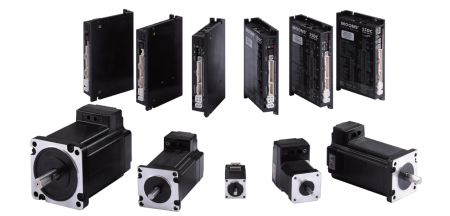
Napędy serwokrokowe z komunikacją sieciową i wbudowanym sterownikiem ruchu.
Napędy Step-Servo serii SSDC to zaawansowane napędy serwokrokowe pracujące w zamkniętej pętli sprzężenia zwrotnego. Umożliwiają pracę w trybie pozycji, prędkości i momentu. Nowość stanowi możliwość wyboru trybu pracy napędu, z trzech dostępnych trybów do wyboru: tryb silnika krokowego z zabezpieczeniem przeciw utknięciu, tryb silnika serwokrokowego, tryb silnika serwokrokowego z obsługą dodatkowego enkodera zewnętrznego (elektroniczna korekcja luzów mechanicznych). Silniki krokowe mogą być wyposażone w dwa typy enkoderów inkrementalnych: magnetyczny o rozdzielczości 4096 imp./obr. (seria RS) oraz optyczny o rozdzielczości 20 000 imp./obr. (seria SS). Dodatkowo silniki mogą być wyposażone w zintegrowany hamulec elektromagnetyczny.
Wysoka jakość wykonania silników, sterowanie z zamkniętej pętli sprzężenia zwrotnego oraz zaawansowane algorytmy sterowania prądem silnika przyczyniły się do uzyskania dużo wyższych momentów obrotowych w stosunku do tradycyjnych systemów opartych na silnikach krokowych i serwokrokowych dostępnych na rynku. Porównując charakterystyki napędów serwokrokowych serii SSDC do tradycyjnych napędów krokowych i serwokrokowych można zauważyć, że moment obrotowy napędu serwokrokowego SSDC jest o ok. 20 – 50% wyższy. Sterowanie w zamkniętej pętli sprzężenia zwrotnego zapewnia cichszą i płynniejszą pracę silnika krokowego oraz zwiększenie sprawności energetycznej, a co za tym idzie dużo niższe temperatury pracy silnika i mniejsze zużycie energii.
Sterowanie silnikiem może odbywać się na kilka sposobów: za pomocą sygnału impulsowego krok-kierunek, sygnału analogowego, komunikacji sieciowej: EtherNet/IP, CANopen, Modbus RTU, Modbus TCP, EtherCAT, SCL i eSCL lub przez wykorzystanie wbudowanego programowalnego sterownika ruchu tzw. Qprogrammera. Silniki serwokrokowe dostępne są w rozmiarach od NEMA11 do NEMA34, z momentem trzymającym do 8,2 Nm.
Zalety:
Podstawowe parametry:
Funkcje dodatkowe:
Sposoby sterowania:
Sygnały I/O:
Więcej na: pivexin-tech.pl