Rys.1. Oferta polskich dostawców w zakresie podzespołów bezpieczeństwa
Pierwsze roboty przemysłowe powstały w latach 50. ubiegłego stulecia i wkrótce zostały wykorzystane przez koncern General Motors w linii montażowej samochodów, gdzie wykonywały nieskomplikowane, ale uciążliwe dla ludzi operacje. Prace nad nowymi modelami robotów kontynuowano w kolejnych latach, a pod koniec lat 70. rozpoczęto masową produkcję manipulatorów do zadań wymagających większej precyzji – np. montażu urządzeń elektronicznych. Kolejnym punktem zwrotnym okazało się zwiększenie mocy obliczeniowej i szybkości przetwarzania urządzeń sterujących, dzięki czemu w sterowaniu robotami zaczęto wykorzystywać również dane z wielu czujników, w tym wizyjnych, wykorzystujących złożone algorytmy przetwarzania obrazu.

Konrad Grohs
Fanuc Robotics Polska
- Z jakimi czujnikami integrowane mogą być roboty?
Roboty mogą być integrowane z szeregiem rodzaju czujników. W ostatnich miesiącach coraz większym zainteresowaniem cieszą się systemy wizyjne i czujniki siły. Systemy wizyjne służą do identyfikacji położenia i orientacji kątowej elementów, które mają być chwytane przez ramię robota. Zastosowanie czujników siły zaś pozwala systemowi robota na identyfi- kację przyłożonej do chwytaka robota siły lub momentu, a następnie na inteligentne poszukiwanie właściwej dla danego procesu trajektorii ruchu. Firma Fanuc samodzielnie produkuje zarówno systemy wizyjne oraz czujniki siły, a do oferowanych przez nią robotów podłączyć można systemy wizyjne i czujniki również innych producentów.
- W jakich aplikacjach zastosowano rozwiązania łączące roboty i systemy wizyjne oraz czujniki siły?
Systemy wizyjne stosowane są w tzw. operacjach „pobierz-ułóż” – np. pobieranie czekoladek z ruchomej linii produkcyjnej i układanie w bombonierkach oraz operacjach załadunku maszyn. Przykładem na te ostatnie jest pobieranie wytłoczonego wcześniej arkusza blachy i załadunek do procesu spawania. Czujniki siły stosowane są najczęściej w operacjach precyzyjnego montażu. Mniej precyzyjną kontrolę siły (np. w operacjach szlifowania) można realizować za pomocą funkcji soft-load. Funkcja ta pozwala sterować pracą robota z pomiarem siły w zadanym kierunku, natomiast pomiar odbywa się bez dodatkowych czujników siły. Do pomiaru siły w kierunkach zgodnych z kartezjańskim układem współrzędnych wykorzystywane są złożone pomiary na poszczególnych osiach robota.
|
SYSTEMY WIZYJNE W ROBOTACH PRZEMYSŁOWYCH

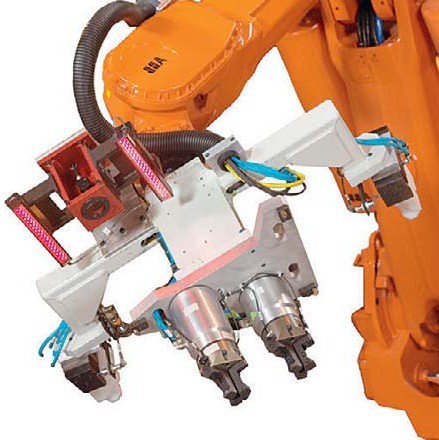
Fot.1. System ABB TrueViewsteruje kamerą oraz oświetleniem zamontowanym na ramieniu robota, tak by uzyskać obraz o odpowiednich parametrach
Roboty i systemy wizyjne zaczęto łączyć już w latach 70. ubiegłego wieku. Okazało się wówczas, że połączenie to znacznie zwiększa możliwości robotów przemysłowych, które dotychczas nie były brane pod uwagę przy realizacji niektórych zadań. Implementacja wyłącznie sterowania pozycyjnego zazwyczaj okazywała się niewystarczająca, gdy zmiany otoczenia musiały wpływać na pracę robota. Rozpowszechnieniu systemów wizyjnych w robotyce sprzyjał także rozwój przemysłowych standardów komunikacji oraz metod kalibracji systemów wizyjnych. Nie bez znaczenia były też malejące koszty wdrożenia obu technologii.
2D, 2,5D I 3D
Jedną z najczęściej spotykanych metod integracji wizji z robotem jest system wizyjny 2D monitorujący ruchomą taśmę przenośnikową z elementami przeznaczonymi do pakowania, paletyzacji, sortowania lub montażu. Przykładem może być linia paczkowania ciastek. O ile odpowiada to wymaganiom aplikacji przy każdym stanowisku robota można zamontować czarno-białą kamerę. Gdy ciastka przesuwają się na taśmie, system wizyjny przetwarza obraz z kamery, wykorzystując algorytm dopasowania wzorca do sprawdzenia kształtu oraz ułożenia ciastka. Po zakończeniu analizy informacja zwrotna jest przesyłana do robota, który przenosi ciastka na tackę.
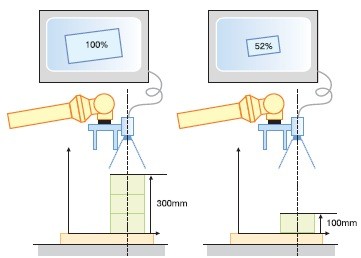
Systemy z pojedynczą kamerą wykorzystać również można do zbierania informacji przestrzennej. Przykładem jest wyjmowanie kolejnych detali z pojemnika. W miarę jak ubywa elementów na stosie, obiekt na wierzchu wydaje się mniejszy. Na podstawie tej pozornej zmiany rozmiaru elementu system wizyjny oblicza wysokość stosu i przesyła tę informację do robota, który podnosi kolejne elementy. Jest to przykład systemu wizyjnego 2,5D. Często do kierowania ruchem robota niezbędne jest też określenie położenia obiektu w przestrzeni trójwymiarowej. W takim wypadku wykorzystuje się systemy wizyjne 3D, składające się zazwyczaj z zestawu kilku współpracujących kamer. Znajdują one zastosowanie np. w ramach zrobotyzowanych stanowisk spawania, klejenia, uszczelniania, malowania, napełniania i opróżniania pojemników oraz montażu szyb, dachów, modułów przednich i innych części pojazdów.
Wojciech Roczon
Balluff
- W jakich zastosowaniach integruje się roboty z systemami wizyjnymi i czujnikami? Jakiego rodzaju są to elementy?
Zastosowanie czujników w aplikacjach z robotami przemysłowymi podyktowane jest głównie złożonością zadań, przed którymi staje integrator. Głównym zadaniem zewnętrznych elementów jest dostarczenie do systemów sterowania robota informacji o aktualnym stanie produktu lub procesu. W tym zakresie możliwe jest dokonanie wstępnej kontroli określonych cech produktu, kontroli liczby pobranych elementów lub samego pobrania. Stosowane są tu niemal wszystkie dostępne na rynku technologie detekcji obiektów – rozpoczynając od prostej detekcji czujnikami indukcyjnymi, a kończąc na analogowych czujnikach optycznych lub pojemnościowych. Z uwagi na złożoność niektórych aplikacji liczba zamontowanych na ramieniu robota czujników może być duża. Pojawiający się problem z przesyłem zasilania lub sygnałów z tych urządzeń został rozwiązany przez firmę Balluff. Indukcyjny system do bezprzewodowego przesyłu zasilania i sygnałów BIC Remote daje swobodę zastosowania czujników i dodatkowych urządzeń wykonawczych.
- Jakie są najczęstsze zastosowania omawianych systemów?
Standardowym przykładem integracji robota z urządzeniami peryferyjnymi jest wykorzystanie systemów wizyjnych do określenia typu produktu oraz jego pozycji w układzie współrzędnych robota. Można tu wyróżnić aplikacje pick-and-place, w których elementy pobierane są bezpośrednio z transportu i przekazywane do następnego etapu procesu produkcji. Opis przykładu takiego zastosowania znajdą Państwo na łamach tego wydania. Drugim typem aplikacji jest wykorzystanie systemu lub czujnika wizyjnego do kontroli cech obiektu. W tej aplikacji element wizyjny może być zamontowany na układzie transportowym, w miejscu montażu produktu oraz na samym ramieniu robota.
- Czy istnieją alternatywne metody detekcji i określania typów przedmiotów?
Sposobem na określenie typu produktu poza systemami wizyjnymi może być również wykorzystanie przemysłowych systemów RFID. W tym przypadku informacja zawarta na nośniku danych dołączonym do produktu lub palety transportowej może dostarczyć do systemu informację o typie i parametrach produktu. Dane te mogą posłużyć do wyboru trajektorii ruchu robota.
|
STEROWANIE WIZYJNE
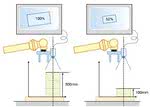
Sterowanie ruchem robotów na podstawie informacji wizyjnej można wyjaśnić przez analogię do zachowania człowieka, który chce nawlec nić na igłę. Najpierw patrzy on jednocześnie na oba obiekty, próbując ocenić ich wzajemne położenie i odległość, a następnie na podstawie tej obserwacji przeciąga nić przez oczko igły. Podobnie system wizyjny najpierw rejestruje obraz i określa pozycję obiektu względem manipulatora robota. W oparciu o te dane w sterowniku robota wyznaczany jest kierunek oraz odległość, jaką ramię robota powinno pokonać, by zbliżyć się do obiektu. W czasie, gdy robot zmienia pozycję, wykonywane są kolejne zdjęcia, a odpowiednie oprogramowanie nieustannie je analizuje, aktualizując dane przesyłane do sterownika do momentu zakończenia zadania. Zasada jest prosta, jednak w praktyce jest to złożony proces, w którym należy uwzględnić specyfikę każdego elementu w systemie obiekt–kamera–robot.
Roboty w pakowaniu

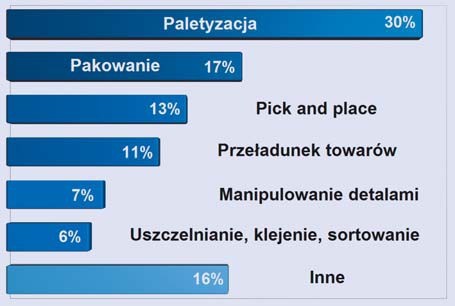
Rys.1. Najczęstsze aplikacje robotów
Packing Machinery Manufacturers Institute przygotował w 2008 roku raport „Robotics: Usage and Trends in Packaging Applications”, w którym przedstawiono wnioski z badania na grupie 300 dostawców zautomatyzowanych rozwiązań oraz ich odbiorców, wykorzystujących roboty w ramach linii pakowania. Jak się okazało, roboty najczęściej realizują zadania paletyzacji/ depaletyzacji (patrz rys. 1), pakowania detali do pudełek i na tacki oraz podnoszenia i układania elementów na taśmie.

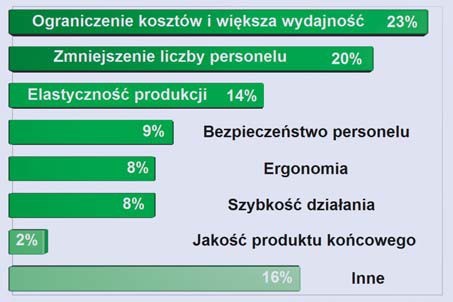
Rys.2. Najważniejsze powody automatyzowania linii pakowania
Większość ankietowanych (23%) decyzję o wykorzystaniu do tych zadań robotów uzasadniała głównie ograniczeniem kosztów i zwiększeniem wydajności produkcji oraz zmniejszeniem liczby personelu obsługującego daną linię. Ważna była też elastyczność produkcji oraz wzrost bezpieczeństwa pracowników (rys. 2). Badanie PMMI pokazało też, że zainteresowanie robotami rośnie.
Jeszcze kilka lat temu zaledwie 9,5% wszystkich linii pakowania wykorzystywało roboty. Stopniowo jednak rozwiązanie to stawało się coraz popularniejsze i w 2008 roku już 17,4% linii tego typu zostało zrobotyzowanych. Według prognoz PMMI tendencja ta utrzyma się i w 2013 roboty przemysłowe będą już obsługiwać blisko 42% linii pakowania.
|