
- Jak doszło do powstania platformy robotycznej?

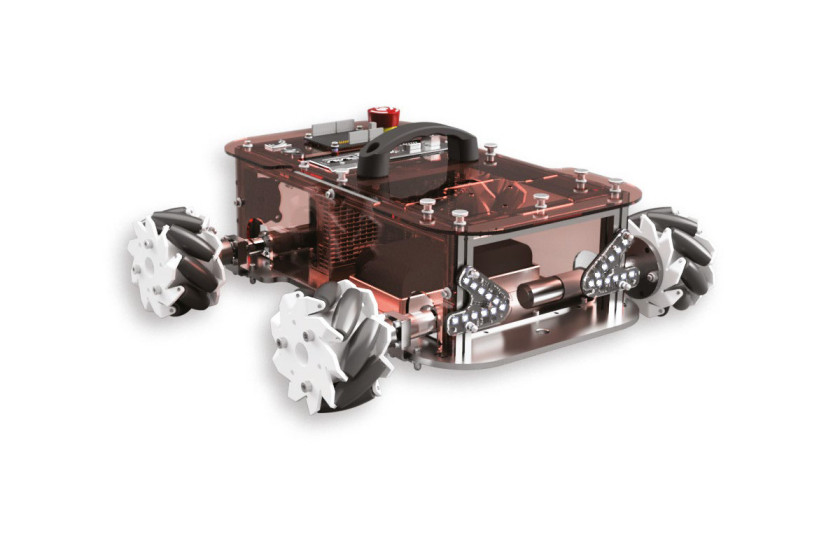
Markus Fenn: Sam robot nazywa się Eduard, ma wymiary 40×40×15 cm i waży niecałe 8 kg. To rezultat zapytania, jakie firma EduArt Robotik GmbH wystosowała do prof. Stefana Maya – potrzebowała platformy umożliwiającej kształcenie i szkolenie pracowników w zakresie mobilnej robotyki. Dlatego oprócz samej platformy robotycznej firma oferuje materiały szkoleniowe i usługi umożliwiające wykonywanie testów i optymalizację.
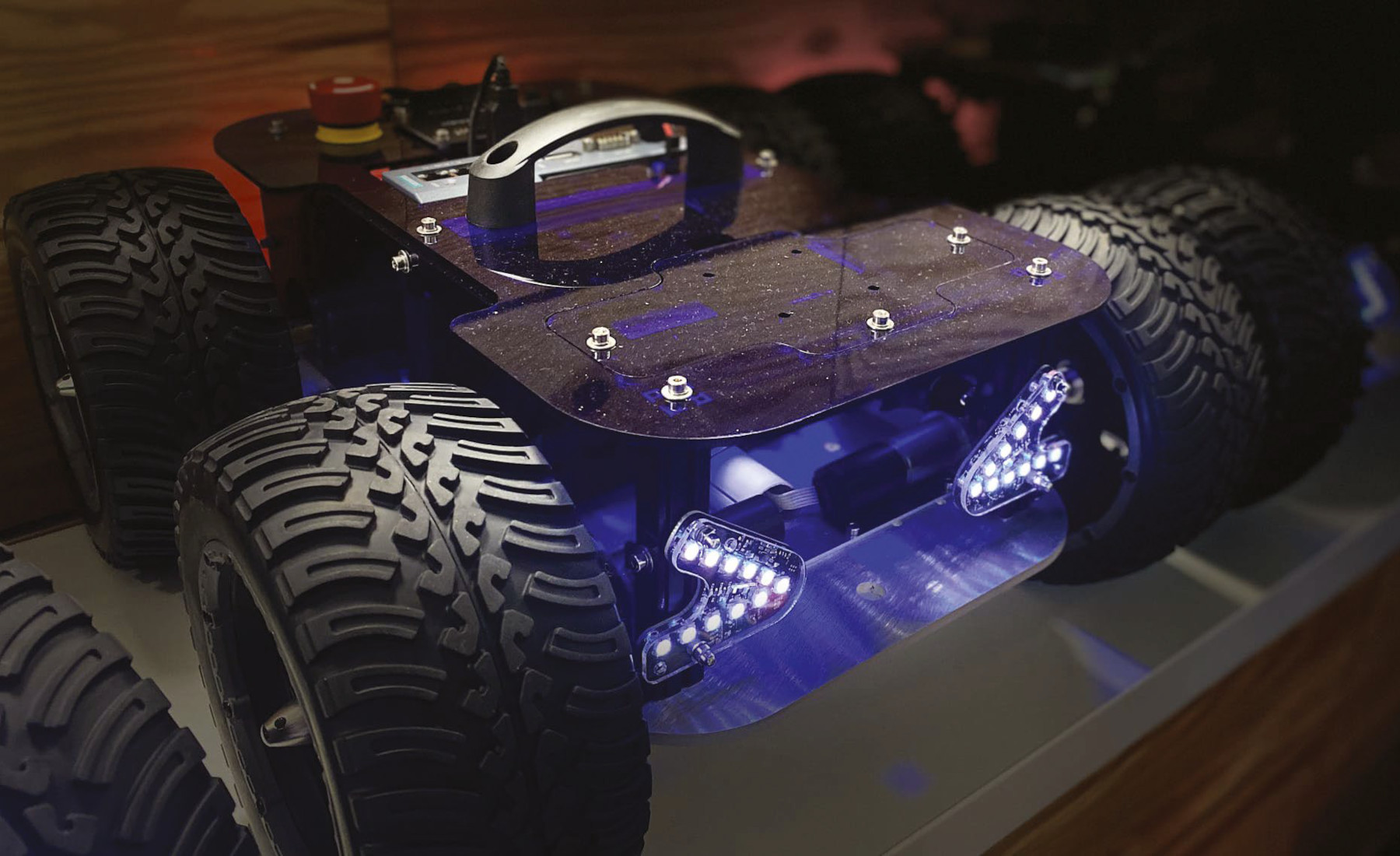
Platforma może być wyposażona zarówno w proste koła gumowe, jak i koła Mecanum. Dzięki nim robot potrafiobrócić się w miejscu oraz jechać w bok lub po skosie. To umożliwia dokładne pozycjonowanie i nawigację w bardzo ciasnych miejscach. Opony gumowe wykorzystuje się głównie podczas testów w obszarach zewnętrznych lub w robotyce ratunkowej, ale tylko w scenariuszach symulacyjnych. Wysokiej jakości silniki FAULHABER doskonale sprawdzają się w obu zastosowaniach.
- Co sprawia, że Pana platforma robotyczna jest wyjątkowa?
Wyposażono ją w otwarte interfejsy, rozwiązanie ze zintegrowanymi czujnikami i urządzeniami do pomiaru odległości i pomiarów inercyjnych oraz zintegrowany system zarządzania akumulatorami (BMS). Podstawowa wersja sprzętu może zostać rozbudowana zgodnie z życzeniem klienta zarówno przez nas, jak i przez niego samego. Dzięki temu może on np. wybrać przełożenie napędu – 72:1 lub 89:1 – w zależności od wymaganej prędkości lub momentu obrotowego. To zapewnia mu testowanie nowych pomysłów w ekonomiczny sposób. Ponadto pomagamy też we wdrażaniu rozwiązań do konkretnych zastosowań.
- Jak duże znaczenie w przemyśle ma korzystanie z platformy Eduard?
AGV i AMR coraz bardziej zyskują na znaczeniu w branży automatyzacji, ale niestety firmy wiedzą o nich zbyt mało. Platforma robotyczna pozwala np. szybko i łatwo przetestować nowy system czujników. Poza tym możliwość niemal dowolnej rozbudowy w celu dopasowania do potrzeb pozwala zagwarantować pracownikom produkcji dostęp do odpowiedniej wiedzy.
- Trendy dotyczące AGV i AMR wskazują na dążenie do większej autonomii tego rodzaju urządzeń. Stają się one podzespołem produkcyjnym i współpracują z modułami produkcyjnymi zamiast z taśmami transporterowymi. AGV i AMR współpracują ze sobą z konieczności. Czy rozumieją się nawzajem?
AGV i AMR są wyposażone w standardowy interfejs VDA5050, który zapewnia też komunikację z centrum sterowania. Klienci mogą łatwo wypróbować nowe oprogramowanie za pomocą platformy takiej jak Eduard, a następnie wykorzystać rezultaty 1:1 w dużych AGV i AMR. Dzięki temu zastosowania można poddać ocenie, wykorzystując symulacje tylko w niewielkim zakresie, ponieważ oprogramowanie pozostaje w zasadzie takie samo, niezależnie od tego, czy używana jest platforma Eduard, czy duży system. Bliźniaczy cyfrowy system, dostępny z platformą na żądanie, pomaga w planowaniu i rozbudowie.

- Układ napędowy platformy Eduard musi też spełniać przyszłe wymagania dotyczące AGV i AMR. Które układy napędowe są wykorzystywane w platformie i dlaczego?
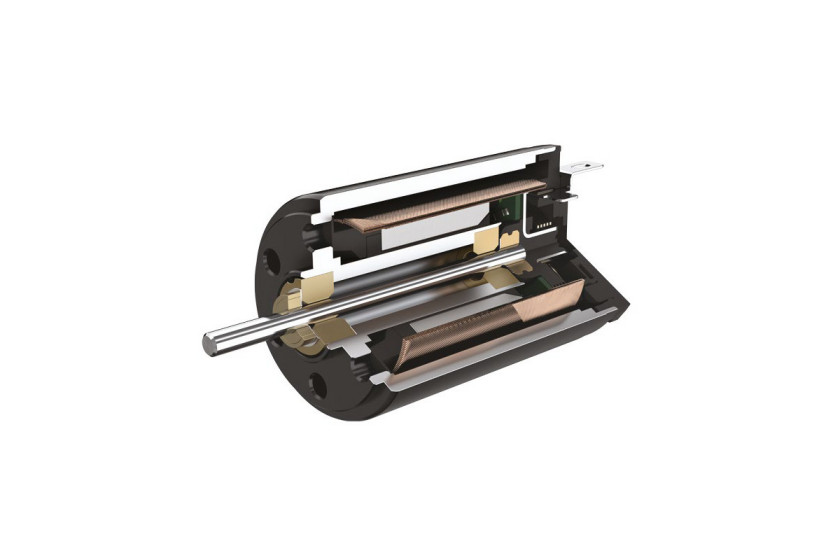
W przypadku naszej platformy do szkoleń i PoC używamy silników miniaturowych DC z układem komutacji z metalu szlachetnego, produkowanych przez FAULHABER. Mimo niewielkiego rozmiaru, potrafią one wygenerować duży moment obrotowy i są szczególnie wydajne energetycznie. Są też łatwe w sterowaniu i odpowiednie do precyzyjnego sterowania w pętli.
W przypadku większych platform używamy dużych silników DC tego samego producenta, aby umożliwić szybkie udowodnienie działania koncepcji, np. łatwość sterowania za pomocą własnych podzespołów elektronicznych. W razie potrzeby w systemach do konkretnych zastosowań zastępujemy je silnikami BLDC, które są trwałe i nie wymagają konserwacji.
- Od dłuższego czasu produkcja jako taka charakteryzuje się ograniczaniem wielkości i zwiększaniem liczby wariantów. Jaki ma to wpływ na logistykę i funkcjonalność AGV i AMR?
Potrzebne są roboty do obsługi mniejszych obciążeń, tzn. mniejsze roboty z napędami o mniejszych wymiarach i większej mocy, takimi jak napędy wysokiej jakości firmy FAULHABER. Autonomiczne pojazdy przemysłowe mają mniej podzespołów elektrycznych i mniejsze akumulatory, co przekłada się na mniejszą masę i obniżone zużycie energii. W przypadku ponownego wzrostu obciążenia da się w łatwy sposób zwiększyć skalę i obsługiwać rozwiązanie jako jednostkę, ponieważ precyzyjne napędy umożliwiają bezkolizyjną pracę robotów.
- Większa funkcjonalność wymaga większej złożoności AGV i AMR. Jakie rozwiązania są możliwe do realizacji i mają sens?
W przypadku AGV i AMR tylko oprogramowanie jest złożone. Najważniejszy staje się odpowiedni plan, dzięki któremu AGV mogą współpracować bez problemów. Aby zagwarantować rozpoznawanie pustych i pełnych palet oraz ich ewentualnego przechylenia, AGV muszą być możliwie najbardziej inteligentne. Tutaj z pomocą przychodzi sztuczna inteligencja (AI). Wykorzystanie AI zwiększa stopień złożoności rozwiązania, a do jego skutecznego przetestowania idealnie nadaje się mały robot.
- Inny trend wiąże się z tworzeniem większych zautomatyzowanych flot, co wymaga odpowiedniego zarządzania.
W takich przypadkach roboty muszą wchodzić ze sobą w interakcje, "myśleć" samodzielnie, wymieniać informacje za pośrednictwem standardowych interfejsów i, w razie konieczności, współpracować. Niezależnie od wielkości AGV/AMR, oprogramowanie pozostaje w zasadzie takie samo, różnica ogranicza się tylko do kilku linijek kodu. Ilość informacji o AMR, której potrzebuje oprogramowanie, jest ograniczona. Musi ono np. obliczyć umiejscowienie robota na planie hali. Układ nawigacji, który jest jednym z niewielu podzespołów znających wymiary robota, wyszukuje następnie odpowiednią ścieżkę. Ponieważ mobilna robotyka znajduje się dopiero w początkowym stadium rozwoju, nie opracowano jeszcze zbyt wielu norm dotyczących tego zagadnienia, co sprawia, że zawsze wskazane jest przeprowadzanie testów.
W celu osiągnięcia żądanej prędkości sterownik silnika oblicza niezbędną liczbę obrotów kół. Regulacja tego ustawienia wymaga trzech linijek kodu lub użycia pliku konfiguracji. FAULHABER dostarcza silniki z przekładniami precyzyjnymi i enkoderami do dokładnego pozycjonowania, które razem zapewniają optymalną wydajność i bezpieczeństwo.
- Intralogistyka 4.0/Przemysł 4.0 wymaga AGV/AMR połączonych w sieć – jak wygląda kwestia obsługi za pośrednictwem chmury lub nawet rozwiązań Edge? W jaki sposób bezpieczeństwo, czyli ryzyko zhakowania, wpisuje się w te scenariusze?
W zależności od producenta systemy mogą być w pewnym stopniu "niehakowalne" dzięki oddzieleniu sprzętu od Internetu. Roboty są wyposażone w skanery bezpieczeństwa i czujniki odległości zapobiegające zderzeniu ze ścianą. Oznacza to, że nawet w razie zhakowania robot nie może wykonać żadnych niebezpiecznych ruchów. Poziom bezpieczeństwa danych w sieci zależy od tego, jak bezpieczna jest sama sieć firmy.
- Założeniem idei Przemysłu 4.0 jest tworzenie samoorganizujących się, heterogenicznych, multimodalnych systemów. Wymagają one wymiany danych między AGV a AMR; AI także potrzebuje dostępu do danych. Jakie wymagania powinny spełniać podzespoły FAULHABER, które także muszą gromadzić i przekazywać dane?
W tym celu wykorzystywana jest sieć 5G lub wewnętrzna firmowa sieć WLAN. Systemy nie muszą otrzymywać danych w czasie rzeczywistym, ponieważ dostępne są dane z fazy planowania – np. trasy i prędkości są dostępne razem z danymi z etapu planowania tras i nie ulegają one ciągłym zmianom. Jeśli robot przemieszcza się z jednego punktu do drugiego, wystarczy tylko przesyłanie sygnału aktywności. Dzięki temu ilość przesyłanych danych jest mniejsza, a sieci nie ulegają przeciążeniu. Dane są łączone ze sobą w AMR i poddawane ocenie. Enkodery rejestrują, co się dzieje, i gwarantują bezpieczeństwo sterowania za pomocą sterowników.
- Jak bezpieczne są AGV i AMR?
Bardzo bezpieczne. Jeśli jeden z czterech silników ulegnie awarii, sterownik silnika rozpoznaje to i zatrzymuje napęd. Jeżeli ktoś wejdzie w strefę jazdy, zostanie to dostrzeżone za pomocą skanera laserowego i aktywacji ulegną hamulce systemu. Te dwa poziomy zabezpieczeń są wystarczające.
- Jakie zagadnienia związane z dalszym rozwojem AGV i AMR nadal wymagają badań? W jaki sposób platforma do testów ulegnie zmianie w zależności od tych wymagań? Jednocześnie oczekiwania dotyczące napędów stale rosną – jak będą wyglądać napędy przyszłości?
Konieczne jest ulepszenie sposobu łączenia robotów w sieć. Przykładowo, cztery roboty mogą razem wykonywać zadanie dotyczące transportu zgodnie z zasadą: wiele małych robotów zamiast jednego dużego. W tym celu potrzebna jest większa liczba mniejszych robotów, które muszą pracować z pełną dokładnością, w przeciwnym razie cała grupa będzie działać nieprawidłowo i w nieskoordynowany sposób. Aby móc poprawić niezawodność, enkodery muszą być całkowicie odporne na zakłócenia, żeby czynniki zewnętrzne w żaden sposób nie wpływały na pracę robotów. Dlatego FAULHABER czasami wykorzystuje po dwa enkodery na każdy silnik.
Uwzględniając różne warianty przekładni FAULHABER o różnych długościach i średnicach oraz enkodery, sterowniki itp., matematycznie można wygenerować 25 milionów kombinacji, z których znaczna część została już wdrożona przez FAULHABER. Dzięki temu każda firma może mieć pewność, że znajdzie optymalny napęd dla siebie. Nawet taki, który spełni wymagania dopiero przyszłych zastosowań.
FAULHABER
www.faulhaber.com










