PODSTAWOWE FUNKCJE SYTEMU DCS

Rys. 1. Schemat podwójnego obwodu bezpieczeństwa
W skład systemu DCS wchodzą dwie podstawowe funkcje – Emergency Stop Control, bazująca na podwójnym obwodzie przedstawionym na rysunku 1, oraz T1 Mode Speed Check. Pierwsza z nich wyłącza zasilanie silników w zależności od warunków będących jej bezpośrednią przyczyną wywołania. Może nią być:
- wyłącznik bezpieczeństwa E -Stop na panelu operatora,
- wyłącznik bezpieczeństwa E -Stop na panelu Teach Pendant,
- zewnętrzny wyłącznik bezpieczeństwa,
- bariera bezpieczeństwa Fence,
- wyłącznik deadman (zabezpieczenie w razie porażenia prądem elektrycznym),
- wejście bezpieczeństwa SVOFF (z podwójnym obwodem bezpieczeństwa),
- wejście NTED działające równolegle z wyłącznikiem deadman,
- przełącznik trybu pracy.
ZAAWANSOWANE FUNKCJE SYSTEMU DCS
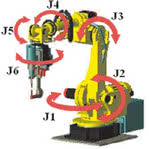
Rys. 2. Poruszanie poszczególnymi osiami robota – reprezentacja Joint |
Rys. 3. Ilustracja kartezjańskiego układu współrzędnych |

Rys. 4. Oszczędność miejsca przy wykorzystaniu funkcji Position and Check Function |
Position and Speed Check Function sprawdza wcześniej zdefiniowaną bezpieczną prędkość i pozycję pracy robota. Do komponentów tego systemu należą:
- Joint Position Check Function – sprawdza, czy pozycja robota w układzie poruszania poszczególnymi osiami obrotów niezależnie (tzw. reprezentacji Joint przedstawionej na rys. 2), określona indywidualnie dla każdej z osi robota, znajduje się w lub poza zdefi niowaną strefą bezpiecznej pracy. W przypadku wykroczenia poza ustalony obszar robot zostaje zatrzymany. Funkcja może być aktywowana dla każdej osi za pomocą sygnałów wejściowych safety OPSFTY1-4.
- Joint Speed Check Function – sprawdza, czy pozycja robota w układzie poruszania poszczególnymi osiami obrotów niezależnie (w reprezentacji Joint), określona indywidualnie dla każdej osi robota, wykracza poza zdefiniowane granice. W przypadku przekroczenia dopuszczalnej wartości robot zostaje zatrzymany. Funkcja może być aktywowana dla każdej z osi za pomocą sygnałów wejściowych safety OPSFTY1-4.
- Cartesian Position Check Function – kontroluje, czy pozycja centralnego punktu narzędzia (np. chwytaka) TCP znajduje się w lub poza zdefiniowaną strefą bezpiecznej pracy robota w przypadku poruszania się w prostoliniowym układzie współrzędnych o parach prostopadłych osi, tzw. układzie kartezjańskim (rys. 3). W przypadku wykroczenia poza dopuszczalny obszar robot zostaje zatrzymany. Funkcja może być aktywowana dla każdej grupy ruchu za pomocą sygnałów wejściowych safety OPSFTY1-4.
- Cartesian Speed Check Function – kontroluje, czy prędkość centralnego punktu narzędzia (np. chwytaka) TCP w układzie kartezjańskim wykracza poza zdefiniowane granice. W przypadku przekroczenia dopuszczalnej wartości robot zostaje zatrzymany. Funkcja może być aktywowana dla każdej grupy ruchu za pomocą sygnałów wejściowych safety OPSFTY1-4.
Sprawdzanie bezpiecznej pozycji robota wykorzystuje się w sytuacjach, gdy ruch robota musi być ograniczony ze względu na limity miejsca lub procesu, a zasięg robota jest większy niż aktualnie wymagany w procesie (co pozwala na uzyskanie znaczących oszczędności miejsca w hali produkcyjnej, elastyczność w konfiguracji systemu, redukcję kosztów sprzętu i wzrost niezawodności).
Rysunek 4 prezentuje wyżej opisaną sytuację na przykładzie robota M-2000iA o zasięgu obejmującym powierzchnię 9*9=81m2, w której oszczędność miejsca wynosi około 30m2. Obszar o takiej powierzchni może być zagospodarowany i wykorzystany na linię lub drogę transportową. Poza oszczędnością miejsca, wyznaczenie obszaru bezpiecznej pracy robota zapewnia również wysoki poziom bezpieczeństwa.
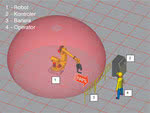
Gdy w obszarze pracy robota znajduje się jakiekolwiek pole, gdzie niezbędna jest ingerencja człowieka (np. w celu załadunku detali lub zmiany narzędzia), istnieje możliwość zdefiniowania strefy bezpiecznej. Po sygnalizacji próby ingerencji do wnętrza tej strefy poprzez otwarcie bariery, system zabezpieczający aktywuje się i nie pozwala robotowi wejść w jej zakres.
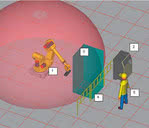
Rys. 5. Ogólna ilustracja zagadnienia |

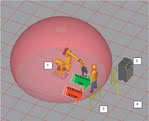
Rys. 6. Wejście robota w strefę bezpiecznej pracy bez próby ingerencji człowieka |

Rys. 7. Zatrzymanie robota podczas próby wejścia w strefę bezpiecznej pracy przy próbie ingerencji człowieka |
Gdyby nie rozwiązanie programowe, do realizacji tego zagadnienia zobrazowanego kolejno na rysunkach 5, 6 i 7 niezbędne byłoby użycie przeznaczonych do tego celu dodatkowych zewnętrznych urządzeń takich jak maty czy kurtyny. W podobny sposób działa funkcja sprawdzenia bezpiecznej prędkości, co zobrazowane zostało na rysunkach 8 i 9. Gdy operator znajduje się poza barierą, robot może pracować z pełną prędkością. Kiedy bariera zostaje otwarta, funkcja kontroli zostaje załączona.
W sytuacji, w której rzeczywista wartość prędkości wykracza poza wcześniej zdefiniowaną, robot zostaje zatrzymany. Funkcja DCS Position and Speed Check może zostać zdefiniowana zarówno w układzie Joint, jak i kartezjańskim. Poprzez to czyni system jeszcze bardziej uniwersalnym.
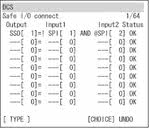
SAFE I/O CONNECT FUNCTION
Funkcja ta wykonuje operacje logiczne na wejściach/wyjściach bezpieczeństwa. Pozwala na sterowanie wyjściami płyty panelu operatora, sieci DeviceNet Safety lub Ethernet/IP Safety poprzez zmianę stanu poszczególnych parametrów funkcji Position and Speed Check. Safe I/O Connect pozwala na wykonanie do 64 takich operacji. Na rysunku 10 przedstawiono przykład jednej z możliwych operacji logicznych.
DEVICENET SAFETY FUNCTION
Funkcja ta pozwala na pracę robota jako urządzenia slave w zdefiniowanej sieci DeviceNet Safety oraz wymianę informacji dotyczących stanu sygnałów bezpieczeństwa z zewnętrznym urządzeniem systemu bezpieczeństwa pracującym w trybie master.
ETHERNET/IP SAFETY FUNCTION
Funkcja ta pozwala na pracę robota jako urządzenia adapter w zdefiniowanej sieci EtherNet/IP Safety oraz wymianę informacji dotyczących stanu sygnałów bezpieczeństwa z zewnętrznym urządzeniem systemu bezpieczeństwa pracującym trybie scanner.
Rys. 8. Ilustracja pracy robota z prędkością 100% |
Rys. 9. Aktywacja kontroli zadanej wartości prędkości X robota |
Rys. 10. Ilustracja operacji logicznych funkcji Safe I/O Connect |
PODSUMOWANIE
Nowe oprogramowanie DCS uzyskało certyfi kat bezpieczeństwa TUV w klasie 3 lub 4. Pozwala na zaprojektowanie systemu zabezpieczającego, z wykorzystaniem samego robota do określonych funkcji bezpieczeństwa. Reasumując, poprzez zastąpienie tradycyjnych metod zabezpieczenia przestrzeni roboczej systemem DCS, użytkownicy robotów Fanuc mogą:
- zaoszczędzić przestrzeń roboczą w hali produkcyjnej,
- uzyskać efektywne wykorzystanie przestrzeni pracy robota,
- zminimalizować koszty zastosowanego sprzętu,
- zwiększyć niezawodność systemu,
- aktywować i dezaktywować strefy bezpieczeństwa ze źródeł zewnętrznych, takich jak sterowniki PLC.
Wysoki poziom bezpieczeństwa, elastyczność i zarazem oszczędność!
Paweł Kwacz
Fanuc Robotics Polska












