
Pierwsze popularne systemy na rynku automatyki budynków należały do grupy tzw. systemów zamkniętych. Ich instalacja stanowiła domenę nielicznych dostawców i wiązała się z poniesieniem wysokich kosztów, informacje techniczne związane z wykorzystanymi elementami objęte były tajemnicą producenta. Powodowało to, że automatyzowane były zwykle duże budynki, takiej jak biurowce, budynki użyteczności publicznej, lotniska czy stadiony.
Od końca lat osiemdziesiątych zaczęły pojawiać się nowe rozwiązania, należące do grupy tzw. systemów otwartych. Charakteryzują się one upublicznionym protokołami i architekturami, które zatwierdzone są przez producentów, integratorów i instytucje normalizacyjne. W tym przypadku praktycznie każda firma może wyprodukować i wprowadzić na rynek urządzenie lub oprogramowanie, które stanie się częścią systemu otwartego.
Powoduje to, że rozwój omawianej dziedziny jest coraz szybszy i coraz więcej firm, a koszty instalacji ponoszone przez użytkowników końcowych – mniejsze. Dodatkowo dużą zaletą prezentowanych systemów jest możliwość ich wzajemnej współpracy, co pozwala na dużą elastyczność w przypadku projektowania lub modernizacji instalacji w budynku.
CZĘŚĆ I: LonWorks
System LonWorks zaprojektowany został przez firmę Echelon przy współpracy z Toshiba i Motorola. Jego elementami składowymi są protokół komunikacyjny LonTalk, dedykowany kontroler Neuron Chip oraz specjalnie zaprojektowany język programowania będący zmodyfikowaną wersją ANSI C do pracy w systemach sterownych zdarzeniami. Kolejne wersje systemu LonWorks powstawały od 1988 roku, jednak dopiero w 1999 roku specyfikacja protokołu LonTalk została udostępniona publicznie. LonWorks jest standardem objętym normą europejska EN 14908.
Realizacje fizyczne
W omawianym systemie zdefiniowano wszystkie warstwy modelu ISO/OSI (patrz tab. 1). Podstawowym medium jest jeden z powszechnie stosowanych typów przewodów dwuparowych ekranowanych. Można wykorzystywać skrętkę typu Level IV, skrętkę stosowaną w systemie KNX, standardowe przewody Belden lub Cat 5.
W przypadku stosowania przewodów dane są transmitowane z prędkością 78,125b/s. Do komunikacji w sieci LonWorks mogą być także wykorzystywane inne media – sieć energetyczna (LonWorks PL), światłowód (LonWorks FO) oraz fale radiowe (LonWorks RF). Umożliwiono także stosowanie tunelowania IP (LonWorks/IP).
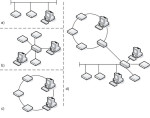
LonWorks pozwala na realizację topologii mieszanej trzech topologii połączeń sieciowych – linii, gwiazdy i pierścienia (rys. 1). Do jednego segmentu sieci podłączone może być do 128 urządzeń, a w zależności od wykorzystanego przewodu magistrali oraz rodzaju topologii długość jednego segmentu może wynosić od 320 do 2200 metrów. W przypadku zwiększenia liczby urządzeń w podłączonych do jednej sieci istnieje możliwość łączenia segmentów używając repeaterów lub routerów.
Realizacja logiczna
Każdy węzeł w sieci charakteryzuje się określonym zbiorem adresów. Pierwszym z nich jest adres fizyczny, czyli unikatowy adres urządzenia Neuron Chip. Kolejnym jest adres logiczny charakteryzujący urządzenie w konkretnej sieci, składający się z identyfikatora domeny (do 32385 urządzeń), identyfikatora podsieci (do 127 urządzeń używających jednego kanału lub kilku kanałów połączonych repeaterami, na jedną domenę przypada 255 podsieci) oraz identyfikator węzła w danej podsieci.
W określonej domenie możliwe jest wydzielenie 256 grup węzłów niezależnie od ich fizycznego położenia, natomiast sama domena charakteryzowana jest przez tzw. adres grupowy. Jeśli nie jest wymagane potwierdzenie odebrania pakietu, grupa może mieć nieograniczoną liczbę węzłów, natomiast w przypadku wymagania potwierdzenia może zawierać 64 węzły. Ostatnim z adresów jest tzw. adres typu broadcast, który identyfikuje wszystkie urządzenia w podsieci lub wszystkie urządzenia w domenie.
W przypadku przesyłania informacji z wykorzystaniem istniejącej instalacji elektroenergetycznej możliwa jest praca urządzeń w pasmach o częstotliwości 110-125kHz oraz 125-140kHz z maksymalną prędkością 4800b/s. Stwierdzono, że możliwa jest równoczesna, niezakłócona praca systemów KNX i LonWorks w paśmie 125-140kHz, co jednak wiąże się ze znacznym spadkiem prędkość transmisji.
W celu określenie dostępu do magistrali wykorzystywany jest specjalnie opracowany algorytm nazywany predykcyjnym p-ciągłym wspólnym dostępem urządzeń do magistrali z wykrywaniem nośnej (predictive P-persistent CSMA). Pozwala on poprzez przewidywanie obciążenia sieci na optymalne wykorzystanie kanału informacyjnego i unikanie kolizji. W protokole LonTalk każde urządzenie nasłuchuje wszystkich pakietów przechodzących przez kanał transmisyjny i jeżeli pakiet skierowany jest do niego sprawdza, czy jest to rozkaz, zmienna sieciowa i wysyła potwierdzenie do urządzenia nadającego.
Węzły sieci

Podstawowym elementem sieci LonWorks jest węzeł, czyli urządzenie zawierające Neuron Chip i posługujące się protokołem LonTalk. Neuron Chip jest mikroprocesorowym kontrolerem, który realizuje funkcje odpowiadające za rozwiązywanie konfliktów dostępu do wspólnej magistrali, adresowanie i dostarczanie przesyłek sieciowych, zabezpieczenie transmisji, formatowanie danych przesyłanych przez sieć, autoryzację węzłów, zapewnienie maksymalnej przepustowości łączy.
Ma on unikatowy, niepowtarzalny 48 bitowy numer identyfikacyjny (adres fizyczny), który przydzielany przez komisję firmy Echelon Corporation. Nadzór nad prawidłową implementacją protokołu LonTalk w urządzeniach z Neuron Chip pozwala na zagwarantowanie zgodności komunikacji pomiędzy urządzeniami pochodzącymi od różnych producentów.
Węzeł komunikuje się z magistralą poprzez urządzenie nadawczo/odbiorcze, które pozwala na fizyczne połączenie z medium transmisyjnym i tłumienie zakłóceń pojawiających się przy przesyłaniu danych. Schemat węzła w sieci LonWorks pokazano na rys. 2. Dane pomiędzy węzłami przesyłane są w postaci standardowych zmiennych sieciowych (SNVT – Standard Network Variable Types) przechowujących np. wielkości mierzone przez czujniki lub wielkości zadane urządzeń wykonawczych.
Długość standardowych zmiennych sieciowych wynosi 32 bity i może zawierać wartość binarną, dowolną liczbę oraz zmienne łańcuchowe w kodzie ASCII. Zmienne dzielone są na wyjściowe i wejściowe. Przekazywanie danych odbywa się przez powiązanie przez program zarządzający siecią zmiennej wyjściowej urządzenia nadającego ze zmienną wejściową urządzenia odbierającego.
CZĘŚĆ II: KNX/EIB

Europejska Magistrala Instalacyjna (European Installation Bus, EIB) to nazwa systemu wspieranego przez czołowych europejskich producentów i rozwijany jako otwarta specyfikacja od 1990 roku przez stowarzyszenie EIB (European Installation Bus Association, EIBA).
W 2002 roku dokonano połączenia standardów EIB, Batibus oraz EHS (European Home System), w wyniku którego powstał jednolity, europejski, standard KNX. Wszystkie organizacje odpowiedzialne za połączone technologie utworzyły stowarzyszenie Konnex. Specyfikacja EIB istnieje wewnątrz standardu KNX jako zbiór profili o obiegowej nazwie „KNX/EIB” i jest standardem objętym europejską normą EN 50090 (KNX).
Architektura systemu

KNX/EIB składa się z 5 warstw zgodnych z modelem ISO/OSI (bez warstwy sesji i prezentacji, patrz tab. 1). Podstawowym medium jest tutaj przewód magistralowy będący wariantem miedzianego przewodu dwuparowego, ekranowanego typu skrętki ekranowanej – tzw. KNX TP1.
Zgodnie z pierwotnymi założeniami KNX/EIB charakteryzuje się odseparowaniem obwodów zasilania elektroenergetycznego urządzeń od obwodów systemu sterowania. Oprócz przesyłania sygnału sterującego, magistralą przesyła się także zasilanie 29VDC, które pochodzi z zasilacza z transformatorem mającym podwójną izolację i charakteryzującym się brakiem połączeń z przewodami ochronnymi.
W omawianym systemie dane transmitowane są z prędkością 9600b/s. KNX TP1 pozwala realizację trzech topologii połączeń sieciowych – linii, gwiazdy oraz pierścienia i łączenie ich w dowolny sposób, czyli w opisanej wcześniej topologii mieszanej (rys. 1). Każdy segment skrętki może mieć maksymalną długość 1000 metrów, a podstawową częścią sieci KNX/EIB jest linia, która grupować może do 64 urządzeń magistralowych.
Typowymi urządzeniami magistralowymi, tzw. węzłami, są czujniki generujące sygnały odpowiadające mierzonym wielkościom fizycznym oraz urządzenia wykonawcze, które wykonują rozkazy otrzymywane z magistrali i sterujące określonymi odbiornikami.
Magistrala i adresowanie
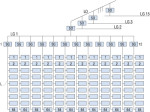
Magistrala charakteryzuje się jedną linią główną, do której w miarę rozbudowy sieci dołączane mogą być kolejne linie z wykorzystaniem tzw. sprzęgieł liniowych. W standardzie KNX/EIB jedna linia główna może łączyć ze sobą do 15 linii, tworząc tzw. obszar – dalsza rozbudowa systemu polega na dołączeniu następnych podobnych obszarów (łącznie do 15), które łączone są ze sobą linią obszarową z wykorzystaniem tzw. sprzęgieł obszarowych.
Sprzęgła takie zasilane są zawsze z linii niższej w hierarchii – sprzęgła liniowe z zasilacza swojej linii, sprzęgło obszarowe z zasilacza linii głównej, natomiast linia obszarowa nie musi mieć zasilacza jeśli poza liniami głównymi nie ma do niej przyłączonych innych urządzeń.
Sprzęgła służą do separacji galwanicznej poszczególnych linii oraz do odbierania telegramów, które są adresowane jedynie do urządzeń ograniczonych danym obszarem. Jeśli liczba urządzeń podłączonych do danej linii jest zbyt mała, istnieje możliwość jej rozbudowy o tzw. segment liniowy poprzez przyłączeniu w miejsce urządzenia o numerze 64 sprzęgła, tzw. repetytora liniowego, za którym budowana jest dodatkowa linia z możliwymi 64 dalszymi elementami.
W standardzie KNX/EIB istnieje możliwość rozbudowania linii o 3 segmenty liniowe, przy czym każdy segment liniowy musi mieć swój własny zasilacz. Największa instalacja może więc obsłużyć teoretycznie około 57 tys. urządzeń magistralowych. W systemie KNX istnieją dwa typy adresów – fizyczny i grupowy.
Pierwszy z nich to niepowtarzalny numer określający rzeczywiste położenie elementu w systemie, natomiast adres grupowy ma na celu określenie grupy urządzeń współpracujących i przyporządkowuje dany element do funkcji, jaką powinien spełniać. Dostęp urządzeń do magistrali określa zastosowana metoda wspólnego dostępu urządzeń do magistrali z wykrywaniem nośnej i unikaniem kolizji (CSMA/CA), gdzie o kolejności dostępu urządzenia do magistrali decyduje jego priorytet.
W przypadku równoczesnego nadawania sygnału przez dwa urządzenia o tym samym priorytecie, urządzenie o niższym adresie fizycznym (priorytecie) czeka na skończenie transmisji przez inne. Mechanizm taki, w połączeniu z adresowaniem grupowym, umożliwia utrzymanie wysokiej przepustowości sieci.
Budowa węzłów

KNX/EIB jest systemem otwartym, rozproszonym i wykorzystującym zdecentralizowany sieciowy system operacyjny. Strukturę zdecentralizowaną uzyskano przez wyposażenie wszystkich elementów realizujących komunikację w mikroprocesory zawierające wbudowany system odpowiedzialny za łączność z siecią i tzw. aplikację własną.
Głównym elementem węzła jest port magistralowy , który pod względem funkcjonalnym można podzielić na dwa moduły – komunikacji z magistralą i moduł sterownika (rys. 3). Moduł komunikacyjny odpowiada m.in. za sterowanie procesem wysyłania i odbioru danych, sprawdzanie poprawności przesyłanych telegramów, oddzielanie stałego napięcie zasilania magistrali od cyfrowych strumieni danych oraz ochronę portu magistralnego.
Moduł sterownika składa się z jednostki procesorowej CPU, pamięci oraz interfejsów użytkownika i komunikacji z siecią. Pamięć ROM zawiera oprogramowanie systemowe wpisane przez producenta, RAM wykorzystuje się do przechowywania i przetwarzanych chwilowych wartości systemu i aplikacji. Z kolei pamięć EEPROM, służy do przechowywania aplikacji obsługującej urządzenie oraz adresu fizycznego i grupowego węzła.
Poprzez sieć i bezprzewodowo
W specyfikacji omawianego standardu określony jest także sposób komunikacji z wykorzystaniem istniejących w budynku przewodów elektroenergetycznych (KNX PL).
W tym przypadku fala nośna o częstotliwości 50Hz zostaje zmodulowana przez pakiety informacji systemu z wykorzystaniem techniki modulacji sygnału sinusoidalnego o nazwie rozszerzone kluczowanie zmianą częstotliwości (Spread Frequency Shift Keying).
Istnieje możliwość pracy w dwóch zakresach częstotliwości: 90-125kHz (prędkość 1200b/s) oraz 125-140kHz (2400b/s). Podczas komunikacji z wykorzystaniem sieci elektroenergetycznej maksymalna odległość między dwoma urządzeniami bez stosowania repeatera wynosi 600 metrów.
W rzeczywistości jest ona jednak mniejsza, gdyż na komunikację mają istotny wpływ zaburzenia elektromagnetyczne i stan techniczny instalacji. Kolejnym medium komunikacyjnym określonym w specyfikacji KNX/EIB są fale radiowe (KNX RF).
Dla urządzeń tego typu przyjęto, że mają się one charakteryzować małym zasięgiem nadawania i odbioru (SRD – Short Range Devices) i wybrano pasmo wokół częstotliwości 868MHz. Jest ono dostępne w całej Europie, zapewniając wysoką niezawodność systemu, oraz niskie koszty jego eksploatacji.
Obecnie KNX RF zapewnia łączność jednostronną i dwustronną, co znacznie zwiększa jego elastyczność. Urządzeniom przydzielono odpowiednie pasma pracy w zależności od liczby cykli pracy na godzinę, a co za tym idzie prędkości.
Topologia KNX RF odpowiada tej określonej w specyfikacji KNX TP, przy czym linii TP odpowiada jeden kanał częstotliwości reprezentujący podsieć z 64 węzłami. Dopuszcza się stosowanie trzech kanałów w każdym paśmie częstotliwości. Urządzenia wykorzystujące komunikację radiową są rozróżniane przez adres fizyczny i pracę w tym samym zakresie częstotliwości.
Komunikację pomiędzy kanałami umożliwiają routery, których zasięg transmisji wynosi w otwartej przestrzeni około 300 metrów. W systemie KNX/EIB umożliwiono także udostępnianie pewnych usług sieciowych z wykorzystaniem tunelowania w sieci IP (EIBnet/IP).
CZĘŚĆ III: BACnet

Ostatni z omawianych systemów to BACnet, który jest rozwijany od 1987 roku przez organizację ASHRAE (American Society of Heating, Refrigerating and Air Conditioning Engineers). Pierwsza publicznie dostępna wersja BACnet pojawiła się w 1995 roku, system jest standaryzowany jako EN/ISO 16484-5.
Transmisja i topologia
BACnet składa się z 4 warstw zgodnych z modelem ISO/OSI – fizycznej, danych, sieci oraz aplikacji (patrz tab. 1). Standaryzuje on warstwę sieci i aplikacji, natomiast nie określa dokładnie dwóch pozostałych, co pozwala na elastyczne wykorzystanie różnych mediów transmisyjnych.
Mogą nimi być Ethernet (maksymalna prędkość transmisji 10Mb/s), ARCNET (19kb/s do 1o. W celu zwiększenia odległości pomiędzy segmentami wykorzystywane są repeatery lub mosty. Połączenia te nazywane są podsiecią BACnet i charakteryzującą się dwubitowym adresem.
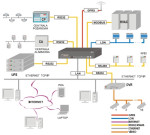
Każde urządzenie w podsieci BACnet ma również lokalny adres MAC (Medium Access Control), który wraz z adresem podsieci jednoznacznie określa położenie urządzenia w sieci. Powstałe podsieci są łączone z wykorzystaniem routerów w sieć główną tzw. intersieć BACnet (BACnet Internetwork), której przykładowa budowa została przedstawiona na rys. 7.
Warstwa aplikacji i obiekty

W systemie BACnet warstwę tą można podzielić na dwie zależne od siebie części – model informacji zawartej w urządzeniu automatyki budynku oraz grupę funkcji wykorzystywanych do wymiany informacji pomiędzy urządzeniami. Wewnętrzna budowa i konfiguracja urządzenia działającego w sieci BACnet zależy od jego producenta, tak więc w standardzie nie ma definicji tych elementów, co również dotyczy struktur danych i logiki sterowania.
W celu umożliwienia wymiany danych pomiędzy urządzeniami pochodzącymi od różnych producentów możliwa jest komunikacja poprzez zdefiniowanie zbioru abstrakcyjnych struktur danych – tzw. obiektów, które określają sposób identyfikacji i dostępu do informacji bez wymagania wiedzy o budowie urządzenia.
Urządzenie jest więc reprezentowane w BACnet jako zbiór obiektów, których własności reprezentują różne aspekty rozwiązań sprzętowych, programowych oraz działania urządzenia. Mapowanie pomiędzy standardowymi obiektami BACnet a odpowiadającymi im rzeczywistymi danymi i procesami jest pozostawiona producentowi urządzenia.
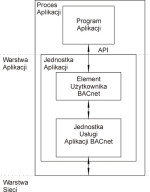
Oprogramowanie komunikacyjne wewnątrz urządzenia interpretuje zapytania o określoną informację dotyczącą obiektów abstrakcyjnych i tłumaczy informację z rzeczywistych struktur danych urządzenia. Funkcjonalność ta nazywana procesem aplikacji.
Każdy proces jest podzielony na program aplikacji oraz jednostkę aplikacji, przy czym program jest częścią aplikacji zewnętrznej i nie jest określony w specyfikacji, natomiast jednostka odnosi się do części wewnątrz warstwy aplikacji i jest odpowiedzialna za komunikację z urządzeniami w sieci BACnet. Zawiera ona zbiór usług i jest odpowiedzialna za implementację API oraz procedur każdej usługi (patrz rys. 8).
W standardzie BACnet zdefiniowano sześć klas zgodności określających zbiór wymaganych usług aplikacyjnych. Pozwalają one określić możliwości urządzeń w sieci BACnet, zgodnie z rosnącym numerem klasy, od prostego czujnika (klasa 1) do uniwersalnego sterownika (klasa 6).
Każdy obiekt zawiera zbiór własności, przy czym wykorzystywany jest odpowiedni kod specyfikującyć Ethernet (maksymalna prędkość transmisji 10Mb/s), ARCNET (19kb/s do 10 Mb/s), Master-Slave/Token-Passing realizowany poprzez RS-485 (do 76,8 kb/s), LonTalk (32 kb/s do 5Mb/s) o0 Mb/s), Master-Slave/Token-Passing realizowany poprzez RS-485 (do 76,8 kb/s), LonTalk (32 kb/s do 5Mb/s) oraz Point-to-Point realizowany poprzez RS-232 (do 56kb/s) i tunelowanie w sieci IP (UDP/IP). Poszczególne warstwy modelu OSI charakteryzujące system BACnet zostały przedstawione na rys. 6. W standardzie nie określono możliwości wykorzystania sieci oraz mediów komunikacyjnych innego typu oprócz wymienionych.
Dotyczy to szczególnie sieci radiowych – obecnie prowadzone są prace badawcze sprawdzające możliwość łączenia sieci BACnet i sieci bezprzewodowych – np. ZigBee (tzw. BACnet over ZigBee). W omawianej sieci każde urządzenie dołączone jest do tzw. segmentu fizycznegraz Point-to-Point realizowany poprzez RS-232 (do 56kb/s) i tunelowanie w sieci IP (UDP/IP). Poszczególne warstwy modelu OSI charakteryzujące system BACnet zostały przedstawione na rys. 6.
W standardzie nie określono możliwości wykorzystania sieci oraz mediów komunikacyjnych innego typu oprócz wymienionych. Dotyczy to szczególnie sieci radiowych – obecnie prowadzone są prace badawcze sprawdzające możliwość łączenia sieci BACnet i sieci bezprzewodowych – np. ZigBee (tzw. BACnet over ZigBee).
y czy własność jest opcjonalna, obecna i możliwa do odczytu czy obecna i możliwa do odczytu i zapisu. Nie ma wymagania, aby wszystkie obiekty określonego typu miały tę samą kombinację własności opcjonalnych. W standardzie BACnet zdefiniowany został i rozbudowywany zbiór obiektów, tak aby można było je zaimplementować w urządzeniach o różnych możliwościach. Przykładem są obiekty typu wejście analogowe, wyjście binarne, planer, kalendarz i ich własności, które służą do opisania stanu systemu lub do wysyłania komend.
Wśród obiektów charakteryzujących każde urządzenie musi znajdować się jeden obiekt typu urządzenie zawierający unikalne dane dotyczące danego urządzenia (numer modelu, nazwa producenta, wspierana wersja protokołu, wspierane typy obiektów, itp.). Dostęp do każdego z nich określony jest przez identyfikator obiektu (Object_Identifier), jednoznacznie określający każdy obiekt wewnątrz urządzenia. Kolejną istotną własnością jest nazwa obiektu (Object_Name), będąca łańcuchem znaków identyfikującym obiekt w postaci zrozumiałej dla operatora.
Przesyłanie danych
Sieć BACnet umożliwia przesyłanie danych, wśród których można wyszczególnić: binarne i analogowe sygnały wejściowe oraz wyjściowe współpracujących urządzeń i aplikacjach, informacje o planowaniu, informacje o obsługiwanych zdarzeniach i alarmach, pliki oraz informację dotyczące sterowania.
W standardzie zdefiniowane zostały podstawowe funkcje umożliwiające dostęp do urządzeń oraz informacji przesyłanych w sieci – są nimi opisane wcześniej usługi aplikacji. Pozwalają one także na dodatkowe czynności, jak np. obsługa alarmów lub zapewnienie bezpieczeństwa. Wśród nich wyróżnia się 6 kategorii, w tym usługi obsługujące alarmy i zdarzenia, usługi dostępu do obiektu, do pliku, usługi zdalnego zarządzania urządzeniem i inne.
CZĘŚĆ IV: W kierunku otwartości
Zaprezentowane w artykule rozwiązania charakteryzują się publicznie dostępnym, jawnym protokołem komunikacji, jak też są silnie wspierane ze strony rozwijających je organizacji i związanych z nimi producentów (patrz tab. 2). Pomimo że technologie te są stosunkowo nowe, wzrasta ich rola w automatyce budynkowej, gdzie dotychczas dominowały systemy zamknięte.
Ich rozwój podyktowany jest relatywnie niskimi kosztami wdrażania i zastosowania nowoczesnych technologii. Należy podkreślić, że istnieje możliwość integracji kilku przedstawionych rozwiązań, co znacznie zwiększa możliwości projektowanego systemu. W praktyce w zautomatyzowanym budynku stosownych jest kilka systemów, w tym te zamknięte, o niejawnym protokole, które zapewniają wyższe bezpieczeństwo komunikacji pomiędzy urządzeniami.
Coraz częściej systemy automatyki budynków są instalowane w domach mieszkalnych. Ich wykorzystanie jest podyktowane wymaganiami prawnymi dotyczącymi oszczędności energetycznej. Można przypuszczać, że z czasem nowe budynki mieszkalne będą standardowo wyposażone w odpowiednie media (kable, routery, bramy, repeatery) służące późniejszej instalacji systemu.

Na zakończenie należy wspomnieć o istotnym zagadnieniu, jakim jest rzeczywista implementacja wspomnianych technologii. Obecnie większość systemów jest wciąż instalowana bez ścisłych formalnych metod projektowania. W szczególności dotyczy to systemów otwartych.
Integratorzy zwykle polegają na nabytej wiedzy i doświadczeniu, dlatego ważna jest tutaj ścisła współpraca z firmami budowlanymi i architektami już na wczesnym etapie projektowania instalacji. Z tego powodu wciąż rozwijane są aplikacje i metody pozwalające na lepsze przewidywanie własności zaprojektowanego systemu oraz określenie jakości stosowanych w nim urządzeń.
W chwili obecnej, pomimo istnienia zaawansowanych narzędzi do projektowania systemów automatyki budynkowej, kompletna analiza i dokładne modelowanie zachowania systemu jest bardzo złożonym zagadnieniem.
Jakub Możaryn











