
Polski robot R‑BOS – innowacja z Politechniki Białostockiej
Robot R-BOS jest efektem połączenia doświadczenia założyciela startupu z potencjałem Politechniki Białostockiej. Naukowcy z tej największej uczelni technicznej w północno-wschodniej Polsce mieli do rozwiązania szereg zagadnień mechanicznych oraz kwestię wykorzystania sztucznej inteligencji w procesie zbioru truskawek.
W skład zespołu pracującego nad projektem weszli: dr hab. inż. Paweł Dzienis - adiunkt w Katedrze Układów Dynamicznych Wydziału Mechanicznego, dr inż. Karol Golak - adiunkt w Katedrze Inżynierii Materiałowej i Produkcji oraz mgr inż. Daniel Ołdziej z Wydziału Mechanicznego Politechniki Białostockiej.
Politechnika Białostocka wsparła startup w ramach programu Hub of Talents 3. Dzięki zaangażowaniu ekspertów z uczelni, dostępne technologie zostały zweryfikowane i przetestowane zarówno w laboratorium, jak i bezpośrednio na plantacji.
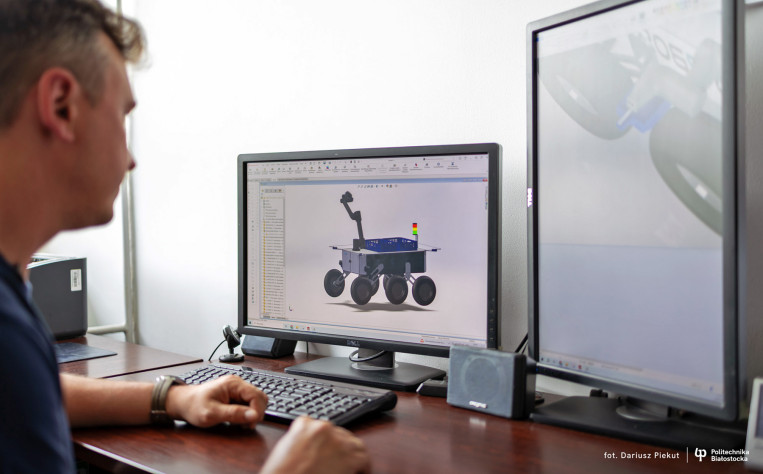
Podczas inkubacji w Hub of Talents 3 udało się zrealizować wszystkie zaplanowane cele, w tym opracowanie koncepcyjnego modelu CAD i kilku modeli designerskich oraz stworzenie modelu biznesowego, planu marketingowego i strony internetowej. Przeprowadzono spotkania z potencjalnymi partnerami, dostawcami i klientami.
Największą wartością dla projektu okazały się nawiązane relacje z inspirującymi ludźmi oraz zacieśnianie współpracy z ekspertami Politechniki Białostockiej, którzy dzielą się swoją wiedzą i wspierają rozwój projektu.
Jak działa robot do zbioru truskawek?
Robot R-BOS to maszyna, która do identyfikacji i zbierania owoców wykorzystuje uczenie maszynowe i rozpoznawanie obrazu. Koncepcja robota zrodziła się z potrzeby usprawnienia codziennych prac na plantacjach, inspirowanej osobistym doświadczeniem Grzegorza Faszczy, właściciela firmy R-BOS Sp. z o.o.
Aby skutecznie poruszać się w terenie plantacji, zawieszenie robota zostało dostosowane do możliwości poruszania się po nierównym terenie. Kluczowym elementem konstrukcji jest ramię, które wychyla się, by obciąć truskawkę, co wymagało zapewnienia odpowiedniej stabilności całej maszyny.

Ważnym aspektem projektu było także bezpieczeństwo pracy. Robot R-BOS został zaprojektowany zgodnie z normami technicznymi i wymogami bezpieczeństwa pracy, co widać m.in. po widocznym sygnalizatorze świetlnym. Wyzwaniem dla konstruktorów było automatyczne zatrzymywanie się robota w momencie zbliżenia się do przeszkody. Zrezygnowano z kamer na rzecz zabezpieczenia mechanicznego opartego o wyłączniki krańcowe, co było podyktowane ryzykiem zalania kamer sokiem z owoców podczas zbiorów. Cały projektowany robot do zbioru truskawek ma wymiary około 150 x 90 cm.
Czy roboty zastąpią ludzi przy zbiorze truskawek? Czy łatwo dostrzec zalety automatyzacji zbiorów?
Automatyzacja zbioru truskawek, reprezentowana przez roboty, jak np. R-BOS, może polskim plantatorom przynieść szereg korzyści ekonomicznych i organizacyjnych. Wprowadzenie robota do zbioru truskawek może nie tylko usprawnić pracę plantatorów, ale także wyznaczyć nowe standardy w branży agrotechnicznej. To przykład, jak pasja, doświadczenie i innowacyjność mogą zmienić oblicze rolnictwa.
Kwestia zastąpienia pracy ludzkiej przez roboty w sadownictwie jest jednak złożona. Chociaż robot R-BOS ma potencjał do usprawnienia pracy plantatorów, na razie trudno znaleźć wiarygodne analizy czy przewidywania dotyczące przyszłości pracy sezonowej i jej automatyzacji, ograniczeń technologicznych czy zagadnień etycznych związanych z robotyzacją zbiorów. Jednak innowacyjny robot R-BOS może być polską odpowiedzią na globalne trendy automatyzacji w rolnictwie.
Wszystkie ilustracje i zdjęcia: Politechnika Białostocka
Źródło: Politechnika Białostocka













