
Systemy wizyjne składają się zazwyczaj z kamery i analizatora obrazów, którego rolę pełnić może komputer z odpowiednim oprogramowaniem. Podzespoły te muszą być dobrane odpowiednio do potrzeb danej aplikacji, przy czym podstawowym zagadnieniem jest tutaj użycie z czujnika obrazu, który zapewniał będzie odpowiednią szybkość działania i rozdzielczość systemu obrazowania.
Architektury CCD

Wszystkie czujniki typu CCD (Charge-Coupled Device) składają się z pewnej liczby komórek światłoczułych (pikseli) przetwarzających fotony na ładunki elektryczne oraz z układów odczytujących, które w sposób zorganizowany przekazują ładunek każdego piksela do wzmacniacza wyjściowego i dalej na zewnątrz.
W tym zakresie opracowano szereg rozwiązań cechujących się różnymi parametrami, przez co niektóre architektury czujników obrazu są lepiej przystosowane do systemów wizyjnych, a inne do aplikacji takich jak astronomia czy fotografia cyfrowa. Najpopularniejsze czujniki używane w systemach wizyjnych wykonywane mogą być w architekturze liniowej, z transferem międzyliniowym, jako elementy pełnoklatkowe i z transferem klatek.
Przetworniki liniowe CCD
Liniowy czujnik obrazu zawiera jedną lub więcej liniowych matryc pikseli. Każda matryca jest sprzężona z co najmniej jednym układem odczytu i wzmacniaczem. Liniowe czujniki obrazu nadają się do aplikacji wizyjnych, które obrazują produkty wykonywane w sposób ciągły, jak np. płyty komputerowe na taśmie montażowej, a także inne płaskie wyroby – czasopisma, tkaniny drukowane lub pieniądze (rys. 1).
Czujniki liniowe charakteryzują się prostą architekturą i nadają się do obrazowania szybko poruszających się obiektów. W przypadku obrazowania przedmiotów trójwymiarowych powinny być jednak stosowane detektory powierzchniowe.
Czujniki pełnoklatkowe
W matrycach pełnoklatkowych funkcja akwizycji obrazu połączona jest z jego odczytem (rys. 2). Nie mają one układów pozwalających na przechowywanie ładunku, przez co konieczne jest zastosowanie migawki zewnętrznej albo oświetlenie strobującego do blokowania docierającego światła. Tego typu czujniki były dawniej, w połowie lat 80. zeszłego wieku jedynymi stosowanymi w zaawansowanych aplikacjach wizyjnych, gdyż charakteryzowały się dostateczną rozdzielczością.
Czujniki pełnoklatkowe cechują się najprostszą architekturą spośród czujników powierzchniowych, a także najlepszą rozdzielczość i największą gęstością rozmieszczenia pikseli światłoczułych (czyli największym współczynnikiem wypełnienia). Czujniki te mają także największą pojemność full-well, co określa maksymalny ładunek jaki piksel może przyjąć bez nasycenia się. Charakteryzują je także niewielkie szumy i duży zakres dynamiczny, niemniej wymagają stosowania migawki.
CCD z transferem klatek

Czujnik obrazu z transferem klatek jest podobny do czujnika pełnoklatkowego. Zawiera on jednak drugą matrycę powierzchniową, która pełni rolę bufora przechowującego obraz (rys. 3). Architektura ta nie wymaga stosowania migawki mechanicznej i oferuje możliwość odczytu większej liczby klatek na sekundę niż czujniki pełnoklatkowe, ponieważ transfer jednego obrazu jest możliwy podczas akwizycji drugiego.
Właściwości omawianego czujnika są jednak gorsze, ponieważ odbiór obrazu odbywa się nadal w czasie transferu do matrycy przechowującej, co powoduje jego degradację. Do realizacji tej architektury potrzebne jest również dwukrotnie więcej materiału podłożowego, a CCD z transferem klatek mają gorszą rozdzielczość i są droższe niż te pełnoklatkowe.
Niemniej omawiane czujniki charakteryzują się większym współczynnikiem wypełnienia, zazwyczaj niewielkimi szumami i dużym zakresem dynamicznym. Ponieważ mają one migawkę elektroniczną, pozwala to na uzyskanie dużych częstotliwości odczytu. Ich główną wadą jest większe rozmazywanie obrazu przy krótkich czasach ekspozycji i wyższe koszty produkcji.
Przetworniki z transferem międzyliniowym

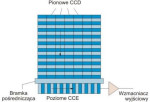
W czujnikach obrazu z transferem międzyliniowym funkcje akwizycji obrazu i jego dalszego odczytu są także rozdzielone. Każdy piksel jest obramowany osłoniętym przed światłem pionowym CCD (VCCD), który przekazuje ładunek (rys. 4). Pozwala to czujnikowi odbierać obraz przekazując w tym samym czasie z czujnika obraz poprzedni i realizując w ten sposób wbudowaną migawkę elektroniczną.
Czujniki z transferem międzyliniowym zostały opracowane później niż pełnoklatkowe i z transferem klatek. Gdy technologia międzyliniowa stała się dojrzała, zaistniała również możliwość produkowania układów o lepszej rozdzielczości i większej częstotliwości odczytu.
Obecnie czujniki z transferem międzyliniowym są najczęściej używanymi elementami CCD do obrazowania obiektów trójwymiarowych np. w aplikacjach, takich jak testowanie napełnienia butelek czy sprawdzanie stanu opakowań. Oferują one rozdzielczości od VGA do megapikselowych oraz dużą pojemność full-well. Mają one także małe szumy, duży zakres dynamiki, a krótkie czasy ekspozycji pozwalają na uzyskanie ostrych obrazów.
Podsumowanie
Wskazać można na kilka trendów, które związane są z potrzebami użytkowników systemów wizyjnych i kształtują rynek omawianych czujników. Od tych ostatnich wymaga się obecnie coraz większych częstotliwości odczytu, które są konieczne w przypadku szybko poruszających się obiektów, większej wydajności kwantowej do uzyskiwania lepszych obrazów przy słabszym oświetleniu i krótszym czasie ekspozycji oraz większego zakresu dynamiki, aby szczegóły były dobrze widoczne zarówno w ciemniejszych, jak i jaśniejszych partiach obrazu.
Rodzaj migawki, możliwość stopniowego odczytu obrazów i duża czułość to też istotne podstawowe parametry, które decydują o przydatności czujnika w danej aplikacji. Dlatego ważne jest zrozumienie idei różnych architektur czujników, ich odmian i właściwości, aby nabrać pewności przy wyborze optymalnego czujnika do danej aplikacji. Przedstawione w artykule informacje są dobrym punktem wyjścia do tego wyboru tak, aby móc optymalnie wykorzystać zalety systemu wizyjnego.
Krzysztof Pochwalski











