AUTOMATYZACJA MIESZANIA I ZAGNIATANIA CIASTA
 Po dodaniu do mąki, cukru i jajek środka spulchniającego należy te wszystkie składniki razem ze sobą wymieszać, a następnie zagnieść ciasto. Zadania te nie należą do fizycznie lekkich, a przy tym sposób, w jaki zostaną wykonane - przede wszystkim dokładność mieszania, szybkość, przyłożona siła i powtarzalność ruchów - wpływają na jakość wyrobu końcowego, bez względu na to, czy jest to domowe ciasto, czy cała seria wypieków przeznaczonych do sprzedaży.
Po dodaniu do mąki, cukru i jajek środka spulchniającego należy te wszystkie składniki razem ze sobą wymieszać, a następnie zagnieść ciasto. Zadania te nie należą do fizycznie lekkich, a przy tym sposób, w jaki zostaną wykonane - przede wszystkim dokładność mieszania, szybkość, przyłożona siła i powtarzalność ruchów - wpływają na jakość wyrobu końcowego, bez względu na to, czy jest to domowe ciasto, czy cała seria wypieków przeznaczonych do sprzedaży.
Dlatego, tak jak w kuchniach w domach prywatnych, obecnie rzadko już czynności te są wykonywane ręcznie, także w piekarniach korzysta się z mikserów i robotów kuchennych. Dokładniej są to odpowiedniki takich sprzętów, rozmiarowo większe i wydajniejsze, które przygotowują duże, liczone w setkach kilogramów, ilości ciasta.
Stopień zautomatyzowania mieszania i zagniatania ciasta, jak i kolejnych etapów przygotowywania go do pieczenia, zależy od wielu czynników. Najważniejsze to: skala produkcji, specyfika ciast - na przykład niektóre muszą wyrosnąć, na co potrzeba czasu i zapewnienia odpowiednich warunków, dostępności miejsca do zorganizowania zautomatyzowanego stanowiska i oczywiście środków, jakie przedsiębiorstwo może na ten cel przeznaczyć.
W produkcji na mniejszą skalę korzysta się często z rozwiązań półautomatycznych. Przykładami są: ubijaczki oraz mieszarki. Pierwsze służą do przygotowywania lekkich ciast, a poza tym kremów, ubijania jaj, majonezu, masła i margaryny, zaś drugie do mieszania różnych składników w celu otrzymania ciast cięższych.
Wyposaża się je w panel sterowniczy do wprowadzania ustawień (prędkości i czasu ubijania / mieszania, zmiany kierunku obrotów misy, jeżeli jest ruchoma, włączenia specjalnych trybów pracy, na przykład mieszania ciasta z mąki o dużej zawartości glutenu), a czasem też wprowadza możliwość zapasowego sterowania awaryjnego. Większość funkcji z zakresu manipulowania misą (dzieżą) jest w nich zautomatyzowanych, na przykład: jej mocowanie, zwalnianie, podnoszenie oraz opuszczanie.
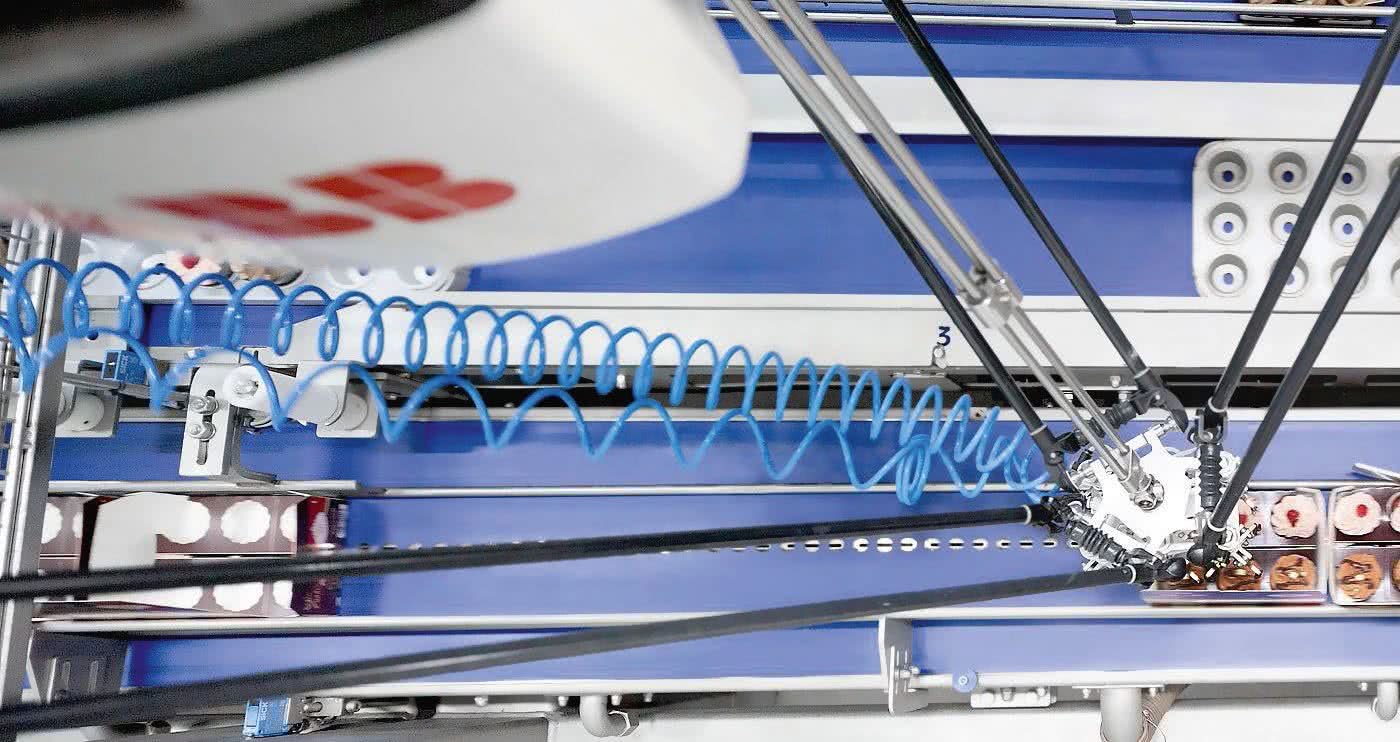
Modernizacja zrobotyzowanego stanowiska dekorowania ciast
Case study 2
W pewnej piekarni zaopatrującej supermarkety na terenie USA odnotowano spadek liczby zamówień. Przyczyną tego były problemy w dziale dekorowania ciast, z powodu których kilkakrotnie nie przyjęto zlecenia, jeżeli klient oczekiwał wymyślnych, bardzo różniących się od standardowo wykonywanych, zdobień.
Oprócz tego czas realizacji kilku zamówień tak bardzo się przedłużył z powodu konieczności ręcznego dekorowania ciast, że zamawiającemu należało wypłacić dużą rekompensatę za opóźnienie. Do piekarni zaczęły też docierać skargi na jakość zdobień. W związku z tym w końcu zdecydowano o zmodernizowaniu istniejącej w zakładzie zrobotyzowanej linii dekorowania.
Jak działała "stara" linia?
Najpierw kamera rejestrowała obraz kolejnych ciast na przenośniku, a oprogramowanie systemu wizyjnego obliczało współrzędne położenia wypieków na taśmociągu i mierzyło ich górną średnicę. Dane te przesyłano do sterownika robota. Na ich podstawie zdobił on wierzch ciasta.
Po przeanalizowaniu działania tego systemu uznano, że powodem jego ograniczeń było bazowanie na informacjach z dwuwymiarowego systemu wizyjnego i przyjęcie założenia, że wszystkie ciasta mają stałą wysokość. Tymczasem nie zawsze jest to prawdą.
Na przykład wystarczy lekka zmiana temperatury i nadzienie nieznacznie gęstnieje albo się rozpuszcza, przez co tworzy grubszą albo cieńszą warstwę. To z kolei powoduje, że ciasto jest minimalnie wyższe lub niższe. Podobnie większe zawilgocenie lub zbyt suche powietrze sprawia, że ciasto pęcznieje lub opada pod ciężarem kremu. Do tego dochodzą niedokładności maszyn na liniach cięcia biszkoptów i ich przekładania kremem.
Różnice między rzeczywistą wysokością ciasta, a przyjmowaną w obliczeniach przez sterownik robota powodowały, że zdobienia przez niego wykonywane były zniekształcone. Ponadto jeśli dekoracjami należało otoczyć dolną podstawę ciasta, której dokładnego rozmiaru nie znano, zadanie to należało wykonać ręcznie.
Rozwiązanie
Rozwiązaniem okazało się zastąpienie systemu wizyjnego 2D laserowym skanerem 3D. Za jego pośrednictwem sterownik robota pozyskiwał informacje nie tylko o dokładnej wysokości każdej sztuki ciasta, ale i o jego kształcie.
Dzięki temu mógł ozdabiać nie tylko górną warstwę, ale i dekorować dolną podstawę, a nawet nanosić wzory na bokach ciasta. Znacząco poprawiła się też dokładność odwzorowywania projektów klientów, a dzięki możliwości całkowitej rezygnacji ze zdobienia ręcznego, również szybkość realizacji zamówień.
|