Autonomiczna zrywka
Warto też dodać, że generalnie w przypadku autonomicznych maszyn do prac leśnych problemem będzie poruszanie się po nierównym podłożu. W tym zakresie testowane są, jak się może wydawać, futurystyczne rozwiązania, na przykład roboty ścinające drzewa, które przemieszczają się z drzewa na drzewo, wykorzystując pień jako podporę, w ogóle nie dotykając ziemi, a zatem niezależnie od warunków terenowych i roboty, które dla zachowania równowagi, w razie przewrócenia się, będą wysuwać pomocnicze ramiona stabilizujące. Choć te pomysły bez wątpienia napędzają innowacje, daleko im do komercjalizacji.
Zdecydowanie najłatwiejsza do zautonomizowania wydaje się zrywka – w tym zakresie rozważa się zaadaptowanie rozwiązań wykorzystywanych w autonomicznych kombajnach rolniczych, które nawigują, wykorzystując GPS i skanery laserowe. Wymagają one jednak dostosowania do specyfiki lasu. Chodzi o wspomniane już nierównomierności podłoża – to odróżnia zwózkę ściętych pni od zbioru upraw rolnych zazwyczaj po stosunkowo płaskim i pozbawionym przeszkód gruncie, co jest wyraźną zaletą w przypadku automatyzacji tego zadania. Tymczasem zrywka może być prowadzona krętymi ścieżkami, na których można się spodziewać, poza zmiennym ukształtowaniem terenu, również licznych przeszkód, na przykład pni leżących w poprzek drogi. Zatem zadanie transportu kłód z miejsca wycinki wymaga informacji w czasie rzeczywistym o położeniu maszyny i zdolności do omijania przeszkód. Sprawę utrudnia też to, że jakość sygnału GPS, nie wspominając o dostępie do Internetu, w lesie może być różna. By rozwiązać ten drugi problem, testowane są rozwiązania, w których transporter (skider albo forwarder) jest połączony z miejscem docelowego rozładunku pni za pomocą stalowej liny, zastępującej GPS. W zakresie detekcji przeszkód i ogólnej orientacji w terenie z kolei testowane są metody opracowywane na przykład z myślą o dronach, bazujące na algorytmach głębokiego uczenia do wykrywania obiektów i tworzenia map otoczenia w czasie rzeczywistym.
Automatyka w tartaku
Celem automatyzacji w tartakach, jak w innych zakładach, jest poprawa wydajności produkcji. To co je wyróżnia, stanowiąc największe wyzwanie w jego realizacji, to specyfika surowca, który jest poddawany obróbce. Charakteryzuje go bowiem niejednorodność i nieprzewidywalność jakości, w szczególności w zakresie kształtu – jest on praktycznie w przypadku każdej kłody niepowtarzalny. To utrudnia dobór ustawień maszyn w taki sposób, by na przykład optymalizując cięcia, uzyskać z danej ilości surowca jak najwięcej wartościowego pod kątem dalszego przetwórstwa drewna, przy równoczesnym utrzymaniu opłacalnej prędkości pracy. W związku z tym ważnym komponentem linii produkcyjnych w tartakach są czujniki, które ułatwiają dostosowanie się do tej zmienności, mierząc cechy, którymi różnią się kolejne kłody. Ze względu na rodzaj surowca są to przede wszystkim sensory bezprzewodowe, a wśród nich głównie czujniki optyczne i wizyjne.
Pierwszym krokiem w obróbce pni jest usunięcie kory, którą są wciąż pokryte, kiedy docierają do tartaku, żeby jak najdłużej mogła chronić drewno przed uszkodzeniem. Na tym etapie sensory są wykorzystywane w kontroli jakości oraz dostarczają sygnałów w pętli sprzężenia zwrotnego do systemu sterowania maszyn do okorowywania.
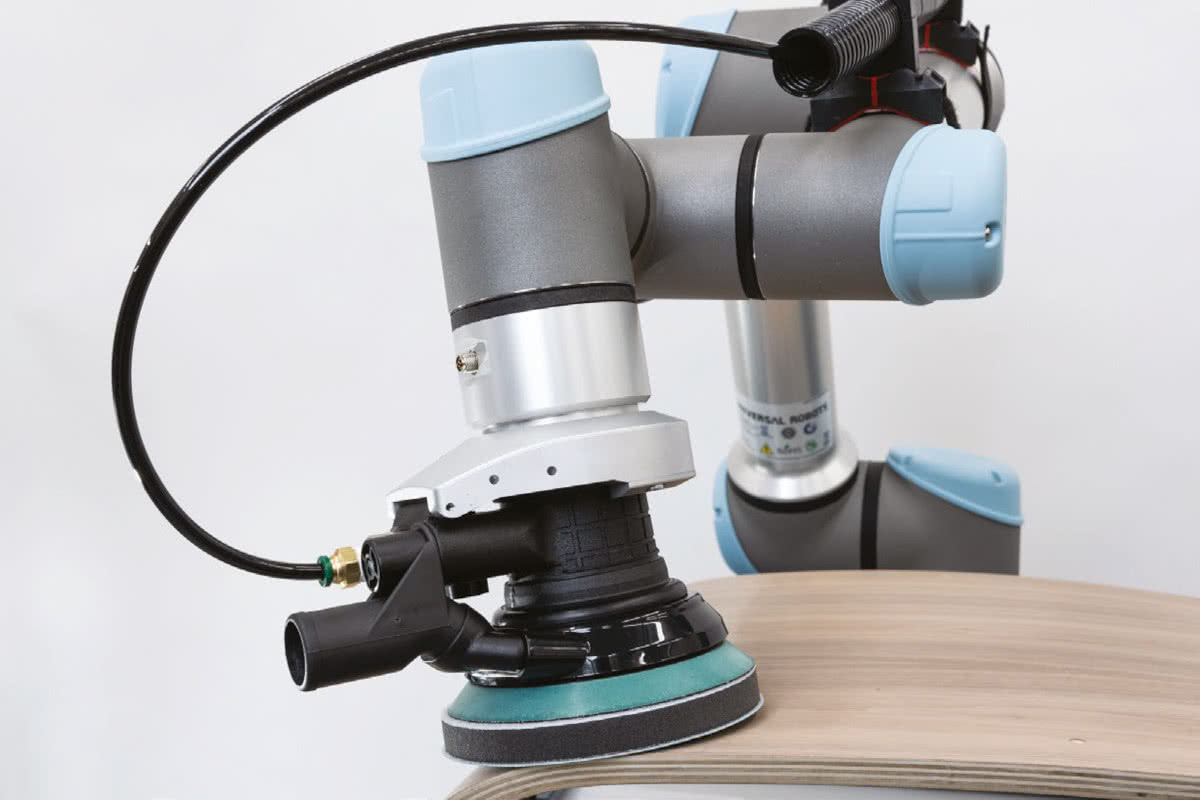
Roboty współpracujące w szlifowaniu drewna
Szlifowanie drewna jest przykładem zadania, którego robotyzacja może przynieść wiele korzyści. Wynika to stąd, że dla ludzi czynność ta jest uciążliwa z kilku powodów. Po pierwsze jest to zadanie... nudne, ponieważ opiera się na powtarzaniu tych samych ruchów. Jest to również czynność... brudna – operatorzy szlifierek pracują w chmurach kurzu. Po trzecie jest to zadanie niebezpieczne – poza ryzykiem skaleczenia istnieje również wysokie prawdopodobieństwo zachorowania na chorobę zespołu cieśni nadgarstka.
W zakresie robotyzacji szlifowania duże nadzieje pokłada się w robotach współpracujących – pierwsze maszyny zaprojektowane pod tym kątem są już nawet dostępne. Sprawdzają się one w szlifowaniu powierzchni płaskich i zakrzywionych, z szerokiej gamy materiałów, na co pozwalają dostępne w zestawie wymienne wkładki szlifierskie oraz wbudowane czujniki siły. Są także zwykle zintegrowane z systemami odsysania pyłu, co poprawia bezpieczeństwo pracowników w pobliżu. Generalnie zaś przewaga robotów współpracujących polega w tym zastosowaniu na tym, że ich przeprogramowanie jest łatwiejsze i szybsze, w porównaniu ze zwykłymi robotami przemysłowymi.
|