MASZYNY KONTRA LUDZIE
Aby dorównać możliwościom człowieka, w systemach wizyjnych wykorzystuje się wysokiej klasy urządzenia, w tym kamery inteligentne oraz specjalistyczne oprogramowanie przetwarzające obraz. Mimo tego, pod pewnymi względami, przewaga człowieka nad automatycznymi systemami kontroli pozostaje ciągle duża.
Dotyczy to zwłaszcza elastyczności działania oraz zdolności do reakcji na zmienne i nieprzewidywalne sytuacje. Wadą automatycznych rozwiązań jest ścisłe realizowanie zaprogramowanego algorytmu. Odnosi się to również do systemów wizyjnych, a negatywne skutki mogą się ujawnić w przypadku błędnego lub nieścisłego algorytmu.
Z drugiej strony w środowisku przemysłowym wydajność człowieka jest jednak znacząco mniejsza. Wpływają na to takie czynniki jak nieuwaga, zmęczenie i znużenie. Automatyczne systemy inspekcji wizyjnej pozwalają uniknąć tych ograniczeń, zapewniając dużą szybkość pracy, większą dokładność i powtarzalność. Wiąże się z tym ograniczenie kosztów, zwiększenie wydajności produkcji oraz eliminacja poważnych usterek gotowych produktów wynikających z błędów na etapie montażu.
WSKAZóWKI PROJEKTOWE
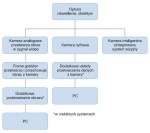
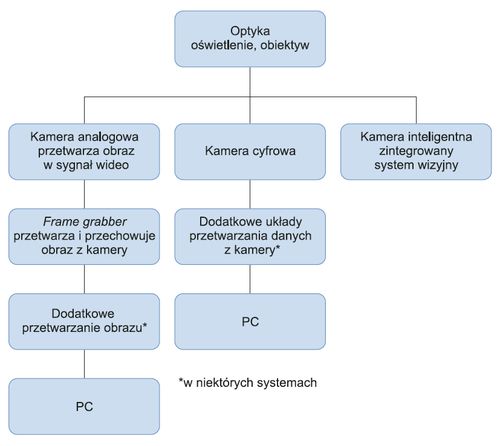
Rys.1. Podstawowe elementy systemu wizyjnego
W zależności od aplikacji system wizyjny powinien spełniać określone wymagania. Różne zadania wymagają implementacji konkretnych funkcji – przykładowo instalacja systemu inspekcji na taśmociągu z gotowymi wyrobami powinna umożliwiać szczegółową obserwację obiektu pod kątem występowania usterek.
Dane pochodzące z systemu wizyjnego decydują w takim wypadku o dalszym losie produktu. Na ich podstawie dany element powinien być zakwalifikowany jako dopuszczony do dalszej obróbki lub jako komponent obarczony defektem, uniemożliwiającym dalsze wykorzystanie.
W zastosowaniach związanym z montażem elementów wymagania są z kolei inne. Najczęściej obejmują możliwość skanowania powierzchni w celu zlokalizowania punktów referencyjnych. Znaczniki te są następnie wykorzystywane w określaniu pozycji i orientacji umieszczanego elementu.
Na podstawie tych przykładów wyraźnie widać, że system wizyjny zaprojektowany do konkretnych zadań niekoniecznie sprawdzi się w innym zastosowaniu. Ponadto należy rozważyć koszty związane z wdrożeniem systemu, integracją z istniejącą infrastrukturą, konserwacją, ewentualnymi modyfikacjami oraz uaktualnianiem oprogramowania.
ELEMENTY SKŁADOWE SYSTEMU WIZYJNEGO
Zasadnicze elementy systemu wizyjnego (rys. 1) obejmują kamerę, oświetlenie i elementy optyczne (obiektyw), urządzenia do akwizycji oraz przetwarzania obrazu, istotnym składnikiem jest też oprogramowanie. Często wraz z systemem stosowane są dodatkowe akcesoria – np. manipulatory pozwalające na obserwację elementu z różnych kierunków.
Niektóre systemy wykorzystują kamery analogowe. Wówczas niezbędne jest urządzenie pośredniczące pomiędzy kamerą i komputerem, czyli tzw. frame grabber. Obecnie coraz powszechniej używane są kamery cyfrowe komunikujące się bezpośrednio z komputerem. W niektórych aplikacjach stosuje się rozwiązanie jeszcze bardziej zaawansowane technicznie, którym są tzw. kamery inteligentne.Stanowią one samodzielny, zintegrowany system wizyjny.
Bez względu na stopień zaawansowania systemu, w każdym przypadku zasadniczą rolę odgrywa odpowiednie oświetlenie i wykorzystanie optyki dobranej stosownie do danej aplikacji. Jakość kontroli obiektów zależy bowiem w dużym stopniu od jakości uzyskanego obrazu. Dlatego poniżej skupiono się właśnie na opisie dwóch wymienionych elementów składowych systemów wizyjnych.
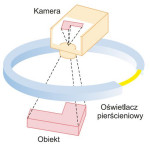
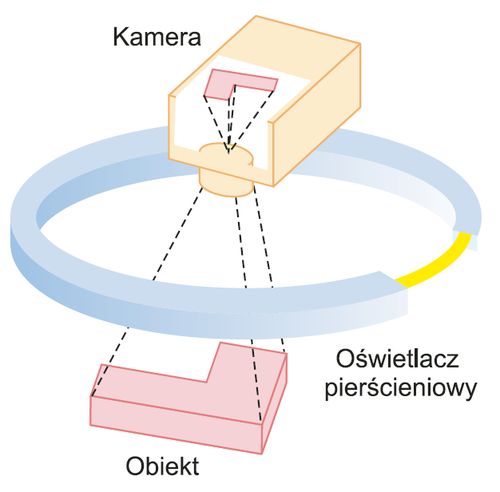
Rys.2. Oświetlacz w postaci pierścienia LED
CZĘŚĆ I: OŚWIETLENIE
Istotne znaczenie dla jakości uzyskanego obrazu ma odpowiedni dobór układu oświetlenia elementu, które decyduje o tym, w jaki sposób obraz zarejestruje kamera. Przy doborze oświetlaczy powinny być brane pod uwagę m.in. geometria obiektu, struktura jego powierzchni oraz charakterystyczne cechy całego systemu.
Układ oświetlenia powinien zapewnić odpowiedni kontrast oraz minimalizować rejestrację artefaktów, które mogą prowadzić do błędnych wniosków w analizie obrazu. Stosowane są rozmaite modele oświetlaczy, m.in. układy w konfiguracji pierścienia (rys. 2) lub prostokątnej matrycy z diod LED.
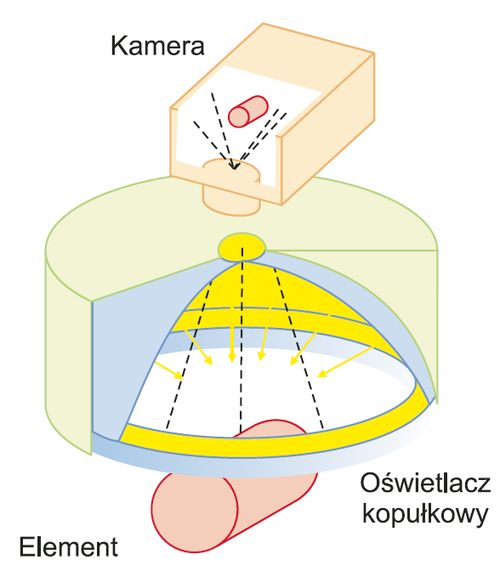
W przypadku obiektów o wypukłym kształcie i błyszczącej powierzchni zalecane jest wykorzystanie oświetlaczy o kształcie kopuły (rys. 3).
Innym często stosowanym rozwiązaniem jest wykorzystanie efektu stroboskopowego. Oświetlenie poruszającego się obiektu światłem migającym pozwala uzyskać wrażenie jego zatrzymania. Trudności związane z realizacją takiego układu mogą być związane z koniecznością zsynchronizowania modulacji światła z ruchem obiektu.
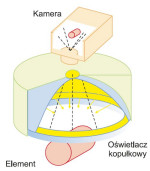
Rys.3. Oświetlacze kopułkowe zapewniają rozproszone oświetlenie obiektu, które ogranicza powstawanie rozbłysków światła
ŹRÓDŁA ŚWIATŁA
W systemach wizyjnych wykorzystywane są różne światła, przy czym najpopularniejszym obecnie rozwiązaniem jest użycie diod LED. Ich zaletą jest możliwość formowania układów w różnych konfiguracjach, zarówno w trybie pracy ciągłej, jak i w oświetleniu stroboskopowym.
Z drugiej strony problemem może być oświetlenie dużych powierzchni, ponieważ wymaga to matrycy złożonej z dużej liczby diod. Jednokolorowe oświetlenie zapewniane przez diody może być w niektórych aplikacjach zaletą. Z kolei w innych może utrudniać obserwację charakterystycznych cech obiektu.
Inne, równie popularne rozwiązania wykorzystują świetlówki oraz lampy halogenowe. W tym drugim przypadku do transmisji strumienia świetlnego stosuje się światłowody.
Zaletą takiego podejścia jest ograniczenie wpływu emisji ciepła, która jest charakterystyczna dla lamp tego typu. Wykorzystanie światłowodów pozwala budować układy w różnych konfiguracjach oraz ułatwia wymianę źródła światła w razie jego awarii.
Kolejnym często stosowanym źródłem światła są laserowe generatory linii, pomocne przy wymiarowaniu elementów. Oprócz różnorodnych źródeł światła w systemach inspekcji wizyjnej są wykorzystywane różne techniki oświetlania obiektów.
Automatyzacja napełniania zbiorników substancjami toksycznymi

W przypadku pracy z substancjami toksycznymi priorytetem jest zapewnienie bezpieczeństwa. Nie dotyczy to jedynie ograniczenia kontaktu pracowników z niebezpiecznym medium poprzez pełną automatyzację procesu napełniania zbiorników. Równie ważne jest zagwarantowanie, aby dana substancja trafiła do właściwego pojemnika w odpowiedniej ilości.
Przykładem firmy, która od lat zajmuje się dostarczaniem urządzeń do napełniania zbiorników różnego typu, jest niemieckie przedsiębiorstwo Feige Filling.
W 2006 roku firma wprowadziła na rynek nowy, w pełni zautomatyzowany system Robot-Filler, który wyposażony jest w czujnik wizyjny Cognex In-Sight 5401. Czujnik zamontowany jest bezpośrednio na ramieniu robota, oświetlenie zrealizowano przy użyciu pierścienia złożonego z 8 diod LED.
Jedną z głównych funkcji robota jest zlokalizowanie zatyczki zbiornika. Ponieważ zatyczki nie znajdują się w środku pokrywy, ale są rozmieszczone blisko krawędzi, ich pozycję trzeba określać w zależności od ustawienia zbiornika. Bez systemu wizyjnego szybkie i bezpieczne otwieranie, napełnianie i zamykanie zbiornika byłoby niemożliwe.
W aplikacji wykorzystano oprogramowanie wizyjne z funkcją rozpoznawania wzorca. Gdy zatyczka zostaje zlokalizowana, rozpoczyna się proces napełniania zbiornika. W pierwszej kolejności ramię robota podnosi narzędzie wykorzystywane do odkręcenia zatyczki i odkłada ją na specjalną podstawkę. Następnie sięga po kolejne narzędzie i precyzyjnie reguluje zawór napełniający zbiornik.
Bez udziału człowieka robot może sterować napełnianiem pojemnika, co znacznie przyspiesza cały proces. W ten sposób zwiększa się także bezpieczeństwo pracowników, ponieważ obszar, w którym robot pracuje, może zostać odseparowany od innych pomieszczeń.
Po zakończeniu napełniania zbiornika ramię robota podnosi zatyczkę z podstawki i zakręca zbiornik. Wyposażenie robota w czujnik wizyjny sprawia, że na podstawie kodu umieszczonego na zbiorniku może on zidentyfikować każdy kontener. System wizyjny minimalizuje więc też prawdopodobieństwo pomyłki napełnienia zbiornika nieodpowiednią substancją.
|