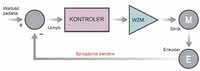
Rys. 1. Zasada działania napędu pracującego w zamkniętej pętli sprzężenia zwrotnego
Złożone algorytmy filtracji realizowane przez procesor sygnałowy i ciągła kontrola wektora prądu pozwalają na uzyskiwanie płynnego ruchu obrotowego wału silnika od 0,2 obrotu/ minutę. Dzięki regulacji prądu silnika w zależności od zmieniającego się obciążenia udało się ograniczyć ciepło wytwarzane w silniku. Sterownik silnika wyposażono w port RS485.
Za pomocą umieszczonego w obudowie mikroprzełącznika wybieramy adres sieciowy napędu w zakresie od 0 do 15, który jest wyświetlony tuż obok, na wskaźniku LED. W sieci pracować może maksymalnie 16 napędów. Istnieje kilka metod sterowania napędami Ezi-Servo Plus-R. Jedną z nich jest stworzenie w pamięci sterownika tabeli pozycji (listy kolejnych najazdów) za pomocą dostarczanego wraz z napędem oprogramowania EziMotion Plus-R pracującego w środowisku Windows.
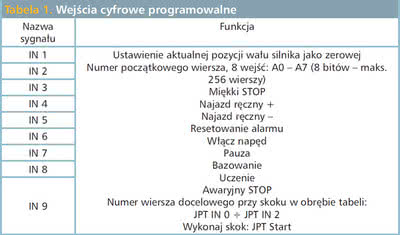
Tabela 1. Wejścia cyfrowe programowalne |
Tabela zapisywana jest w pamięci Flash ROM sterownika i aktywować ją można za pomocą wejść cyfrowych lub poprzez łącze szeregowe RS485. Narzędzie EziMotion Plus-R umożliwia również zmianę parametrów napędu (np. rozdzielczości czy współczynnika wzmocnienia) oraz zaprogramowanie wejść/wyjść. Największe możliwości daje nam jednak konfiguracja, w której system nadrzędny (np. PC lub PLC) komunikuje się z napędem poprzez łącze szeregowe RS485.

Rys. 2. Sterowanie napędami poprzez R S485
Rozkazy przesyłane są do napędu w postaci znaków ASCII. Ramka składa się z elementów stałych takich jak nagłówek i koniec ramki oraz części zmiennej zawierającej adres napędu, typ rozkazu wraz z parametrami oraz sumę kontrolną. Istnieje również możliwość napisania aplikacji w języku C++, działającej np. na komputerze klasy PC. Potrzebne do tego celu biblioteki DLL dostarczane są wraz z napędem.
Poprzez łącze szeregowe istnieje możliwość konfiguracji napędu w jeszcze szerszym zakresie, ponieważ dodatkowo mamy dostęp do kilku funkcji, których nie ma w oprogramowaniu EziMotion Plus-R. Wysyłając na bieżąco kolejne komendy przez łącze szeregowe RS485, możemy podczas pracy silnika zmienić wartość pozycji zadanej lub zmienić prędkość obrotową wykonywanego przejazdu.
Istnieje również możliwość wydawania rozkazów całej grupie napędów (maksymalnie 16 napędów). Dzięki tej właściwości możliwe stało się zrealizowanie interpolacji liniowej poprzez łącze szeregowe. Wysyłając odpowiedni rozkaz do grupy napędów, należy po prostu określić, które z nich mają brać udział w ruchu oraz podać parametry przejazdu dla każdego z nich.
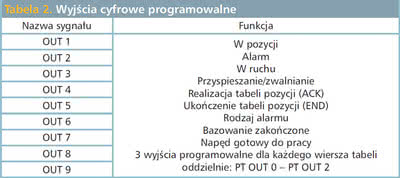
Tabela 2. Wyjścia cyfrowe programowalne |
Sterownik silnika z rodziny Ezi-Servo Plus- R wyposażono w 9 programowalnych wejść (2 wejścia przeznaczone są pod wyłączniki krańcowe oraz 1 wejście do czujnika pozycji bazowej) i 9 programowalnych wyjść. W tabelach 1 i 2 zestawiono funkcje, jakie mogą zostać przypisane do programowalnych wejść i wyjść. Sterownik wyposażono również w cztery diody statusu (tabela 3).

Rys. 3. Widok okna program ProtocolTest
W zestawie z każdym napędem Ezi-Servo Plus-R otrzymujemy płytę CD-ROM. Zawiera ona oprogramowanie EziMotion Plus-R, sterowniki do konwertera RS485/USB firmy Fastech oraz program ProtocolTest, który jest przydatny przy diagnozowaniu problemów komunikacyjnych. Za jego pomocą możemy wysyłać komendy zapisywane znakami ASCII. Po uruchomieniu ProtocolTest wybieramy port, do którego podłączony jest napęd, wpisujemy jego adres i wybieramy jedną z komend.
Program automatycznie przelicza sumę kontrolną i całość już jest gotowa do przesłania do sterownika Ezi-Servo Plus-R. Zaawansowane napędy serwokrokowe Ezi-Servo Plus-R znajdują zastosowanie w aplikacjach, w których konieczne jest pozycjonowanie większej liczby napędów z jednego punktu. System nadrzędny (np. PC lub PLC) poprzez łącze szeregowe RS485 na bieżąco może przesyłać pozycje docelowe dla poszczególnych napędów.
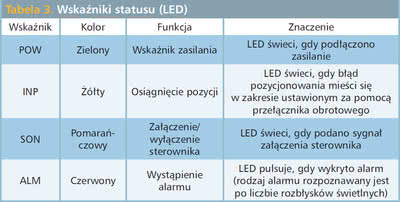
Tabela 3. Wskaźniki statusu (LED) |
Wykorzystanie napędów Ezi-Servo Plus-R w takich aplikacjach pozwala ograniczyć ilość przewodów i szybkich wyjść w sterowniku. W aplikacjach o niezbyt dużym stopniu skomplikowania, programując całe sekwencje ruchu w tabeli pozycji, możemy pracować nawet bez sterowania nadrzędnego.
Eldar
www.eldar.biz









