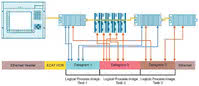
Rys. 1. Dane w EtherCAT są przesyłane w datagramach, które można logicznie przypisać do różnych zadań
Urządzenia wyposażone w interfejsy sieciowe EtherCAT, pomimo wykorzystania standardowego medium komunikacyjnego w postaci ekranowanej skrętki ethernetowej, są znacznie lepiej dostosowane do pracy w aplikacjach przemysłowych niż urządzenia wyposażone w standardowy interfejs Ethernet.
Wynika to przede wszystkim z rezygnacji z transmisji pakietowej i wynikającej z niej konieczności odtwarzania pofragmentowanych danych - co jest zadaniem czasochłonnym - i zastąpienie pakietów mechanizmem opartym na telegramach składających się z datagramów przypisanych do zadań logicznych, jak to pokazano na rys. 1. W każdym zadaniu logicznym można adresować przestrzenie do 4GB, co pozwala na skuteczną integrację w systemie bardzo dużej liczby linii I/O przy zachowaniu krótkiego czasu ich obsługi.
Zaletą przyjętego sposobu adresowania urządzeń jest rozdzielenie ich fizycznej lokalizacji od pogrupowania logicznego, co zapewnia dużą elastyczność konfiguracji i monitorowania systemu oraz zarządzania jego pracą. W systemie EtherCAT zrezygnowano z mechanizmu obsługi wielodostępu zgodnego z protokołem CSMA/CD, który jest jedną z podstawowych przeszkód uniemożliwiających zastosowania klasycznego Ethernetu w aplikacjach wymagających komunikacji w czasie rzeczywistym.
Obsługiwane są natomiast połączenia typu broadcast, multicast oraz bezpośrednia komunikacja pomiędzy urządzeniami slave. Na rysunku 2 pokazano porównanie faktycznego wykorzystania przepustowości magistrali komunikacyjnej dla różnych protokołów (dwa wykresy pierwsze od lewej dotyczą Ethernetu). Istotnym wymaganiem stawianym sieciom przemysłowym jest zapewnienie bezpieczeństwa funkcjonalnego działania urządzeń zgodnie z międzynarodową normą IEC 61508.
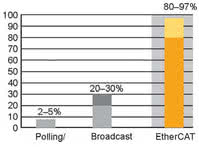
Rys. 2. Współczynnik wykorzystania kanału transmisyjnego w Ethernecie (dwa pierwsze wykresy od lewej strony) i EtherCAT
Protokół EtherCAT wyposażono w odpowiednie mechanizmy ulokowane w warstwie aplikacji (Safety Integrated Level 3), bez konieczności modyfikowania niższych warstw interfejsu, w tym warstwy sprzętowej, co dodatkowo upraszcza stosowanie w przemyśle tanich rozwiązań dostępnych na rynku PC. Dotyczy to także routerów oraz komputerów spełniających funkcję bramek, co zdecydowanie obniża koszty implementacji bezpiecznych systemów sterowania i regulacji.
Wykorzystanie w systemach zgodnych z EtherCAT zmodyfikowanego protokołu stosowanego w sieciach ethernetowych nie wpłynęło na elastyczność ich konfiguracji sieciowych: dopuszczalne są ich dowolne topologie, można także łączyć w jednym systemie sieciowym segmenty o różnych topologiach (rys. 3).
Rozwiązania zastosowane w protokole EtherCAT pozwalają m.in. obsłużyć 1000 linii I/O ulokowanych w rozproszonych modułach I/O w czasie nieprzekraczającym 30μs, a w pojedynczej ramce ethernetowej pozwalają przesłać do 1486 bajtów danych (co zabiera ok. 300 μs), co w przybliżeniu odpowiada 12 000 cyfrowym liniom I/O. Efektownie wypada także możliwość obsługi kanałów analogowych: maksymalna częstotliwość przesyłania lub odbierania 16-bitowych próbek wynosi aż 20kHz przy zapewnieniu jednoczesnej obsługi do 200 wejść lub wyjść analogowych.
WALKA Z CZASEM
Kolejnym nowatorskim rozwiązaniem wprowadzonym w protokole EtherCAT jest dystrybucja wzorcowego sygnału zegarowego przez urządzenia master dla urządzeń slave (zgodnie z protokołem IEEE1588), dzięki któremu jest możliwa m.in. synchronizacja urządzeń z dokładnością dochodzącą do 1μs. Przykładem takich urządzeń są m.in. serwomechanizmy stosowane do pozycjonowania elementów maszyn lub linii produkcyjnych lub urządzenia do akwizycji danych procesowych, w których jednoczesność pobierania próbek wyników ma wpływ na jakość sterowania przebiegiem procesu.
Protokół EtherCAT udostępnia także nowe typy przesyłanych danych (jak np. timestamp), które pozwoliły uzyskać rozdzielczość pomiaru czasu wynoszącą aż 10ns, co jest wykorzystywane do minimalizacji wpływu jitteru sygnału zegarowego na działanie sterowanych napędów, serwomechanizmów, siłowników, itp. Innym zastosowaniem sygnału zegarowego o dużej rozdzielczości jest możliwość zdalnego pomiaru czasu wykonywania lokalnych zadań.
MODYFIKACJE NA GORĄCO
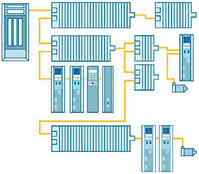
Rys. 3. Protokół EtherCAT dopuszcza dowolne topologie łączenia urządzeń sieciowych
Typowym wymogiem stawianym przemysłowym systemom sterowania i regulacji jest możliwość ich sprzętowego i logicznego rekonfigurowania w czasie pracy systemu, przy jednoczesnym zminimalizowaniu wpływu rekonfiguracji fragmentu systemu na jego pozostałe elementy. W systemach wykorzystujących protokół EtherCAT przewidziano możliwość bezpiecznego dołączania i odłączania modułów wejściowo-wyjściowych podczas pracy, bez ryzyka zaburzenia ich prawidłowego funkcjonowania.
Dynamiczna rekonfiguracja systemu sieciowego, z możliwością generowania alarmów w przypadku odłączenia wyspecyfikowanych przez użytkownika segmentów sieci lub urządzeń, jest standardową funkcjonalnością urządzeń master.
NIE TYLKO DO STEROWANIA
W protokole EhterCAT przewidziano także możliwość przesyłania dowolnych danych pomiędzy urządzeniami dołączonymi do sieci, do czego służy zaimplementowana w nim obsługa datagramów UDP/IP. Rozwiązanie to zapewnia m.in. elastyczną komunikację pomiędzy urządzeniami wyposażonymi w interfejs Ethernet i urządzeniami EtherCAT, a także możliwość wymiany danych pomiędzy urządzeniami ulokowanymi w segmentach sieci rozdzielonych za pomocą routerów.
W takich przypadkach realna prędkość wymiany danych pomiędzy urządzeniami EtherCAT zależy przede wszystkim od prędkości działania routerów, z czym należy się liczyć podczas projektowania systemu sieciowego.
PODSUMOWANIE
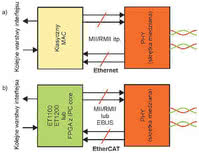
Rys. 4. Firma Beckhoff jest producentem układów MAC obsługujących protokół EtherCAT, które można stosować w standardowych urządzeniach wyposażonych w interfejs sieciowy zamiast MAC
Możliwości oferowane przez EtherCAT pozwalają w pełni wykorzystać moc obliczeniową współczesnych sterowników PLC przy jednoczesnym spełnieniu charakterystycznych dla nowoczesnych aplikacji przemysłowych wyrafinowanych wymagań czasowych i wysokiej pewności wymiany danych.
Jednocześnie modyfikacje wprowadzone w protokole EtherCAT nie naruszają standardowej struktury ramek ethernetowych, dzięki czemu parametry sterujące przepływem danych są lokowane w standardowych ramkach. Pozwala to - w przypadkach tego wymagających - integrować w jednym systemie sieciowym urządzenia wyposażone w interfejsy EtherCAT i Ethernet.
Na koniec równie ważna informacja: EtherCAT jest systemem otwartym, pozwalającym nie tylko współpracować ze standardowymi urządzeniami sieciowymi, ale także - dzięki zastosowaniu odpowiednich interfejsów - może być integrowany z urządzeniami obsługującymi protokół sieciowy Fieldbus, także wykorzystujący warstwę fizyczną klasycznego Ethernetu.
Beckhoff Automation
www.beckhoff.pl











