ROBOT M-3iA
W zależności od konfiguracji osi, dostępne są dwie wersje robota:
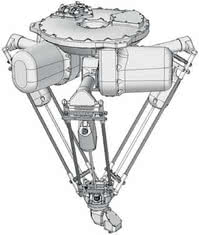
- M-3iA/6S (rys. 1) - 4-osiowa, w tym pojedyncza oś obrotu nadgarstka. Ta wersja umożliwia pobieranie z dużą prędkością wielu detali lub produktów znajdujących się na przenośniku.
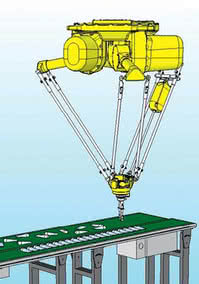
- M-3iA/6A (rys. 2) - 6-osiowa w tym trzy osie obrotu nadgarstka. Ten model może swobodnie zmieniać orientację nadgarstka dzięki czemu pozwala na realizację skomplikowanego montażu, lutowania, klejenia, itp.
Zarówno w wersji cztero- jak i sześcioosiowej silniki robota zostały umieszczone z dala od nadgarstka, dzięki czemu nie są narażone na duże przyspieszenia oraz w zależności od aplikacji, działanie agresywnych materiałów. Wszystkie połączenia i elementy są całkowicie zamknięte i uszczelnione zgodnie ze stopniem ochrony IP67.

Fot. 1. Robot M-3iA/6S - idealny do przenoszenia i układania z dużą prędkością |

Fot. 2. Robot M-3iA/6A - stworzony dla aplikacji wymagających skomplikowanych ścieżek ruchu |
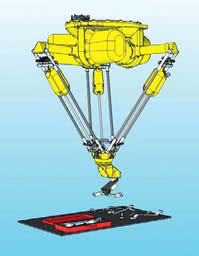
Zdając sobie sprawę z potrzeby wysokiej wydajności (dużych prędkości) w aplikacjach układania i pakowania również w przemyśle farmaceutycznym i spożywczym, firma FANUC Robotics opracowała specjalną wersję robota M-3iA, która spełnia wymogi umożliwiające pracę w wyżej wymienionych gałęziach przemysłu (rys. 3).
Spożywczo-farmaceutyczna wersja robota M-3iA charakteryzuje się białym, epoksydowym wykończeniem z szorstkiego ochronnego materiału, który ułatwia dezynfekcję robota z kwaśnych i alkalicznych płynów. Należy dodać, że ze względu na kontakt z żywnością i lekami, w wersji tej zastosowano jadalny gatunek smaru znajdujący się w przekładniach robota - wyeliminowane zostało ryzyko zanieczyszczenia produktów.
Fot. 3. M-3iA Food robot - spożywcza wersja robota M-3iA.
Firma FANUC Robotics opracowała unikalne rozwiązanie trójosiowego nadgarstka w robocie o kinematyce równoległej, które umożliwia dokładne pozycjonowanie nawet podczas bardzo szybkiego ruchu. Przy prędkości nadgarstka 4000o/s w wersji 4-osiowej i 2000o/s w wersji 6-osiowej, powtarzalność pozycjonowania wynosi 0,1mm. Model 4-osiowy M-3iA/6S ma przelotowy nadgarstek.
Przelot przebiega przez centrum chwytaka, co redukuje zakłócenia, umożliwia przeprowadzenie przewodu pneumatycznego do ssawki/chwytaka i ogranicza przestoje w skutek zmniejszenia liczby pęknięć przewodu, a także pozwala na pracę z bardzo dużymi prędkościami. Dla skomplikowanych procesów, gdzie wymagana jest funkcjonalność ludzkiego nadgarstka, przeznaczona jest wersja sześcio osiowa M-3iA/6A.
Ze swoją zdolnością do odbioru części, montowania ich przy wymaganym kącie i obracania nimi skutecznie zastępuje człowieka, jednak swoje prace wykonuje znacznie szybciej, z większą powtarzalnością, precyzją i w nienormowanym czasie pracy. Robot M-3iA firmy FANUC Robotics jest wyposażony w inteligentny kontroler R-30iA Mate z wbudowanym systemem wizyjnym FANUC iRVision oraz może być wyposażony w wiele innych opcji programowych i sprzętowych zwiększających elastyczność robota.
Wszystko, czego robot potrzebuje, aby korzystać z systemu wizyjnego iRVision to kamera i przewód łączący ją z kontrolerem. Obudowa robota posiada miejsce przeznaczone na montaż kamery, tak aby po przymocowaniu obejmowała ona swoim polem widzenia cały zakres pracy robota M-3iA.
PRZYKŁADY APLIKACJI
Dzięki wykorzystaniu systemu wizyjnego iRVision i opcji Visual Line Tracking (rys. 4), pobieranie detali z, i odkładanie ich na taśmociąg dla robota M-3iA nie jest żadnym problemem. Pobierane detale mogą mieć dowolną, losową orientację. System wizyjny rozpoznaje orientację manipulowanego przedmiotu i na podstawie wcześniej zdefiniowanego wzorca oblicza wektor przemieszczenia.
Robot korzystając z wektora przemieszczenia potrafipobrany detal odłożyć w jednej, ściśle określonej pozycji w odpowiednim miejscu. Jak już wcześniej wspomniano, w aplikacjach gdzie manipulowane przedmioty charakteryzują się budową wymagającą większej elastyczności operowania (np. manipulacja narzędziami - rys. 5), znajdzie zastosowanie sześcioosiowa wersja robota M-3iA.
Fot. 4. M-3iA/6S pobiera dowolnie zorientowane detale i układa je w konkretny, określony szyk |
Fot. 5. M-3iA/6A dzięki trójosiowemu nadgarstkowi potrafi uchwycić przedmioty o skomplikowanej budowie |
Robot, na podstawie danych z systemu wizyjnego, decyduje w jaki sposób uchwycić przedmiot. Jeżeli leży on w trudnej pozycji, która uniemożliwia jego ułożenie w skrzynce w jednym ruchu, robot najpierw przekłada przedmiot do innej pozycji, a następnie potrafiprzetransportować i ułożyć go w skrzynce narzędziowej.
FANUC Robotics Polska Sp. z o.o.
www.fanucrobotics.pl










