PROJEKT
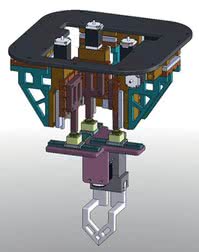
Rys. 1. Projekt manipulatora CARMA w programie SolidWorks Assembly
Manipulatory Tri-Sphere pozwalają na precyzyjną regulację położenia obiektu o sześciu stopniach swobody. Bazują one na mechanizmie podnośnikowym, pozwalającym na dokładną regulację pozycji w pionie i poziomie, z możliwością późniejszego przesuwania w poziomie w obrębie ustalonych koordynat początkowych. Za pomocą trzech takich, ułożonych w odpowiedni sposób, mechanizmów można stworzyć system zdolny do wykonania dowolnego ruchu w przestrzeni.
Firma Square One wykorzystała to rozwiązanie do zbudowania manipulatora o nazwie Tri-Sphere, pozwalającego na precyzyjne pozycjonowanie czujników, manipulatorów oraz przenoszenie do operatora odczuć ze środowiska zewnętrznego, takich jak wibracje, ruch i siła. Wykorzystanie zaawansowanego sprzężenia haptycznego znacznie zwiększa zakres zastosowania bezzałogowych pojazdów naziemnych (UGV - Unmanned Ground Vehicles).
Manipulator wyposażony w taką funkcję pozwala na dokładniejszą inspekcję otoczenia: kopanie gruntu, przenoszenie próbek, badanie obiektów i wykonywanie innych zadań, których zwykłe roboty nie są w stanie wykonać. Rezultatem tych prac jest powstanie robotów pracujących na ograniczonym obszarze typu CARMA (Constrained Area Robotic Manipulator).
Praca nad realizacją projektu była okazją do poprawy efektywności procesu projektowania w firmie oraz znacznego rozszerzenia wiedzy jej pracowników na temat mechaniki ruchu. Umożliwiły to narzędzia do prototypowania firmy National Instruments. Wcześniejszy projekt systemu pozycjonowania był przez nas tworzony w programie Solid Works, za pomocą którego przygotowywane były modele 3D i rysunki techniczne detali do produkcji.
Po zakończeniu prac projektowych i montażu całości, w kolejnym kroku opracowany został system sterujący, bazujący na komputerze w standardzie PC/104, który razem z częścią mechaniczną tworzy spójny system mechatroniczny. Jego funkcjonalność opiera się w dużej mierze na oprogramowaniu, które analizuje sygnały z czujników i podejmuje akcje sterujące elementami wykonawczymi.
Spójne połączenie części mechanicznej i sterującej pozwala też na szybsze projektowanie i zmniejsza liczbę iteracji polegających na poprawianiu i doskonaleniu konstrukcji prototypowej. Zapewnienie takich możliwości wymagało zastosowania nowego podejścia do realizacji funkcji sterujących.
W pierwszym kroku opracowany został "logiczny" zestaw równań ruchu, których uniwersalna i modułowa implementacja sprawiają, iż, zmieniając parametry geometrii ruchu, można je dostosować do potrzeb innych projektów. Możliwość pozycjonowania manipulatora w dowolnym miejscu w przestrzeni roboczej znacznie rozszerza funkcjonalność Tri-Sphere.
Stało się jednak niezbędne zbudowanie platformy testowej, za pomocą której można było sprawdzić funkcjonalność i działanie równań modelujących ruchy. Szybko okazało się, że nie jesteśmy w stanie przygotować kilku różnych konfiguracji sprzętowych przeznaczonych wyłącznie do testowania, stąd zainteresowaliśmy się możliwością wykorzystania oprogramowania symulacyjnego i uniwersalnej platformy sprzętowej, jako bazy do testowania naszej nowej technologii.
WYBÓR NARZĘDZIA PROGRAMISTYCZNEGO
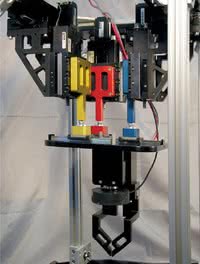
Rys. 2. Gotowy manipulator CARMA
Poszukiwania dostępnego na rynku oprogramowania doprowadziły do wstępnej selekcji produktów, w wyniku której lista została ograniczona do pakietu MATLAB firmy Mathworks oraz LabVIEW firmy National Instruments z modułem Soft Motion dla SolidWorks. W kolejnym kroku opracowane zostały założenia projektu w SolidWorks, a następnie za pomocą MATLAB-a dokonano rozwiązania równań opisujących ruch W następnym kroku, za pomocą LabVIEW, stworzono interfejs użytkownika.
Wszystkie polecenia sterujące silnikami manipulatora wykonane zostały jako tzw. Linux Programmable Machines, niemniej firma aktywnie poszukiwała przyjaznych w użyciu narzędzi programowych, za pomocą których możliwa byłaby standaryzacja architektury sterującej. W końcu wybór padł na LabVIEW, który finalnie stał się naszym narzędziem, za pomocą którego przygotowana została aplikacja sterująca.
Po wzięciu udziału w 2009 w konferencji na temat projektowania graficznych systemów kontrolno-pomiarowych NIWeek, doszliśmy do wniosku, że wiele pakietów narzędziowych firmy NI oraz dostępnych bibliotek funkcji odpowiada naszym potrzebom w zakresie projektowania.
LabVIEW umożliwia odczyt danych przygotowanych za pomocą środowiska MATLAB, w którym stworzone zostały profile ruchów, a moduł LabVIEW NI Soft Motion pozwala na sterowanie silnikami krokowymi napędzającymi manipulator i odczytywanie danych z czujników za pośrednictwem modułów serii C dla NI CompactRIO.
Co więcej instrumenty wirtualne mogą komunikować się z SolidWorks, przez co finalne zdecydowaliśmy się na całkowitą implementację systemu testującego dla Tri-Sphere, (zarówno warstwy sprzętowej jak i programowej) w NI LabVIEW.
W kolejnym kroku zdecydowaliśmy się wykorzystać potencjał NI LabVIEW do realizacji funkcji matematycznych wysokiego poziomu, które wcześniej wykonywane były w MATLAB-ie. Opracowany tester działa w oparciu o moduły NI cRIO-9024 embedded real-time controller i sześć sterowników silników krokowych NI 9512.
SYMULACJA
Po opracowaniu instrumentów wirtualnych (VI) wykonujących obliczenia parametrów ruchu i zapewniających logikę przemieszczania ramienia Tri-Sphere, równolegle zakończony został projekt mechaniczny urządzenia w programie SolidWorks. W kolejnym kroku, po zakończeniu prac nad VI i zbudowaniu modelu działania aplikacji, rozpoczęto proces integracji.
Za pomocą LabVIEW projekt VI połączono z danymi SolidWorks, dzięki czemu stało się możliwe identyfikowanie w VI osi i kierunków działania manipulatora. Po kilku dniach badań nad tym jak kompletnie zostało wykonane połączenie danych pomiędzy SolidWorks i LabVIEW, firma przystąpiła do symulacji systemu i tworzenia wirtualnego prototypu.
TESTOWANIE TRI-SPHERE
Podczas testów najpierw skontrolowano działanie interfejsu użytkownika i instrumentów wirtualnych, odpowiedzialnych za poruszanie manipulatorem, po to aby upewnić się, że działają całkowicie poprawnie. Okazało się, że kilka osi zostało nieprawidłowo zaprogramowanych w VI, ale bez problemu udało się poprawić te pomyłki.
Błędy wykryto także w algorytmach poruszania manipulatorem, a przyczyną okazały się zagubione znaczniki w kodzie oprogramowania. Bez drobiazgowej symulacji działania wykrycie tych pomyłek na tak wczesnym etapie projektu nie byłoby możliwe. Oczywiście wykrycie i poprawienie błędów przed finalnym uruchomieniem testera na fizycznym manipulatorze zapobiegło niepotrzebnym awariom i możliwym uszkodzeniom.
MANIPULATOR CARMA
Kolejnym krokiem były specyficzne symulacje związane z ruchem i warunkami, jakie panują w projekcie CARMA. Do ich przeprowadzenia został wykorzystany projekt i modele zdefiniowane w programie SolidWorks. Dodatkowo w LabVIEW stworzono plik konfiguracyjny charakterystyczny dla danego modelu manipulatora, w którym zapisane zostały graniczne wartości zasięgu i podobne dane. Na bazie tego pliku możliwe jest także wizualizowanie w przestrzeni obszaru pracy manipulatora.
WYNIKI
Symulacja projektu pozwoliła także na określenie wartości granicznych parametrów dla zasięgu, wymiarów i parametrów krytycznych dla części składowych manipulatora. Oparcie tych prac na oprogramowaniu LabVIEW i instrumentach wirtualnych pozwoliło na płynne przejście z etapu pisania kodu oprogramowania do działającego prototypu urządzenia.
Do zarządzania złożonymi ruchami i funkcjami manipulatora okazało się konieczne stworzenie dodatkowych VI, ale dzięki temu, że podstawowe jednostki sterujące były gotowe, prace te zostały wykonane znacznie szybciej. Inżynierowie firmy byli zaskoczeni tym, że po pomyślnym przeprowadzeniu testów i poprawieniu błędów w algorytmach, po raz pierwszy w historii firmy Square One, nie było potrzeby dokonywania żadnych poprawek po podłączeniu fizycznego urządzenia.
Przez to, że pierwsza implementacja oprogramowania zarządzającego ruchem mogła być testowana z wykorzystaniem projektu wykonanego za pomocą SolidWorks, całość cyklu projektowego była znacznie szybsza. Udało się też połączyć pracę zespołów zajmujących się konstrukcją mechaniczną z pracami nad oprogramowaniem, co do tej pory nie miało miejsca.
Lisa Mosier
National Instruments Poland
poland.ni.com










