wpływem silnego uderzenia może nawet dojść do zniszczenia tarczy. Dlatego ważnym czynnikiem jest też mechaniczna wytrzymałość enkoderów. Negatywnym zjawiskiem, powodującym zbyt duże obciążenie enkodera, jest także brak współosiowości wałka enkodera i obrotowej części maszyny, do której przetwornik jest zamocowany. Prowadzi to do szybszego zużycia łożysk. Dlatego warto zwrócić uwagę na maksymalne dopuszczalne obciążenia promieniowe i osiowe, których nie wolno przekraczać oraz na wykonanie łożysk, których wytrzymałość wpływa na czas użytkowania enkoderów.
Modyfikacje w enkoderach SENDIX
W celu zapewnienia bezpiecznej pracy nawet w trudnych warunkach panujących w przemyśle producenci wprowadzają w enkoderach kolejne zmiany konstrukcyjne. Przykładem jest seria enkoderów Sendix firmy Kübler. W przetwornikach tej serii zmodyfikowano osadzenie podwójnych łożysk. Dzięki temu zmniejszyło się prawdopodobieństwo uszkodzenia dysku, „zgubienia impulsów”, uzyskano też większą tolerancję błędów instalacyjnych i żywotność. Znacznie podniesiono także stopień szczelności do IP67 oraz zwiększono zakres temperatury pracy enkoderów od –40 do +85°C. Bezpieczeństwo zapewniają też diody diagnostyczne na obudowie enkodera, jednoznacznie identyfikujące status pracy enkodera.
Ponadto w enkoderach absolutnych wieloobrotowych w miejsce przekładni elektronicznych Kübler wprowadził przekładnie mechaniczne Taka modyfikacja pozwala enkoderom pracować w silnych polach elektromagnetycznych, np. przy hamulcach magnetycznych. Do budowy przekładni mechanicznych zastosowano odpowiednie materiały, a na pierwszej przekładni zostało założone łożysko. Dzięki temu enkoder nadal może pracować w aplikacjach wysokodynamicznych.
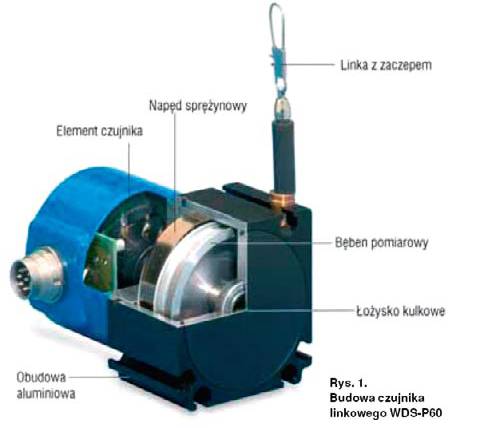
Przetworniki drogi z linką pomiarową
Przetworniki tego rodzaju mierzą przemieszczenie liniowe ruchomych elementów, do których doczepiana jest stalowa linka. Zasadniczym elementem przetwornika jest bęben, na który jest nawijana linka. Bęben jest połączony z elementem pomiarowym, którym może być enkoder, jak również np. potencjometr. Zaletą stosowania przetworników z linką pomiarową jest większa, niż w przypadku innych metod, swoboda w instalacji.
Często linkę jest dużo łatwiej zaczepić i zmieścić tam, gdzie obszar instalacji jest ograniczony i montaż samego czujnika pomiarowego jest niemożliwy lub utrudniony. Ponadto używanie linki jest możliwe także w trudnych warunkach, które wpływają niekorzystnie na sam przetwornik pomiarowy, np. wysokie temperatury. Bęben z wrażliwym elementem, np. enkoderem, może w takim wypadku zostać skutecznie odizolowany
|
Enkoder optyczny czy magnetyczny
Enkodery optyczne zapewniają dużą rozdzielczość i dokładność pomiaru. Natomiast większa wytrzymałość i dłuższy czas życia to cechy charakterystyczne enkoderów magnetycznych i pojemnościowych, które opisane zostały poniżej.
Enkodery magnetyczne
Problemy związane z wpływem zanieczyszczeń na dokładność pomiaru praktycznie nie dotyczą enkoderów magnetycznych. Ewentualne zanieczyszczenia, które dostaną się do środka obudowy enkodera tego rodzaju, w mniejszym stopniu wpływają na detekcję sygnału użytecznego, którym w tym wypadku są zmiany pola magnetycznego. Czujniki tego rodzaju charakteryzuje także większa odporność na wibracje i uderzenia. Metoda pomiaru enkoderów optycznych i magnetycznych jest co do zasady zbliżona. Na przykład enkodery magnetyczne absolutne mogą składać się z dwóch następujących elementów: wirującej tarczy z kodem naniesionym magnetycznie i czujnika, który mierzy zmiany pola magnetycznego. Do pomiaru pola są wykorzystywane np. czujniki Halla. Napięcie z czujnika jest przetwarzane do postaci kodu cyfrowego odzwierciedlającego pozycję tarczy.
Czujniki w enkoderach magnetycznych
W enkoderach magnetycznych stosowane są zasadniczo dwa rodzaje czujników pola magnetycznego: wspomniane czujniki Halla oraz czujniki magnetorezystywne. Oba typy przetworników mają odmienne cechy, które powodują, że znajdują one zastosowanie w różnych aplikacjach. Czujniki magnetorezystywne nie nadają się do wyznaczania bezwzględnej pozycji w ramach jednego obrotu, mają nieliniową charakterystykę z histerezą oraz są wrażliwe na wpływ zewnętrznego pola magnetycznego. Czujniki Halla są pod tymi względami przeciwieństwem przetworników magnetorezystywnych – umożliwiają pomiar bezwzględnej pozycji, a ich charakterystyka jest liniowa. Ponadto pomiar różnicowy z kilku czujników Halla pozwala zredukować wpływ zewnętrznego pola magnetycznego na poprawność wyników. Z tego względu czujniki Halla są w enkoderach magnetycznych częściej stosowane.
Enkodery magnetyczne firmy Renishaw w technologii OnAxis
Renishaw ma w swojej ofercie enkodery magnetyczne konstruowane w oparciu o technologię OnAxis. Moduł enkodera składa się w takim wypadku z dwóch części: układu typu ASIC, który zawiera matrycę czujników Halla oraz magnesu, obracającego się nad tym układem. Pod wpływem zmian strumienia magnetycznego układ czujników wytwarza sygnały napięciowe typu sinus i kosinus, które są przetwarzane na bezwzględną wartość położenia kątowego.
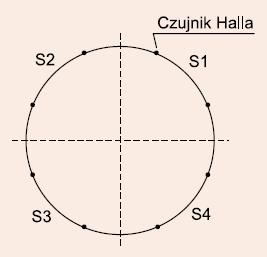
Matryca
Czujniki w matrycy są ułożone na kształt okręgu, z równym kątem między sąsiednimi sensorami. Minimalnie matryca musi składać się z czterech czujników. Średnica okręgu matrycy czujników nie powinna być większa niż średnica magnesu użytego w enkoderze. Czujniki są w ramach okręgu pogrupowane w ćwiartkach. W każdej ćwiartce jest taka sama liczba czujników, które generują odpowiednie sygnały, np. s1, s2, s3 i s4. Sygnały te są przesunięte w fazie o 90°. Odpowiednie sumowanie tych sygnałów umożliwia uzyskanie sygnału sinusoidalnego i kosinusoidalnego według zależności: sinus = s1+s2–s3–s4 oraz kosinus = s1–s2–s3+s4.
Magnes
Magnes stały jest wykonywany zazwyczaj z jednego z następujących materiałów (głównie ziem rzadkich): SmCo (magnes samaro-kobaltowy) lub NdFeB (magnes neodymowy). Wymagane jest zastosowanie silnych magnesów, tak by użyteczne zmiany pola magnetycznego mogły przewyższać pola magnetyczne występujące w otoczeniu enkodera. Zarówno SmCo, jak i NdFeB posiadają cechy, determinujące ich zastosowanie w określonych aplikacjach. NdFeB, ponieważ zawiera żelazo, jest materiałem korozyjnym, co wymusza odpowiednie zabezpieczenie magnesu. Ponadto maksymalna temperatura pracy wynosi 150°C. W wyższych temperaturach materiał może się rozmagnesować. Dla porównania magnesy samaro-kobaltowe mogą pracować w temperaturach dochodzących do 300°C i nie wymagają zabezpieczenia antykorozyjnego.
|
Zalety przetworników magnetycznych
Najczęściej wymienianą wadą enkoderów magnetycznych jest rozdzielczość, która w porównaniu do enkoderów optycznych jest mniejsza. Należy jednak pamiętać o zaletach przetworników magnetycznych, takich jak: duży zakres temperatur pracy (od temperatur minusowych do powyżej 100°C), duża prędkość, możliwość odseparowania elementów pomiarowych od części mechanicznej przetwornika oraz pomiar przemieszczenia absolutnego i przyrostowego.
Dzięki tym zaletom w pewnych zastosowaniach enkodery magnetyczne są niezastąpione, nawet kosztem nieco mniejszej rozdzielczości. W przypadku konieczności zastosowań enkoderów w ekstremalnie trudnych warunkach środowiskowych, stosować można specjalne rozwiązania, takie jak przykładowo produkty Magres hermetic firmy Baumer Electric. Elementy te charakteryzują się stopniem ochrony IP68, IP69K i wykonywane są ze stali nierdzewnej, co umożliwia ich stosowanie w środowiskach agresywnych chemicznie. Więcej informacji w prezentacji firmowej za raportem rynkowym.
Enkodery pojemnościowe

Rys. 3.Przetwornik pojemnościowy firmy Netzer Precision Motion Sensors: (a) trzyczęściowy i (b) dwuczęściowy (źródło: Netzer Precision Motion Sensors)
Na polskim rynku można znaleźć także przetworniki pojemnościowe np. firmy Netzer Precision Motion Sensors (w ofercie firmy Wobit). Działają one w oparciu o opatentowaną technologię Electric Encoder. Metoda pomiaru w tym wypadku opiera się na zmianie pojemności, która odpowiada zmianie położenia elementu obrotowego. Przetworniki tego typu są wykonywane jako dwu- lub trzyczęściowe (rys. 3 a i b). W trzyczęściowym czujniku zamkniętym w ekranowanej obudowie pole elektryczne między nieruchomymi okładkami kondensatora jest zaburzane przez poruszający się element z dielektryka.
Natomiast w przetworniku drugiego typu jedna płytka jest nieruchoma, a druga jest połączona z obrotowym wałkiem. W obu przypadkach na podstawie zmian pojemności generowany jest sygnał elektryczny, który po odpowiednim przetworzeniu niesie informację o absolutnym przemieszczeniu obrotowego elementu. Zaletą technologii pojemnościowej jest możliwość budowy przetworników, które mogą pracować w szerokim zakresie temperatur, nawet powyżej 100°C.
Cechą charakterystyczną tej metody pomiaru jest też mały pobór energii. Ze względu na brak szklanej tarczy, podobnie jak w przypadku przetworników magnetycznych, enkodery pojemnościowe są odporne na uszkodzenia mechaniczne. Duża dokładność oraz niezawodność sprawiają, że przetworniki pojemnościowe są stosowane nie tylko w automatyce, ale też np. w elektronicznych układach sterowania w pojazdach. Oprócz przetworników firmy Netzer Precision Motion Sensors enkodery pojemnościowe (produkcji Camille Bauer) można znaleźć w ofercie firmy Astat.
Enkoder w sterowniku silnika krokowego

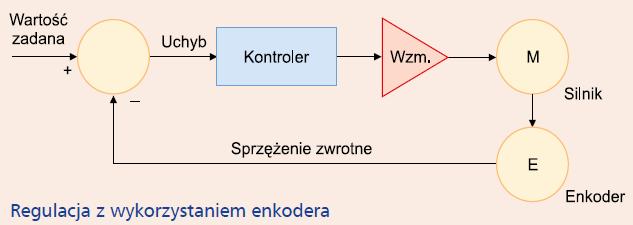
Regulacja z wykorzystaniem enkodera
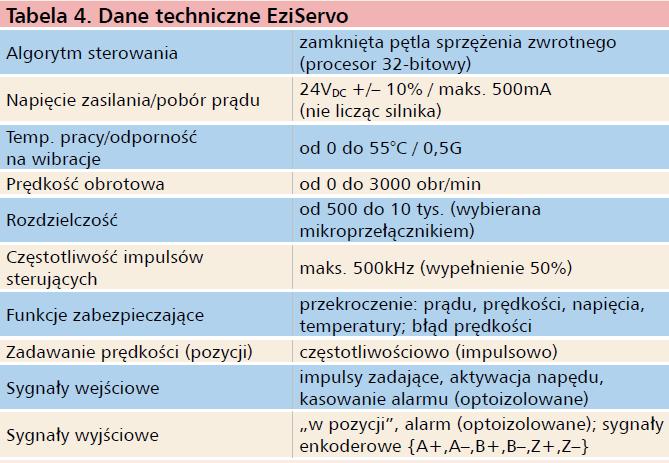
Ezi-Servo to sterownik silników krokowych wykorzystujący metodę regulacji w pętli sprzężenia zwrotnego. Aktualna pozycja wału silnika jest śledzona dzięki zastosowaniu enkodera o dużej rozdzielczości. Dane o pozycji są aktualizowane co 25μs. Przy nagłej zmianie obciążenia, która powoduje utratę synchronizacji silnika sterownik kompensuje pozycję wału.
W ten sposób eliminowane jest zjawisko utraty kroku.Zastosowanie sterowania w zamkniętej pętli pozwala też wyeliminować konieczność regulacji wzmocnienia układu wzmacniacza, która może być skomplikowana w zależności od rodzaju obciążenia.
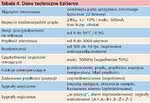
Tabela 4. Dane techniczne EziServo
Sterownik Ezi-Servo znajduje zastosowanie przede wszystkim w układach o niezbyt sztywnej charakterystyce obciążenia (układy taśmowe, przekładnie pasowe). Zaletą Ezi-Servo jest także eliminacja zjawiska kołysania wału silnika, co jest ważne przy sterowaniu precyzyjnymi urządzeniami, np. w systemach wizyjnych. Produkty Ezi-Servo dostępne są w ofercie opolskiej firmy Eldar.
|
Podsumowanie
Mimo pewnych wad enkodery optyczne cieszą się obecnie największą popularnością na rynku. W związku z tym większość producentów napędów i sterowników PLC implementuje możliwość współpracy z tymi przetwornikami. Resolwery pod tym względem nie cieszą się już taką popularnością, mimo że do niedawna były szeroko stosowane w przemyśle. Wynikało to głównie z dużej wytrzymałości na trudne warunki otoczenia, zwłaszcza na długotrwałą pracę w wysokich temperaturach i przy dużych wibracjach. Jednak obecnie są używane coraz rzadziej, głównie ze względu na bardziej wytrzymałe enkodery, nie tylko optyczne, które stopniowo opanowują rynek.
Monika Jaworowska




















{kind=link}