

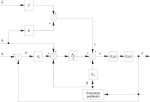
W układach z serwomechanizmami wydzielić można trzy formalne rodzaje regulacji – regulację położenia ze sprzężeniem od położenia, regulację prędkości ze sprzężeniem od prędkości oraz regulację momentu ze sprzężeniem prądowym. Schemat serwomechanizmu z wydzieleniem wymienionych trybów regulacji przedstawiony został na rys. 1. W dalszej części artykułu przedstawione zostaną występujące typowe układy regulacji prędkości i położenia, które wykorzystywane są w przypadku serwomechanizmów, w których osiągnięty ma być złożony i dokładny ruch serwonapędu wzdłuż określonej trajektorii. W tym celu można przyjąć, że projektant nie ma bezpośrednio wpływu na układ regulacji momentu, który składa się z regulatora momentu i przekształtnika. Układ ten będzie opisany transmitancją  , a serwonapęd transmitancją
, a serwonapęd transmitancją  .
.
Pomiar czy estymacja prędkości?
W układach regulacji z zadanym profilem prędkości wymagana jest znajomość rzeczywistej prędkości w pętli sprzężenia tachometrycznego. Ponieważ pomiar szybkości przy pomocy tachometru jest złożony i znacznie zwiększa koszt urządzenia, często stosuje się estymację rzeczywistej prędkości napędu  wykorzystując tzw. filtrację położenia.
wykorzystując tzw. filtrację położenia.
Do odtwarzania prędkości wykorzystywany jest pomiar położenia w kilku kolejnych chwilach czasowych (tzw. punktach) i zastosowanie numerycznych metod różniczkowania. Zaletą takiego rozwiązania jest fakt, że nie jest wymagana znajomość modelu matematycznego napędu, a co za tym idzie nie jest ono wrażliwe na zmieniające się warunki pracy układu. W praktyce przemysłowej najpopularniejszą metodą jest różniczkowanie bezpośrednie zwane metodą siecznych. Można także wykorzystać wielomian aproksymacyjny lub wielomian interpolacyjny. Dokładność metody różniczkowania numerycznego zależy przy tym od wyboru liczby punktów pomiaru położenia. Ich zwiększanie wpływa korzystnie na wygładzanie odtworzonego profilu prędkości, powoduje jednak powstawanie opóźnienia fazowego wynikającego z długości przedziału czasowego, w którym wykonywane są pomiary. Dodatkowo na pracę układu negatywnie wpływa kwantyzacja i próbkowanie mierzonego sygnału. Metoda jest nieodporna na zakłócenia występujące w zastosowaniach praktycznych, które choć nie są znaczące w stosunku do mierzonego sygnału, powodują powstawanie znacznych różnic pomiędzy rzeczywistymi, a odtwarzanymi przebiegami prędkości.
Analityczny dobór nastaw regulatora PIV W celu dostrojenia układu z regulatorem PIV wykorzystywane są dwa parametry: pasmo przenoszenia BW (bandwidth) i współczynnik tłumienia d serwomechanizmu. Do wstępnego doboru nastaw wymagane są estymowane wartości całkowitego momentu bezwładności napędu Nastawy układu regulacji PIV mogą być obliczone z wykorzystaniem zadanych przez projektanta wartości pasma przenoszenia i współczynnika tłumienia d oraz estymowanych wartości momentu bezwładności i tłumienia wiskotycznego napędu.
|
 oraz współczynnika tłumienia wiskotycznego
oraz współczynnika tłumienia wiskotycznego  silnika. Projektant układu regulacji może uzyskać te wartości korzystając z dodatkowego oprogramowania w układzie napędu i silnika. Pasmo przenoszenia przy ustalonym współczynniku tłumienia d wpływa na czas regulacji i ustalania się odpowiedzi układu na wymuszenie. Zmniejszanie współczynnika tłumienia powoduje zwiększenie przeregulowania i krótsze czasy regulacji dla ustalonego pasma przenoszenia.
silnika. Projektant układu regulacji może uzyskać te wartości korzystając z dodatkowego oprogramowania w układzie napędu i silnika. Pasmo przenoszenia przy ustalonym współczynniku tłumienia d wpływa na czas regulacji i ustalania się odpowiedzi układu na wymuszenie. Zmniejszanie współczynnika tłumienia powoduje zwiększenie przeregulowania i krótsze czasy regulacji dla ustalonego pasma przenoszenia.


Alternatywnym, choć znacznie mniej popularnym w praktyce przemysłowej rozwiązaniem, jest szacowanie prędkości z wykorzystaniem tzw. obserwatora prędkości. Pozwala to na znaczną eliminację występujących opóźnień oraz wpływu zakłóceń, ale wymaga znajomości modelu obiektu którego wyznaczenie nie zawsze jest proste. Dodatkowym ograniczeniem jest brak odporności na zmiany dynamiki sterowanego napędu, charakteru obciążenia oraz warunków pracy. Można jednak przypuszczać, że wraz ze wzrostem możliwości obliczeniowych sterowników wykorzystanie obserwatorów w przemysłowych układach regulacji będzie coraz bardziej popularne.
Sprzężenie prędkościowe z regulatorem PID


Trudność związana z przedstawionym układem polega zwykle na odpowiednim doborze nastaw regulatora. Każdy z parametrów wpływa bowiem w inny sposób na własności układu. Odpowiedni współczynnik  sprawia, że układ jest stabilny i pozwala on na zwiększanie pozostałych nastaw, jednak zbyt duże jego wartości mogą prowadzić do niestabilności układu i wystąpienia znacznych zakłóceń. Z kolei
sprawia, że układ jest stabilny i pozwala on na zwiększanie pozostałych nastaw, jednak zbyt duże jego wartości mogą prowadzić do niestabilności układu i wystąpienia znacznych zakłóceń. Z kolei  wpływa na sztywność układu, czyli na odporność na zewnętrzne zakłócenia. Ustawienie zbyt dużej wartości
wpływa na sztywność układu, czyli na odporność na zewnętrzne zakłócenia. Ustawienie zbyt dużej wartości  powoduje jednak przeregulowanie i niedokładne odtwarzanie profilu prędkości, szczególnie przy silnych nachyleniach zbocza.
powoduje jednak przeregulowanie i niedokładne odtwarzanie profilu prędkości, szczególnie przy silnych nachyleniach zbocza.  dostarcza układowi odpowiedniego tłumienia, nie pozwalając na duże przeregulowania. Zbytnie zwiększanie tej nastawy powoduje pojawianie się oscylacji o wysokiej częstotliwości. Podczas strojenia regulatora tego typu kluczowe są więc takie działania, które pozwolą zredukować negatywny wpływ poszczególnych nastaw.
dostarcza układowi odpowiedniego tłumienia, nie pozwalając na duże przeregulowania. Zbytnie zwiększanie tej nastawy powoduje pojawianie się oscylacji o wysokiej częstotliwości. Podczas strojenia regulatora tego typu kluczowe są więc takie działania, które pozwolą zredukować negatywny wpływ poszczególnych nastaw.
Pomocny układ PDFF

Aby zapobiec powyższym zjawiskom, zaproponowano schemat regulacji o nazwie PDFF (Pseudo Derivative Control with Feedforward Gain), który przedstawiony został na rys. 3. Układ składa się z dwóch elementów – pierwszym jest układ regulacji z tzw. sprzężeniem pseudo-różniczkującym PDF (Pseudo-Derivative Feedback) i charakteryzuje się on mniejszym przeregulowaniem w porównaniu z układem typu PI. Chcąc umożliwić wykorzystanie zalet tych dwóch układów regulacji wprowadzono sprzężenie do przodu od błędu prędkości skalowane przez parametr  . Błąd w jest w tym przypadku liczony jako:
. Błąd w jest w tym przypadku liczony jako:
Podczas strojenia układu dobiera się nastawę  mając na uwadze znajomość pracy układu. Jeśli ma on szybko odpowiadać na wartość zadaną, parametr ten powinien być duży. Przyjęcie wartości
mając na uwadze znajomość pracy układu. Jeśli ma on szybko odpowiadać na wartość zadaną, parametr ten powinien być duży. Przyjęcie wartości  =1 (100%), spowoduje, że otrzyma się regulator typu PI. Jeśli natomiast układ ma się charakteryzować większą odpornością na zakłócenia przy wolnych prędkościach (dużą sztywnością), wartość ta powinna być stosunkowo mała. Dla (Obrazek 43 x 22
=1 (100%), spowoduje, że otrzyma się regulator typu PI. Jeśli natomiast układ ma się charakteryzować większą odpornością na zakłócenia przy wolnych prędkościach (dużą sztywnością), wartość ta powinna być stosunkowo mała. Dla (Obrazek 43 x 22  =0 (100%) otrzyma się regulator PDF. W większości praktycznych zastosowań wartość
=0 (100%) otrzyma się regulator PDF. W większości praktycznych zastosowań wartość  jest przyjmowana jako około 0,65 (65%).
jest przyjmowana jako około 0,65 (65%).
Regulacja kaskadowa ze sprzężeniem od położenia i prędkości

 staje się sygnałem wejściowym bloku korekcji prędkości. Akcja całkująca o stałej
staje się sygnałem wejściowym bloku korekcji prędkości. Akcja całkująca o stałej  działa bezpośrednio na błąd prędkości. Ostatecznie wynik akcji całkującej jest sumowany z wynikiem działania akcji proporcjonalnej na sygnał prędkości
działa bezpośrednio na błąd prędkości. Ostatecznie wynik akcji całkującej jest sumowany z wynikiem działania akcji proporcjonalnej na sygnał prędkości  w pętli sprzężenia od prędkości regulatora PIV.
w pętli sprzężenia od prędkości regulatora PIV.
Wykorzystanie modelu obiektu w układzie regulacji PIV

Ponieważ zakłócenia  nie są znane, zaś parametry obiektu regulacji można jedynie oszacować, stosuje się następującą zależność na przybliżenie momentu napędowego:
nie są znane, zaś parametry obiektu regulacji można jedynie oszacować, stosuje się następującą zależność na przybliżenie momentu napędowego:
W większości przypadków zakłócenia momentu napędowego są na tyle niewielkie, że oszacowany moment napędowy jest zbliżony do wymaganego. Jeśli dostępne są sygnały zadane przyspieszenia i prędkości, estymowane wartości całkowitego momentu bezwładności  i współczynnika tłumienia wiskotycznego
i współczynnika tłumienia wiskotycznego  mogą być wykorzystane do wygenerowania w czasie rzeczywistym profilu estymowanego momentu napędowego
mogą być wykorzystane do wygenerowania w czasie rzeczywistym profilu estymowanego momentu napędowego  . Schemat układu regulacji PIV uzupełniony o sterowanie feedforward został pokazany na rys. 5. Wykorzystywane są tutaj sygnały prędkości zadanej
. Schemat układu regulacji PIV uzupełniony o sterowanie feedforward został pokazany na rys. 5. Wykorzystywane są tutaj sygnały prędkości zadanej  oraz przyspieszenia
oraz przyspieszenia  zsynchronizowane z położeniem
zsynchronizowane z położeniem  , które podawane są z generatora trajektorii, który jest zwykle sprzężony z regulatorem. Prawidłowe stosowanie wyznaczonego sterowania ze sprzężeniem do przodu wpływa w istotny sposób na redukcję czasu regulacji i przeregulowania oraz pozwala uzyskać błąd śledzenia bliski zeru.
, które podawane są z generatora trajektorii, który jest zwykle sprzężony z regulatorem. Prawidłowe stosowanie wyznaczonego sterowania ze sprzężeniem do przodu wpływa w istotny sposób na redukcję czasu regulacji i przeregulowania oraz pozwala uzyskać błąd śledzenia bliski zeru.
Należy jednak podkreślić, że wiele regulatorów nie ma zaimplementowanego generatora profilu przyspieszenia. Tak więc wybór tego typu regulacji stosowany jest w bardziej zaawansowanych układach.
 Rys. 6. Strojenie regulatora PIV Poniżej przedstawiono metodę iteracyjnego strojenia regulatora PIV, w której wykorzystuje się odpowiedź czasową serwomechanizmu na zadane wymuszenie o określonym profilu prędkości. Strojenie następuje w dwóch krokach. Na początku określa się nastawy pętli sprzężenia tachometrycznego, a następnie ustawia się wartości pętli sprzężenia od położenia. W kroku strojenia pętli sprzężenia tachometrycznego należy ustawić wszystkie wartości nastaw na 0. Następnie należy zwiększać wartość KPV i obserwować, czy uzyskany ruch ma profil zbliżony do zadanego. Proces ten należy powtarzać do momentu uzyskania niestabilnego ruchu, podczas którego pojawiają się silne oscylacje. Uzyskany profil zwykle charakteryzuje się silnymi szumami oraz pewnym widocznym opóźnieniem. Ponieważ w pętli sprzężenia tachometrycznego często znajduje się element estymujący prędkość, jego wykorzystanie będzie najczęściej wpływało na pojawiające się błędy. W następnych krokach strojenia należy zwiększać wartość KIV aż do momentu, gdy będzie widoczne przeregulowanie w profilu prędkości. Celem tego działania jest uzyskanie jak największej wartości KIV bez widocznego przeregulowania. Po określeniu wartości granicznej należy zmniejszyć ją o około 2/3. Podczas strojenia pętli sprzężenia od położenia należy skoncentrować się na ustaleniu profilu położenia i jego błędach. W kolejnych krokach należy zwiększać wartość KPP aż do chwili, gdy widoczne będzie przeregulowanie i silne oscylacje w profilu położenia. Celem jest tutaj uzyskanie jak największej wartości KPP bez widocznego przeregulowania. Po określeniu wartości granicznej należy również zmniejszyć ją o około 2/3. |
Uwaga na dodatnie sprzężenie zwrotne!
Zły dobór elementów i nastaw regulatora może spowodować, że w zaprojektowanym układzie wystąpi nie ujemne, a dodatnie sprzężenie zwrotne. Sytuacja taka może wynikać z błędnej pracy elementów w układzie i aby jej zapobiec należy sprawdzić, czy wszystkie elementy układu (przetwornik pomiarowy, regulator, przekształtnik i silnik) są połączone prawidłowo. Istotną własnością serwonapędu, którą należy uwzględnić podczas projektowania układu, jest również przesunięcie fazowe występujące w każdym z elementów w układzie regulacji.
W przypadku omawianych układów istnieje kilka ograniczeń, które znacząco wpływają na efektywność ich działania. Stosowane w serwomechanizmach wzmacniacze maja ograniczenia prądowe oraz skończone czasy odpowiedzi. Dla częstotliwości ruchu w zakresie bliskim 50Hz pętle prądowe mogą być pominięte, jednak jeśli istnieje potrzeba wykorzystania pasm przenoszenia obejmujących wyższe częstotliwości, pętle prądowe także powinny być brane pod uwagę. Ważnym czynnikiem w działaniu serwomechanizmu jest także rozdzielczość i dokładność urządzenia pomiarowego. Enkodery o niskiej rozdzielczości wpływają na słabe oszacowanie prędkości i prowadzą do ograniczeń cyklu lub do problemów z tętnieniem prędkości. Kolejnymi elementami, które należy brać pod uwagę, są sprzęgła łączące obciążenie z serwonapędem. One także wpływają na ograniczenia pasma przenoszenia.
Jeśli wciąż układ nie pracuje prawidłowo i na przykład występują niekorzystne oscylacje w niektórych częstotliwościach należy dokonać jego analizy pod względem występujących przesunięć fazowych w poszczególnych elementach. Warto tutaj znać charakterystyki częstotliwościowe elementów układu regulacji. Przykład takiej analizy podany jest w ramce.
 Rys. 7. Określanie przesunięcia fazowego w układzie regulacji Przyjmijmy, że wykorzystany został układ regulacji PI przedstawiony na rys. 6. Niestabilność w takim układzie zwykle objawia się w postaci oscylacji w pewnym zakresie częstotliwości. Niech sygnałem zadanym będzie sinusoida o częstotliwości 414Hz. Jest to dosyć wysoka częstotliwość, więc regulator PI wprowadzi w tym wypadku niewielkie przesunięcie fazowe, które będzie wynosić przykładowo 2°. Pętla sprzężenia prądowego we wzmacniaczu działa jak filtr dolnoprzepustowy, wprowadzając większe przesunięcie fazowe, które w tym przypadku będzie wynosić około 47°. Serwonapęd pewni z kolei rolę idealnego elementu różniczkującego, wprowadzając stałe przesunięcie fazowe 90°. W rzeczywistym układzie wartość ta będzie trochę mniejsza z uwagi na występujące tarcie. Ostatnim elementem w pętli sprzężenia jest przetwornik pomiarowy. Przyjmijmy, że przetwarza on sygnał analogowy na cyfrowy i działa jak filtr dolnoprzepustowy. Wprowadzone zostanie więc dodatkowe przesunięcie fazowe wynoszące około 41°. Sumując wszystkie wartości dla częstotliwości 414Hz uzyskuje się przesunięcie fazowe 180°. Oznacza to, że w układzie regulacji sygnał zmienia swój znak na odwrotny do zamierzonego i powstawać może niekorzystne dodatnie sprzężenie zwrotne. |
Podsumowanie
Zarówno algorytm PID, jak i algorytm PIV wykorzystywane są w układach z serwomechanizmami. Można zadać pytanie – który z nich należy stosować? Okazuje się, że w wielu rozwiązaniach wystarczy użycie układu z regulatorem PID. Spełnia on swoją funkcję najlepiej wtedy, gdy osiągi serwomechanizmu nie muszą być wysokie – szczególnie w przypadkach ruchu z punktu do punktu. W układach z regulatorem PID najczęściej wykorzystuje się do strojenia metodę Zieglera-Nicholsa. Niestety takie rozwiązanie nie zapewnia optymalnych nastaw i wymaga wymuszenia skokowego podczas strojenia. W tym przypadku przeregulowanie i czas regulacji są ze sobą silnie powiązane powodując utrudnione strojenie regulatora.
W przypadku gdy założenia projektu są bardziej wymagające i należy uwzględnić złożony ruch napędu, warto spróbować obydwu metod i wybrać tę, która daje wynik zbliżony do oczekiwanego. Dzieje się tak szczególnie dla złożonych systemów, w których mogą wystąpić znaczne zakłócenia i zmiany parametrów układu i obciążenia. Wtedy serwomechanizm z regulatorem PIV może okazać się rozwiązaniem korzystniejszym. Ponieważ stosowane jest w nim sprzężenie tachometryczne, jest on szczególnie przydatny tam, gdzie istotny jest profil prędkości.
Sterowanie z regulatorem PIV pozwala na wykorzystanie metody doboru nastaw, która uniezależnia w dużym stopniu przeregulowanie i czas regulacji, pozwalając na prostsze strojenie i pożądane charakterystyki tłumienia zakłóceń. Ostatecznie, aby zminimalizować błąd śledzenia położenia, stosowane jest sterowanie ze sprzężeniem do przodu jako uzupełnienie sterowania ze sprzężeniem zwrotnym. Wymaga ono jednak znajomości przybliżonych parametrów serwonapędu.
Jakub Możaryn












