
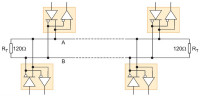
Rys. 1. Magistrala RS-485
Standard RS-485 powstał w latach 80. zeszłego wieku jako specyfikacja utworzona prze Electronics Industries Association (EIA) i szybko znalazł zastosowanie w aplikacjach typowo przemysłowych, medycznych oraz użytkowych. Podstawową topologią w standardzie RS-485 jest magistrala z transmisją w trybie półdupleksowym, gdzie nadawanie i odbiór danych realizowane są naprzemiennie.
Implementacja interfejsu wymaga protokołu sterującego wszystkimi węzłami za pomocą sygnałów kontrolnych, które pozwalają określić stan urządzenia i jego gotowość do nadawania lub odbierania informacji. Jest to konieczne, aby można było uniknąć sytuacji, w której więcej niż jedno urządzenie będzie żądało w danym czasie dostępu do sieci. W przeciwnym wypadku kilka urządzeń może jednocześnie rywalizować o możliwość transmisji.
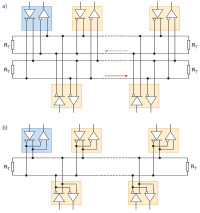
Rys. 2. Transmisja w RS-485: a) full-dupleks b) half-dupleks
Implementacja trybu full-dupleks wymaga oddzielnych magistrali do transmisji i odbioru (rys. 2). Zgodnie ze standardem nadajnik RS-485 powinien mieć wyjście różnicowe o poziomie napięcia minimum 1,5V, podczas gdy odbiornik powinien odbierać sygnały różnicowe o wartości przynajmniej 200mV.
Wartości te pozwalają zrealizować niezawodną transmisję nawet w przypadku znacznych strat sygnału w poszczególnych elementach toru transmisyjnego. Zaletą RS-485 jest transmisja różnicowa realizowana za pomocą skrętki dwuprzewodowej, ponieważ w takim przypadku zewnętrzne zaburzenia jednakowo oddziałują na obie linie sygnałowe. Związany z tym sygnał wspólny jest eliminowany na wejściu różnicowym odbiornika.
Okablowanie w zastosowaniach przemysłowych RS-485
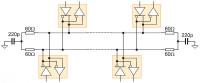
W zastosowaniach przemysłowych RS-485 wykorzystuje się kable o impedancji charakterystycznej 120Ω i przekroju 22AWG (około 0,6mm). Wymagane jest tutaj użycie rezystorów dopasowujących o wartości równej impedancji charakterystycznej przewodu. Ponadto w aplikacjach przeznaczonych do pracy w środowisku przemysłowym często używane są dodatkowe elementy w celu tłumienia sygnałów zakłócających.
Rys. 3. Poziomy sygnałów wymagane w standardzie RS-485
Ważne jest zapewnienie jak najbardziej zbliżonych wartości rezystancji zastosowanych rezystorów w celu uzyskania jednakowej częstotliwości odcięcia obu filtrów. Niedokładne sparowanie sprawia, że częstotliwości te różnią się i wówczas niepożądany sygnał wspólny jest traktowany jak różnicowy. Zmniejsza to odporność układu transmisyjnego na zaburzenia.
Istotne jest również stosowanie jak najkrótszych przewodów łączących urządzenia w sieci z magistralą. Istnieje związek między czasem narastania sygnału transmisyjnego i długością przyłączy. Na przykład przy szybkości transmisji 1000kb/s i czasie narastania 100ns maksymalna długość połączenia urządzenia z magistrala nie powinna przekraczać 2m, podczas gdy przy czasie narastania rzędu 500ns i transmisji 200kb/s możliwa długość przewodów łączących wzrasta do około 12m.
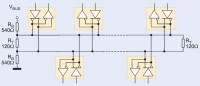
Dodatkowy obwód typu failsafe Bazując na rysunku, można przedstawić sposób doboru rezystorów w dzielniku. Zakładając następujące dane: źródło napięcia o wartości 4,75V (5V-5%), impedancja charakterystyczna przewodów magistrali: 120Ω oraz szum na poziomie 50mV z ilorazu (4,75·60)/0,25, można wyznaczyć wartość całkowitej rezystancji, która wyniesie 1140Ω. Jest to suma rezystancji równoległego połączenia dwóch rezystorów RT=120Ω i dwóch rezystorów RB. Stąd iloraz (1140-60)/2 = 540Ω jest pokazany na rysunku wartością pojedynczego rezystora RB. |
Tryb awaryjny w komunikacji RS-485

Rys. 4. Przykład parametrów przewodu transmisyjnego w RS-485
Tryb failsafe oznacza zdolność odbiornika do określenia stanu wyjściowego w przypadku braku sygnału na wejściu. Są trzy zasadnicze przyczyny, dla których wystąpić może brak sygnału. Pierwszą jest przerwanie przewodu transmisyjnego lub odłączenie urządzenia. Drugim przypadkiem jest zwarcie spowodowane uszkodzeniem izolacji różnicowej pary przewodów.
Trzecią z możliwych przyczyn jest jednoczesny brak aktywności wszystkich węzłów sieci. Wszystkie te sytuacje w standardowych urządzeniach wywołałyby ustalenie przypadkowego stanu wyjścia. Najnowocześniejsze rozwiązania zawierają układy, które w przypadku rozwarcia, zwarcia i braku aktywności sieci zapewniają na wyjściu odbiornika określony poziom sygnału.
Jednak ze względu na charakterystyczne dla tych rozwiązań ograniczenia dopuszczalnego marginesu zakłóceń do 10mV, konieczne staje się stosowanie dodatkowych obwodów awaryjnych (patrz ramka).
Obciążenie jednostkowe magistrali RS-485
Rys. 5. Tłumienie zaburzeń w przemysłowych rozwiązaniach RS-485
Praktyczne możliwości sterowników w wielopunktowej magistrali RS-485 powodują konieczność ograniczenia obciążenia magistrali. To z kolei determinuje dopuszczalne rezystancje wejściowe poszczególnych węzłów sieci i w rezultacie decyduje o maksymalnej liczbie przyłączonych urządzeń. Specyfikacja RS-485 nie określa jednak tej liczby, a jedynie definiuje obciążenie magistrali w stanie ustalonym.
W tym przypadku wykorzystuje się tzw. jednostki obciążenia jednostkowego (UL - Unit Load), które odpowiadają rezystancji obciążenia o wartości około 12kΩ.  Praca silników we współczesnych zakładach przemysłowych jest zazwyczaj kontrolowana cyfrowo. W sterownikach używanych w przemiennikach częstotliwości i innych urządzeniach napędowych do regulacji obrotów silnika wykorzystuje się układ mikroprocesorowy, którego typowe rozwiązanie przedstawiono schematycznie na rysunku.
Praca silników we współczesnych zakładach przemysłowych jest zazwyczaj kontrolowana cyfrowo. W sterownikach używanych w przemiennikach częstotliwości i innych urządzeniach napędowych do regulacji obrotów silnika wykorzystuje się układ mikroprocesorowy, którego typowe rozwiązanie przedstawiono schematycznie na rysunku.
Jego podstawowe elementy to procesor, enkoder dostarczający informację o aktualnym położeniu, prędkości i kierunku obrotów silnika oraz końcówka mocy zasilająca silnik. Przykładem układu, który można zastosować w takiej aplikacji, jest MAX3097E firmy Maxim. Jest to trzykanałowy odbiornik RS-485 zaprojektowany do komunikacji z enkoderami.
|
Układ regulacji obrotów silnika |

Aplikacja z zastosowaniem MAX3097E |
Jego zasadnicza cecha to rozszerzony zakres napięć wspólnych (od -10 do 13,2V), zabezpieczenie przed ESD, możliwość detekcji niepożądanych sytuacji, takich jak m.in. zbyt niski sygnał różnicowy na wejściu odbiornika oraz przekroczenie dopuszczalnego zakresu napięć wspólnych. Przykład aplikacji z zastosowaniem MAX3097E przedstawiono na rysunku. Oprócz odbiornika RS-485 w skład systemu regulacji obrotów silnika wchodzi procesor DSP oraz przetwornik C/A - np. typu MAX547.
Szybkość transmisji i długość magistrali w standardzie RS-485
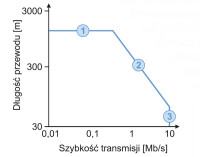
Rys. 6. Dopuszczalna długość przewodu przy określonej szybkości transmisji
Dopuszczalna długość magistrali jest determinowana przez straty sygnału w linii transmisyjnej oraz rozsynchronizowanie przy danej szybkości transmisji. Niezawodność transmisji gwałtownie spada przy rozsynchronizowaniu bitów danych powyżej 10% czasu trwania bitu. Na rysunku 6. przedstawiono wykres zależności długości przewodu od prędkości transmisji w standardzie komunikacyjnym RS-485 przy rozsynchronizowaniu 10%.
Pierwszy fragment wykresu odpowiada zakresowi małej szybkości transmisji, w którym długość linii transmisyjnej jest przede wszystkim ograniczona przez straty sygnału związane z rezystancyjnym charakterem linii transmisyjnej. Wraz ze wzrostem częstotliwości sygnału znaczącą rolę zaczyna odgrywać reaktancyjny charakter linii, co sprawia, że konieczne staje się stosowanie krótszych przewodów.
W trzecim fragmencie wykresu straty sygnału w przewodzie można uznać za pomijalne i jedynie czas narastania sygnału determinuje maksymalną szybkość transmisji. Największa rekomendowana w standardzie prędkość transmisji to 10Mb/s. Obecnie jednak szybkie interfejsy pracują z szybkością rzędu 40Mb/s.
Izolacja w magistrali RS-485

Rys. 7. Metody redukcji różnicy potencjałów mas w rozległych sieciach
W przypadku odległych punktów nadawczych i odbiorczych mogą występować duże różnice potencjałów mas, które jako sygnał wspólny pojawiają się na wyjściu nadajnika. W przypadku, gdy wartości te są bardzo duże i przekraczają zakres napięć wejściowych odbiornika, może nawet dojść do jego uszkodzenia.
W związku z tym stosowanie rozwiązania przedstawionego na rysunku 7a, gdzie odniesieniem jest lokalny system uziemiania, nie jest zalecane. Redukcja różnicy potencjałów mas poprzez ich bezpośrednie połączenie jest przedstawiona na rysunku 7b. Jednak to także nie jest polecane rozwiązanie, ponieważ sprzyja powstawaniu pętli prądowej.

Rys. 8. Wykorzystanie izolacji galwanicznej w magistrali RS-485
W standardzie RS-485 rekomendowana jest trzecia metoda z rysunku 7c. W jej przypadku wykorzystuje się separację masy urządzenia od lokalnego systemu uziemienia przy użyciu dodatkowych rezystorów. Pomimo że ten sposób zmniejsza pętlę prądową, to istnienie pętli uziemienia sprawia, że linie sygnałowe są narażone na wpływ zaburzeń.
Najlepszym dotychczas znanym rozwiązaniem w przypadku rozległych sieci jest zastosowanie izolacji galwanicznej. Wówczas linie sygnałowe poszczególnych węzłów magistrali są izolowane od lokalnych źródeł sygnału i zasilania. Jednym z możliwych rozwiązań jest zastosowanie izolacji zasilania za pomocą przetwornicy DC/DC oraz izolacji sygnału za pomocą izolatora cyfrowego z izolacją pojemnościową.
Zapobiega to przepływowi prądu pomiędzy oddalonymi punktami masy, co pozwala uniknąć powstawania pętli prądowych. Sytuacja taka została zilustrowana na rysunku 8, gdzie przedstawiono przykładową magistralę w standardzie RS-485. Poza pierwszym węzłem wszystkie pozostałe układy nadawczo-odbiorcze przyłączone są do magistrali za pomocą izolacji galwanicznej. Węzeł, który nie jest izolowany, stanowi punkt odniesienia dla całej magistrali.
RS-485 w sterowaniu rozległym systemem pomp
|
 Ze względu na dużą moc niezbędną do przeprowadzenia elektrolizy rudy aluminium pewna fabryka w Chinach zaopatrzyła się we własny
Ze względu na dużą moc niezbędną do przeprowadzenia elektrolizy rudy aluminium pewna fabryka w Chinach zaopatrzyła się we własny 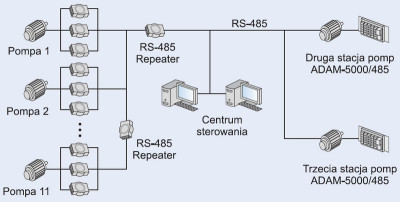

Fot. 1. Repeater RS-422/485 firmy Advantech; charakterystyka: szybkość transmisji danych od 1200b/s do 115,2kb/s, złącze interfejsów RS-422/485 i zasilania: terminal zaciskowy śrubowy, sygnały w RS-485: Data+, Data, sygnały w RS-422: Rx+, Rx-, Tx+, Tx-, optoizolacja: 3kV (tylko w modelu ADAM-4510S), zasilanie: 10-30VDC, pobór mocy: 1,4W
Ciśnienie, prędkość przepływu i poziom wody w poszczególnych zbiornikach są stale monitorowane. Na tej podstawie pompy i zawory we wszystkich stacjach sterowane są z głównego centrum kontrolnego mieszczącego się w fabryce. Do realizacji systemu wykorzystano moduły pomiarowe serii ADAM-4000 i ADAM-5000 z interfejsem RS-485 firmy Advantech.
W drugiej i trzeciej stacji pomp zainstalowano następujące urządzenia: ADAM-5051 - moduł 16 wejść cyfrowych monitorujących poziom wody oraz stan pomp, ADAM-5060 - moduł 6 wyjść przekaźnikowych oraz dwa ADAM-5017 - moduły 8 wejść analogowych monitorujące prąd, napięcie oraz ciśnienie przepływu.
W pierwszej stacji pomp do gromadzenia danych oraz realizacji funkcji sterujących wykorzystano z kolei głównie moduły serii ADAM-4000. W stacji zainstalowano: ADAM-4052 - moduł 8 optoizolowanych wejść cyfrowych, ADAM-4017 - moduł 8 wejść analogowych oraz ADAM-4060 - moduł 4 wyjść przekaźnikowych sterujących pompami. Ponadto, aby poprawić jakoś transmisji sygnału, użyto dwóch repeaterów ADAM-4510.
Źródła popularności standardu RS-485
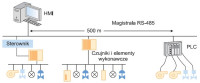
Rys. 9. Przykład zastosowania magistrali RS-485
RS-485 stał się w przemyśle popularnym standardem z kilku powodów. Zapewnia on możliwość transmisji charakteryzującej się dużą odpornością na zaburzenia, możliwością występowania napięć wspólnych w szerokim zakresie (od -7V do 12V) oraz dużą szybkością transmisji nawet przy znacznych długościach magistrali.
Ta ostatnia dodatkowo zwiększana może być przy użyciu specjalnych obwodów korekcyjnych w odbiorniku. Cechy te są szczególnie użyteczne w rozległych sieciach w przemyśle, gdzie duża odległość dzieląca urządzenia staje się problemem m.in. ze względu na występujące zaburzenia elektromagnetyczne, które utrudniają poprawną transmisję sygnałów.
Dzięki temu RS-485 może być z powodzeniem stosowany w różnych aplikacjach, zarówno w systemach sterowania w zakładach przemysłowych (rys. 9), jak i np. w złożonych rozwiązaniach HVAC w automatyce budynkowej.
Monika Jaworowska
źródło zdjęcia tytułowego: B&R









