WYBÓR SILNIKA

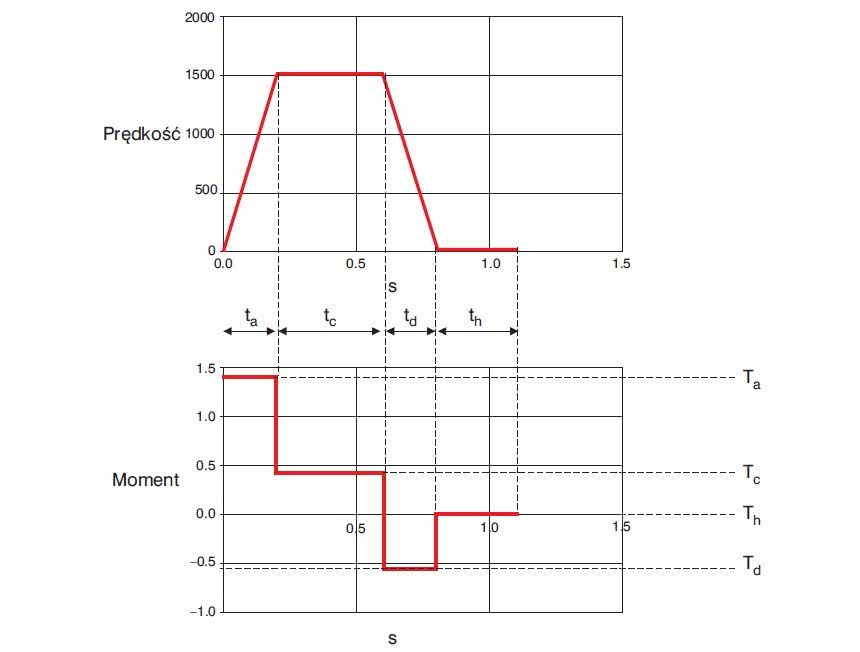
Rys. 7. Średni moment oporowy wyznacza się na podstawie wartości momentu w różnych fazach ruchu
W kolejnym kroku parametry silnika przeanalizować należy pod kątem następujących parametrów aplikacji: maksymalnej prędkości oraz maksymalnego Tmax i średniego momentu oporowego TRMS. Pierwszy z nich można wyznaczyć na podstawie przyjętego profilu ruchu.
Następnie należy obliczyć maksymalny moment oporowy Tmax = Ta + Tc, który jest sumą dwóch składników: iloczynu Ta bezwładności systemu Js i przyspieszenia a oraz momentu oporowego Tc zależnego od sił grawitacji, tarcia lub innych sił zewnętrznych. Bezwładność systemu oblicza się z kolei jako sumę bezwładności obciążenia silnika oraz bezwładności jego wirnika, czyli Js = Jo + Jr.
Wyobraźmy sobie układ napędowy, w którym silnik ma wprawić w ruch obrotowy element w kształcie dysku. W celu obliczenia bezwładności Jo tego ostatniego należy najpierw wyznaczyć jego masę W według zależności:
W = π ⋅ (D/2)² ⋅ L ⋅ ρ,
gdzie D to średnica dysku, L - grubość dysku, a ρ - gęstość materiału z jakiego wykonano ten element. Do wyznaczenia bezwładności dysku służy z kolei formuła:
J0 = (W ⋅ r²)/(2 ⋅ g),
gdzie r - promień dysku, natomiast g - przyspieszenie ziemskie. Po zsumowaniu wartości tej wielkości z bezwładnością wirnika i przy założeniu, że tarcie przy obrocie dysku jest pomijalnie małe można wyznaczyć maksymalny moment oporowy (Tmax = Ta).
 Druga wymagana wartość TRMS charakteryzuje średni moment oporowy, jaki może wystąpić w całym cyklu pracy układu napędowego. Jego wyznaczenie jest trudniejsze. W tym celu wymagana jest bowiem znajomość wartości następujących wielkości (rys. 7): momentu w czasie przyspieszania Ta, momentu podczas pracy ze stałą prędkością Tc, momentu w czasie zwalniania Td, momentu w czasie zatrzymania Th oraz długości przedziałów czasowych, w których prędkość: rośnie ta, pozostaje niezmienna tc, maleje td oraz jest równa zero th. Moment znamionowy można obliczyć, korzystając z zależności:
Druga wymagana wartość TRMS charakteryzuje średni moment oporowy, jaki może wystąpić w całym cyklu pracy układu napędowego. Jego wyznaczenie jest trudniejsze. W tym celu wymagana jest bowiem znajomość wartości następujących wielkości (rys. 7): momentu w czasie przyspieszania Ta, momentu podczas pracy ze stałą prędkością Tc, momentu w czasie zwalniania Td, momentu w czasie zatrzymania Th oraz długości przedziałów czasowych, w których prędkość: rośnie ta, pozostaje niezmienna tc, maleje td oraz jest równa zero th. Moment znamionowy można obliczyć, korzystając z zależności:
TRMS = √[(Ta² ⋅ ta + Tc² ⋅ tc + Td² ⋅ td + Th² ⋅ th)/(ta + tc + th)]
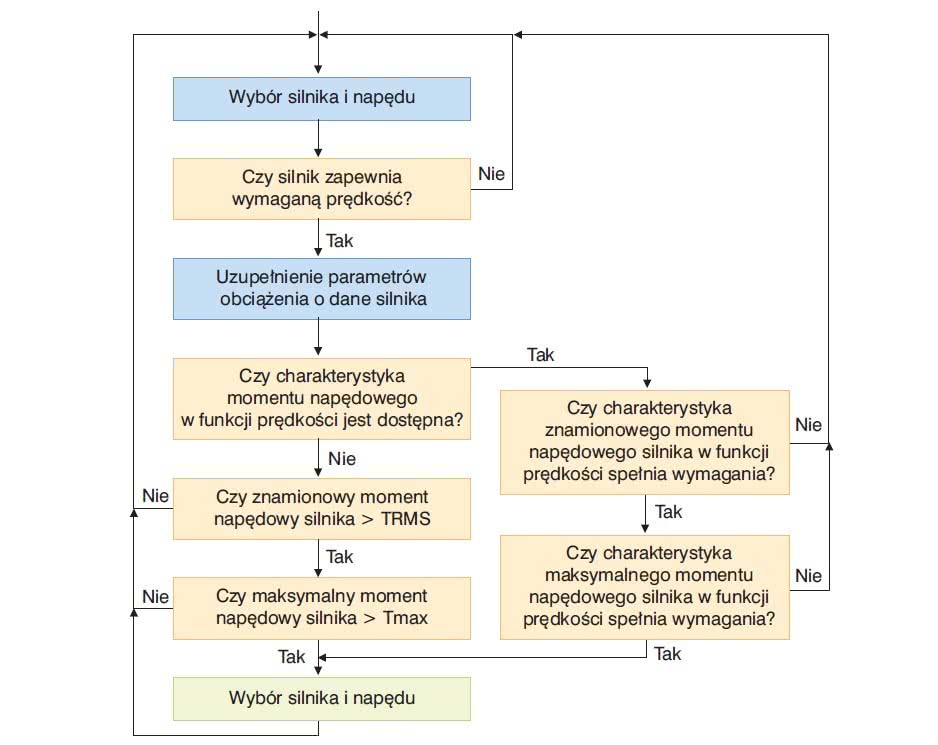
Po wyznaczeniu parametrów obciążenia w odniesieniu do nich przeprowadzić należy analizę parametrów silnika według schematu przedstawionego na rysunku 8.
Przykładowe produkty
 Serwokontroler AC DigitAX ST Serwokontroler AC DigitAX ST
Cztery wersje wykonania (DST Basic, DST Idexer z wbudowanym modułem pozycjonowania SM Application Lite, DSTPlus z wbudowanym sterownikiem PLC SM Application Plus, DSTZ z wbudowanym modułem pozycjonowania wbudowany port enkodera, RS-485 Modbus RTU, sterowanie prędkością i momentem (łącznie ponad 700 parametrów).
 Serwosilniki MCS Serwosilniki MCS
Zakres momentu obrotowego: od 0,5 do 190 Nm (od 0,25 do 15,8 kW), elektroniczna tabliczka znamionowa, wbudowany resolwer lub enkoder inkrementalny, lub enkoder absolutny, większa gęstość mocy dzięki magnesom o wysokiej jakości w technologii SEpT i specjalnemu kształtowi biegunów, dostępne wersje z hamulcem postojowym, chłodzenie własne lub zewnętrzne, stopień ochrony IP65 (z chłodzeniem zewnętrznym IP54).
www.lenze.com
 Serwonapędy i serwosilniki Accurax G5 Serwonapędy i serwosilniki Accurax G5
Napędy: zintegrowana funkcja indeksera w modelach analogowych/impulsowych, bezpieczeństwo zgodne z normą ISO 13849-1 (PL d), funkcja tłumienia wibracji, sterowanie silnikami obrotowymi od 50 W do 15 kW. Silniki: moce od 50 W do 15 kW, prędkości znamionowe: 1000, 1500, 2000 i 3000 obr./ min, szczytowy moment obrotowy równy 300% momentu obrotowego przy pracy ciągłej dostępny przez 3 s lub dłużej w zależności od modelu, wbudowany enkoder o rozdzielczości 20 bitów, stopień ochrony IP67.
www.industrial.omron.pl
 Serwosilniki synchroniczne z serii CMP Serwosilniki synchroniczne z serii CMP
Moment obrotowy: od 0,5 Nm do 47 Nm, prędkość obrotowa: 2000, 3000, 4500, 6000 obr./min, przeciążalność silników: do 4,75 × moment statyczny, cicha praca przy dużych prędkościach obrotowych (55-75 dB), konstrukcja silników zoptymalizowana pod kątem montażu w warunkach ograniczonych przestrzennie.
www.sew-eurodrive.pl
 Serwowzmacniacze z serii MR-E-A/AG i serwosilniki HF-KE Serwowzmacniacze z serii MR-E-A/AG i serwosilniki HF-KE
Napędy: moc wyjściowa: do 2 kW, system sterowania: sinusoidalne sterowanie PWM / system regulacji prądu, hamowanie dynamiczne wbudowane, wybrane zabezpieczenia: nadprądowe, nadnapięciowe, przed błędem enkodera, przed nadmiernymi obrotami, wyłącznik termiczny chroniący przed przeciążeniem. Silniki: prędkość obrotowa znamionowa: 3000 obr./min, maksymalna: 4500 obr./min, znamionowa moc wyjściowa: 0,1 kW - 0,75 kW, znamionowy moment obrotowy: 0,32-2,4 NM, mała bezwładność.
www.mitsubishi-automation.pl
 Serwonapędy z serii Acopos mini Serwonapędy z serii Acopos mini
Zintegrowane sprzętowo i programowo ze sterownikiem. Moc wyjściowa: 450-700 W. Czas skanu pętli regulatora prądu: 50 µs, pętli regulatora prędkości: 200 µs, pętli regulatora pozycji: 400 µs. Zintegrowany filtr i rezystor hamujący.
www.br-automation.com
 Serwonapędy z serii SINAMICS S110 Serwonapędy z serii SINAMICS S110
Moc wyjściowa od 120 W do 90 kW. Wbudowane funkcje bezpieczeństwa. Pozycjonowanie silników synchronicznych i indukcyjnych. Interfejsy komunikacyjne: Profibus, CAN, Profinet.
www.siemens.pl
Serwonapędy IndraDrive Cs
 Moc wyjściowa: 100 W - 3,5 kW. Komunikacja w sieci Ethernet, za pośrednictwem różnych protokołów sieciowych (Sercos III, Profinet IO, EtherNet/IP and EtherCat) i Profibus. Interfejs wieloenkoderowy. Zintegrowany rezystor hamowania i funkcje bezpieczeństwa. Moc wyjściowa: 100 W - 3,5 kW. Komunikacja w sieci Ethernet, za pośrednictwem różnych protokołów sieciowych (Sercos III, Profinet IO, EtherNet/IP and EtherCat) i Profibus. Interfejs wieloenkoderowy. Zintegrowany rezystor hamowania i funkcje bezpieczeństwa.
www.boschrexroth.com
 Serwonapęd MicroFlex e150 Serwonapęd MicroFlex e150
Zintegrowany dwuportowy hub Ethernet i kompatybilność z protokołami EtherCAT, Ethernet/IP, Modbus TCP/IP. Funkcja Safe Torque-off w standardzie. Uniwersalny interfejs enkodera do obsługi: enkoderów inkrementalnych, BiSS, SSI, EnDat v2.1/v2.2 oraz 1 V sin/cos.
www.abb.pl
|
PRZEWYMIAROWANIE
 Biorąc pod uwagę liczbę modeli serwosilników i napędów dostępnych na rynku, analiza w opisany sposób każdej możliwej kombinacji serwonapęd-obciążenie zajęłaby bardzo dużo czasu. Dlatego najczęściej na tym etapie korzysta się ze specjalnego oprogramowania, które automatyzuje ten proces, przyspiesza go i pozwala porównać większą liczbę urządzeń.
Biorąc pod uwagę liczbę modeli serwosilników i napędów dostępnych na rynku, analiza w opisany sposób każdej możliwej kombinacji serwonapęd-obciążenie zajęłaby bardzo dużo czasu. Dlatego najczęściej na tym etapie korzysta się ze specjalnego oprogramowania, które automatyzuje ten proces, przyspiesza go i pozwala porównać większą liczbę urządzeń.
Wybierając silnik, należy pamiętać, że na jego całkowity koszt składa się cena zakupu, wydatki ponoszone na naprawy i konserwację oraz koszty operacyjne, głównie wydatki na zasilającą go energię elektryczną. Ich udział wynosi średnio odpowiednio 2%, 2% oraz aż 96%. W większości przypadków można założyć, że mniejszy moment napędowy można uzyskać w silniku o mniejszych wymiarach, a zatem tańszym. Takie urządzenie zużywa też mniej energii oraz wymaga stosowania wzmacniacza o mniejszym poborze mocy i w mniejszej cenie.
Należy zatem unikać przewymiarowywania parametrów silnika, chociaż warto przy tym zachować ich rozsądny zapas. Przede wszystkim trzeba pamiętać o tym, że komponenty mechaniczne (sprzęgła, łożyska, itp.) z czasem się zużywają. Oprócz naturalnego zużycia materiału przyczyniają się do tego m.in. warunki pracy. W rezultacie rośnie moment oporowy obciążenia silnika. Ponadto odpowiedni zapas parametrów umożliwi w przyszłości rozbudowanie systemu napędowego lub zmianę jego obciążenia bez konieczności wymiany silnika. Za dopuszczalne uznaje się przewymiarowanie nieprzekraczające 20%.
PRZETWORNIKI RUCHU

Rys. 8. Wybór silnika to proces wieloetapowy
Elementem pomiarowym w serwonapędach mogą być przetworniki ruchu różnego typu. Najpopularniejsze z nich to: resolwery i enkodery. Te pierwsze to przetworniki indukcyjne, które składają się z wirnika i stojana. Napięcia indukowane w uzwojeniach stojana są proporcjonalne do kąta obrotu wirnika, a sygnał wyjściowy jest analogowy.
Rozdzielczość przetworników tego typu zależy zatem od rozdzielczości przetwornika analogowo-cyfrowego (zwykle 14-bitowego). Resolwery charakteryzuje duża wytrzymałość na trudne warunki otoczenia, w tym wibracje, zapylenie oraz wysokie temperatury - ich wadą jest natomiast mniejsza dokładność pomiaru w porównaniu do enkoderów, a więc przetworników optycznych z cyfrowym sygnałem wyjściowym.
Ponieważ stosuje się w nich (w przypadku wersji optycznych) tarczę szklaną z naniesioną podziałką, elementy te są czułe na wibracje, zanieczyszczenia oraz obciążenia mechaniczne i wysokie temperatury. Dlatego też nieraz wykorzystuje się ich wykonania specjalne (heavy duty), w których stosowane są różne rozwiązania konstrukcyjne zwiększające wytrzymałość.
Przykładem są tarcze z tworzywa sztucznego zastępujące te szklane, wewnętrzne systemy chłodzenia przetwornika oraz wielostopniowe uszczelnienia i obudowy wykonywane w formie odlewu. Więcej informacji na ten temat znaleźć można w artykule będącym tematem numeru w kwietniu 2012 roku.
 Tobiasz Witor Tobiasz Witor
Dyrektor handlowy Lenze Polska
- Jakie są najczęstsze zastosowania serwonapędów przez Państwa klientów? W jakich aplikacjach wykorzystuje się tego typu rozwiązania?
Lenze ma trzy rynki docelowe, czyli tzw. focus markets - są nimi intralogistyka, sektor automotive oraz consumer goods ze szczególnym uwzględnieniem maszyn pakujących. I to właśnie w tych branżach znaleźć można najwięcej serwonapędów Lenze. Nasze wewnętrzne badania mówią o udziale Lenze w rynku inteligentnych serwonapędów (serwo z PLC) na poziomie 11,5% globalnie. Od 2000 roku każda fabryka Mercedesa napędzana jest przez Lenze, co świadczy o jakości naszych produktów oraz know-how kadry inżynierskiej.
- Czy serwonapędy dostarczane są jako oddzielne komponenty, czy raczej jako element większych wdrożeń i kompletacji?
W Lenze klient zostanie obsłużony kompleksowo! Nasza oferta pokrywa część mechaniczną oraz automatykę, przy czym rdzeniem biznesu jest dział aplikacyjny, który programuje, uruchamia i, jeśli zachodzi taka potrzeba, wizualizuje proces. Koncepcja dostaw z jednej ręki znana jest już w Lenze od lat i stanowił o naszej przewadze konkurencyjnej.
- W jaki sposób obsługujecie odbiorców?
Opieramy się na pięciu fazach tworzenia i eksploatacji maszyny. Nie dostarczamy komponentu - w tym wypadku serwoprzemiennika czy motoreduktora. U nas praca z klientem obejmuje proces od stworzenia koncepcji maszyny, poprzez dobór optymalnego rozwiązania, a następnie opracowania modelu logistycznego i, co najważniejsze, serwisowego w momencie komercjalizacji maszyny.
- Czy sądzić można, że serwonapędy nadal będą popularyzowały się kosztem klasycznych napędów wraz ze wzrostem wymagań klientów?
Obserwujemy powolny, ale zauważalny trend budowy coraz bardziej zaawansowanych technologicznie maszyn w Polsce. Jest to zapewne odpowiedź na zalew tzw. chińszczyzny i sposób na dalszy rozwój oraz wzrost konkurencyjności polskich producentów maszyn. Takim działaniom tylko przyklaskujemy i dopingujemy oraz wspieramy rodzime firmy OEM w ich wyborach.
|
WYBÓR WZMACNIACZA
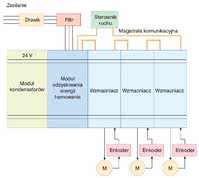
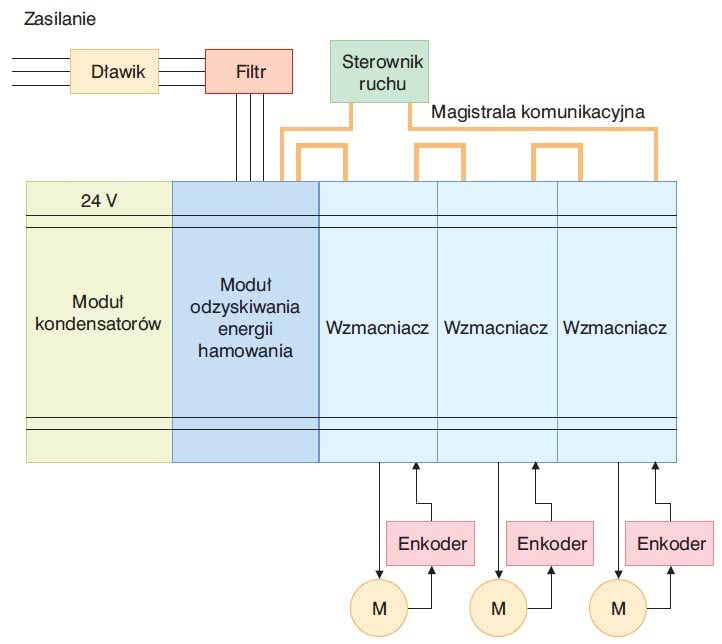
Rys. 9. Serwonapęd wieloosiowy
Najważniejsze parametry wzmacniaczy serwosystemów, które należy porównać z wymaganiami aplikacji, to: moc oraz zakresy napięć i prądów wejściowych i wyjściowych. Zbyt duże natężenie prądu wyjściowego może uszkodzić silnik, natomiast zbyt małe nie pozwoli na wytworzenie wymaganego momentu napędowego. Zbyt niskie napięcie uniemożliwi z kolei uzyskanie maksymalnej prędkości silnika. Oprócz tego niektóre aplikacje wymagają specyficznych rozwiązań.
Na przykład w wypadku napędów do sterowania silnikami bezszczotkowymi ważną kwestią jest także rodzaj komutacji elektronicznej, jaką dany wzmacniacz realizuje. Najczęściej jest to jedna z dwóch metod: sześciostopniowa lub sinusoidalna. W pierwszej klucze tranzystorowe przełączające prąd do poszczególnych uzwojeń silnika są sterowane przebiegami prostokątnymi, a w drugiej - przebiegiem sinusoidalnym. Zaletą komutacji pierwszego typu jest łatwość realizacji, a wadą - mniejsza dokładność sterowania oraz większe pulsacje momentu obrotowego, zwłaszcza przy małych prędkościach.
Bardziej złożone maszyny wymagają sterowania wieloosiowego. W takim wypadku najlepsze są systemy zintegrowane, w których jeden wzmacniacz zasila kilka silników (rys. 9). Tymi ostatnimi steruje jeden kontroler, który synchronizuje pracę poszczególnych osi. Taka konfiguracja ma liczne zalety. Jedną z nich jest oszczędność energii zasilającej dzięki wykorzystaniu energii hamowania. Mimo że zależy to od specyfiki maszyny, istnieje bowiem duże prawdopodobieństwo, że równocześnie część silników będzie przyspieszać, pobierając energię, a część będzie hamować, wytwarzając ją. Zasilanie wszystkich elementów serwosystemu z jednego źródła ogranicza również wydatki na sprzęt (pojedyncze złącza, kable, filtry, itp.).
CZĘŚĆ III - INTEGRACJA I APLIKACJE
W drugiej części artykułu omówione zostaną przykładowe aplikacje serwonapędów oraz różne kwestie związane z ich komunikacją, bezpieczeństwem i integracją w systemach.
Monika Jaworowska
Ilustracja tytułowa: Oprogramowanie Converting Toolbox firmy Siemens zawierające funkcje software’owe związane z różnymi aplikacjami serwonapędowymi - na zdjęciu wizualizacja pracy nawijarki/odwijarki.