
Aktualne trendy rozwoju sterowania układami napędowymi zmierzają w stronę układów zcentralizowanych. Oznacza to, że stosowane są stosunkowo proste napędy, których wzajemne zależności koordynowane są przez nadrzędny sterownik ruchu.
Podejście takie, w odróżnieniu do napędów inteligentnych – kosztownych, trudnych w zaprogramowaniu oraz utrzymaniu – znajduje coraz szerszą rzeszę zwolenników. Niewątpliwie jest to struktura, która daje wiele zalet – zarówno z punktu widzenia programisty układu jak i jego użytkownika końcowego. Spójność projektu oraz centralizacja logiki sterowania – od programu standardowego przez obsługę funkcji bezpieczeństwa, a kończąc na zaawansowanym zarządzaniu układem napędowym – to systemowe podejście, które możemy w łatwy oraz szybki sposób zrealizować w oparciu o sterowniki S7-1500T (F).
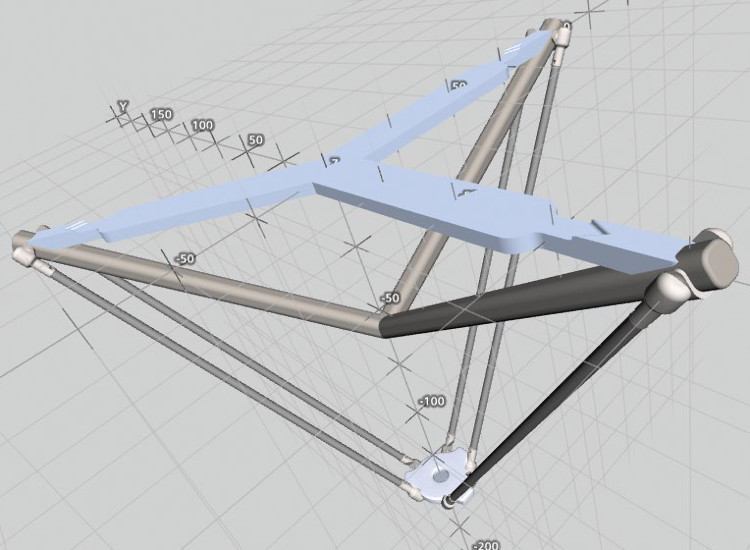
Wśród najnowszych oraz najbardziej zaawansowanych funkcji sprzęgających układy napędowe (serwo) sterownik technologiczny wyposażony został w obsługę układów kinematycznych. Bardzo prosty mechanizm konfiguracji złożonych obiektów mechanicznych pozwala na realizację zaawansowanych aplikacji zrobotyzowanych w oparciu o standardowy układ sterowania PLC.
Dwu-, trzy- lub czteroosiowe predefiniowane obiekty technologiczne zarządzane są przez ustandaryzowane (PLCOpen) funkcje programowe. Dzięki temu, w bardzo przyjazny sposób można zaprogramować przejazd swobodnie interpolowaną trajektorią ruchu, np. w aplikacjach typu pick and place, top loader, frezarka, wycinarka laserowa czy też drukarka 3D.
Jedną z charakterystycznych technik pracy aplikacji zrobotyzowanych (np. w układzie kartezjańskim 2D/3D) jest ruch po interpolowanej nieliniowo ścieżce z nałożonym ruchem sinusoidalnym.
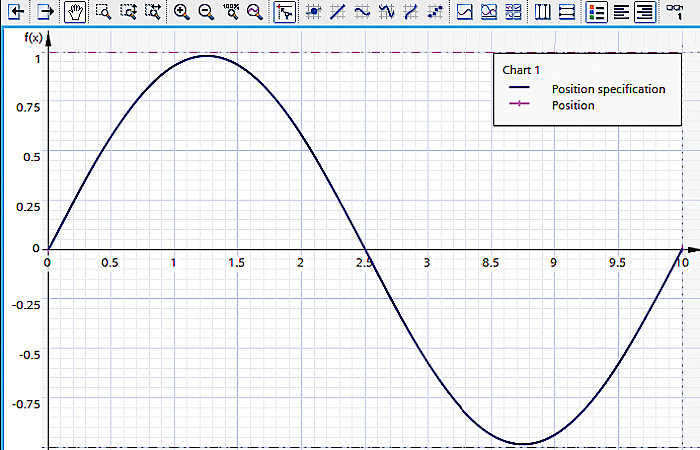
Takie algorytmy są swobodnie aplikowane w robotach lub maszynach CNC, teraz możliwe jest to również na poziomie sterownika SIMATIC. Przy zastosowaniu systemowych układów kinematycznych oraz nieliniowych sprzężeń krzywkowych, można – stosunkowo niewielkim nakładem – zrealizować bardzo wymagające projekty, gdzie występuje konieczność zaimplementowania trajektorii oscylującej, np. nakładanie kleju, frezowanie, spawanie bądź napawanie.
Więcej informacji w powyższym temacie uzyskać można w regionalnych biurach sprzedaży kontaktując się z grupą aplikacyjną Siemens Polska. Zachęcamy również do odwiedzenia strony internetowej dedykowanej sterownikowi technologicznemu: https://www.automatyka.siemens.pl/solutionandproducts_ia/16324.htm.
Radosław Krzyżanowski
Siemens
www.automatyka.siemens.pl









