Technologia pomiarów z wykorzystaniem czujników SAW zyskuje uznanie jako sposób dokładnego określenia obrotów elementów ruchomych w szeregu zastosowań, do których należą głównie te związane z przemysłem, motoryzacją i ogólnie transportem. Wykorzystanie czujników tego typu w aplikacjach pomiarowych, testowych i sterowania pozwala na dokładne określenie warunków pracy silnika bądź innego urządzenia będącego w ruchu i, dzięki użyciu odpowiednich algorytmów sterowania, jego poprawną kontrolę. Przykładem są systemy przeniesienia napędu w samochodach, gdzie użycie czujników SAW pozwala na dokładny pomiar bieżących obrotów, a przez to polepszenie ogólnej jakości pracy napędu i zmniejszenie zużycia paliwa. Jeżeli użyte one zostaną w samym silniku, umożliwiają lepszą kontrolę jego pracy, co przyczynia się do zwiększenia wydajności oraz żywotności. W motoryzacji czujniki SAW mogą być wykorzystywane również w układzie sterowniczym, jak i samych kołach, co ma szczególnie duże znaczenie w przypadku ich aplikacji w samochodach z napędem na 4 koła. Ostatecznym celem ich wykorzystaniem są systemy elektronicznego wspomagania i kontroli jazdy.
Podstawy technologii SAW
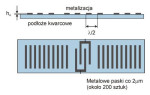
Rys. 2: Budowa czujnika SAW
Elementy SAW wytwarzane są w procesach fotolitograficznych podobnych do tych, jakie stosowane są do produkcji układów scalonych, przy czym jako podłoże w czujnikach SAW stosowane są płytki kwarcowe. Ich użycie wynika ze względów ekonomicznych, jak też charakterystyk fizycznych materiału. Do ostatnich należy w szczególności zaliczyć anizotropowość kwarcu, co pozwala, poprzez wybór odpowiedniej orientacji krystalograficznej podłoża, zapewnić jego żądane cechy – np. związane z wpływem temperatury. Budowę elementu SAW przedstawiono na rys. 2.
Konstrukcja elementu SAW (odstępy między paskami metalizacji) określa jego charakterystykę częstotliwościową, a w szczególności częstotliwość rezonansową. Z tego powodu elementy te wykorzystywane są często jako filtry oraz linie opóźniające w urządzeniach bezprzewodowych – telefonach komórkowych, stacjach bazowych, ale też radarach i telewizorach. Zakres ich częstotliwości pracy jest duży i wynosi, w zależności od elementu i aplikacji, od 30MHz do 3GHz.
W przeciwieństwie do filtrów SAW wykorzystywanych np. w telekomunikacji, w przypadku czujników obrotów wykorzystywane jest zjawisko polegające na zmianie częstotliwości rezonansowej spowodowanej wpływem zwiększenia się (zmniejszenia) naprężenia czujnika. Przyczyną tego mogą być zmiany temperatury, ale również czynniki mechaniczne, takie jak odkształcenie spowodowane dużymi siłami odśrodkowymi. W praktyce im większe jest naprężenie podłoża czujnika, zmienia się czas propagacji fali dźwiękowej w podłożu i częstotliwość rezonansowa czujnika proporcjonalnie maleje.

Rys. 3: Dwa czujniki SAW wykonane na jednym podłożu i połączone ze wspólną cewką sprzężoną z odbiornikiem
Technologia czujników z falą powierzchniową pozwala m.in. na bezkontaktowy pomiar stopnia odkształcenia czujnika, co wykorzystywane jest w pomiarach obrotów, ciśnienia, temperatury i innych parametrów. Wykorzystywane jest do tego przesyłanie fali w zakresie mikrometrów o bardzo niewielkich amplitudach. W aplikacjach wykorzystuje się najczęściej dwa czujniki ułożone pod kątem +/- 45°, które są wykonane na jednym podłożu i połączone elektrycznie (rys. 3). Rozwiązanie takie pozwala na kompensację zmian temperaturowych (np. na skutek nagrzewania się silnika), jak też zniwelowanie wpływu zginania się jego osi.
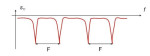
Rys. 4: Pomiar częstotliwości różnicowej z dwóch czujników
Czujniki obrotów SAW są montowane hermetycznie w obudowie, co zapewnia ich odizolowanie od środowiska zewnętrznego i trwałość. Jednocześnie, w przeciwieństwie do zastosowań telekomunikacyjnych, gdzie czujniki są separowane od reszty systemu, w aplikacjach pomiarowych konieczne jest ich sprzężenie z dalszą częścią układu. Dotyczy to również pomiarów obrotów, w której przesył energii następuje wprawdzie bezprzewodowo, ale sam czujnik jest połączony z cewką za pomocą której sprzężony jest zdalnie z odbiornikiem. Połączenie to musi być również wykonane z użyciem odpowiednich materiałów, w przeciwnym razie mogą one wpływać na wyniki pomiarów przy zmianie temperatury otoczenia lub występujących naprężeń.
|
Czujniki obrotów SAW w pigułce
Czujniki obrotów z falą powierzchniową cechują się:
- możliwością pracy bezprzewodowej bez własnego zasilania,
- częstotliwością rezonansową około 433MHz,
- dużym pasmem pomiarowym (do 1kHz),
- małymi wymiarami,
- dużą dokładnością pomiarów,
- odpornością na zaburzenia elektromagnetyczne,
- dużym zakresem temperatur pracy (do 150°C),
- możliwością pracy w trudnych warunkach środowiskowych,
- długoterminową stabilnością parametrów.
|
Czujnik SAW – jak to działa?
Cykl pomiarowy w układzie z czujnikiem SAW sprowadza się do przesłania energii do czujnika, a następnie odbioru impulsu przez niego generowanego. Dokładniej rzecz ujmując przemienne pole elektromagnetyczne, w którym znajduje się piezoelektryczny czujnik obrotów SAW, powoduje powstanie fali akustycznej propagującej się w podłożu czujnika. Fala ta wytwarza, dzięki odpowiedniej budowie elementu, przemienne pole elektromagnetyczne, które jest detekowane przez nieruchomy odbiornik. Częstotliwość odebranego impulsu (częstotliwość rezonansowa czujnika) zależy od stopnia naprężenia elementu SAW i jest ona w przybliżeniu odwrotnością podwojonej odległości pomiędzy kolejnymi prążkami materiału przewodzącego naniesionego na podłoże czujnika. Czas trwania impulsów gasnących generowanych przez czujnik po ustaniu pracy nadajnika jest zależny od jego cech fizycznych. Czujniki pracują w zakresie częstotliwości 400-500MHz.
Rys. 5: Wartości pola elektromagnetycznego w czasie podczas cyklu pomiarowego.
Należy zaznaczyć, że impuls generowany przez nadajnik, którym jest zwykle pierścień pełniący rolę jednej z cewek sprzężonych (drugą jest pierścień podłączony do czujnika), jest tak zaprojektowany, aby energia była przekazywana tylko do jednego czujnika SAW. Jednocześnie pomiar z wykorzystaniem czujnika SAW odbywa się na pomiarze różnicy częstotliwości pomiędzy aktywnym i referencyjnym czujnikiem SAW, co pozwala na zniwelowanie sygnału sumacyjnego. Dodatkowo, w celu zwiększenia poprawności wyników, stosuje się wielokrotny pomiar i uśrednianie wyników, co pozwala systemowi pomiarowemu na odrzucenie skrajnych wartości.
Układ pomiarowy w praktyce
W układzie z czujnikami SAW do transmisji danych wykorzystana jest technika bezprzewodowa polegająca na transmisji na bliską odległość. Przykładową aplikację pokazano na rys. 6.

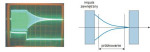
Rys. 6: Przykładowa aplikacja czujnika obrotów SAW
Do przekazu energii zasilania oraz pomiarów wykorzystane są elementy obrotowe, a sam czujnik SAW jest połączony z obrotowym pierścieniem, który jest odpowiednio dobierany do aplikacji (rys. 6). Druga część układu, jak już wspomniano, to nieruchomy pierścień i podłączony do niego system elektroniczny, który pełni rolę nadajnika i układu przetwarzającego informacje z czujnika. Pomiędzy dwoma pierścieniami występuje typowo szczelina o wielkości 1mm. Ponieważ pierścienie mogą być odpowiednio dobierane w zależności od zastosowania, układ z SAW charakteryzuje się elastycznością zastosowań, gdyż czujniki obrotów mogą być instalowane praktycznie na każdym elemencie będącym w ruchu. Poza obszarem czujnika, tj. od odbiornika do systemu pomiarowego, sygnały są już transmitowane z wykorzystaniem połączenia kablowego. Coraz częściej stosuje się tutaj metodę ich lokalnego przetwarzania na sygnał cyfrowy, co pozwala na łatwą i niezawodną transmisję z wykorzystaniem sieci komunikacyjnej takiej jak przykładowo CAN. Ponieważ dane mogą być zbierane w czasie bieżącym i z dużą częstotliwością, technologia pomiaru obrotów z czujnikiem SAW wykorzystywana jest w aplikacjach, gdzie wymagany jest ten rodzaj pomiarów – w szczególności w motoryzacji.
Czujniki w systemach napędowych samochodów

Rys. 7: Czujniki obrotów SAW mogą być montowane w różnych miejscach w zależności od aplikacji.
W większości współczesnych pojazdów z automatyczną skrzynią biegów bieżące obroty są jednym z parametrów na podstawie których układ sterowania podejmuje decyzję o zmianie biegu. O ile układy te bazują na empirycznie dobranych parametrach, trudno jest uwzględnić w ich pracy wszystkie cechy i bieżące parametry układu napędowego. Dotyczy to w szczególności zaawansowanych funkcji związanych np. z deaktywacja cylindrów, ale też pracy systemów związanych z napędem – np. włączanie i wyłączanie układu klimatyzacji i wentylacji (HVAC). Ich uwzględnienie jest istotne dla zachowania dużej jakości i wydajności pracy systemu napędowego, jak też ma wpływ na jego bezawaryjność. Odpowiedni pomiar obrotów wiąże się również ze zwiększeniem stabilności przenoszenia napędu, a więc ogólnego bezpieczeństwa podróżnych. W przypadku samochodów z napędem na 4 koła układ napędowy staje się jeszcze bardziej złożony i istnieje potrzeba jeszcze dokładniejszych pomiarów obrotów (również w przypadku samych kół). Czujniki obrotów stosowane dotychczas w tego typu aplikacjach wymagały albo przeniesienia informacji (np. poprzez obracające się pierścienie), albo działały bezprzewodowo na zasadzie magnetostrykcji. Ich wykorzystanie ograniczało się często do laboratoriów, gdzie testowane były układu napędowe i systemy ich sterowania.
Pomiar obrotów w czasie rzeczywistym
Aplikacją, która jest wymagająca dla czujników obrotów SAW, jest pomiar obrotów w układzie napędowym z automatyczną skrzynią biegów. W tym przypadku konieczne jest zastosowanie czujników pozwalających na pomiar obrotów co kilka milisekund lub częściej. Czujniki te umieszczane są w jednym lub dwóch krytycznych miejscach napędu – na osi wejściowej oraz wyjściowej. Mając informację o obrotach w czasie rzeczywistym układ sterujący może zapewnić odpowiednie zmiany biegów, a przez to łagodną pracę napędu. Jednocześnie problemem przestają być opóźnienia czasowe w układzie, które wiązały się wcześniej z transmisją i przetwarzaniem danych np. z czujników ciśnienia.
Warto dodać, że systemy napędowe są aplikacjami wymagającymi stosowania czujników odpornych na skrajne warunki pracy. Wiele z nich wykorzystywanych jest na zewnątrz elementów układu napędowego, ale też zanurzonych może być w oleju, np. w pobliżu obracających się elementów. W przypadku czujników wykorzystywanych wewnątrz układu napędowego, warunki ich pracy są zwykle analogiczne do tych, na które wystawione są elementy przekładnie i inne elementy układu. Oznacza to, że w niektórych przypadkach muszą one pracować w temperaturach od –40°C do 150°C, wytrzymując wibracje i udary, narażenia mechaniczne, zmiany wilgotności, jak też móc pracować w środowiskach wybuchowych. Dzięki wykorzystaniu bezprzewodowego przesyłu informacji o obrotach czujniki SAW z pewnością łatwiej spełniać mogą powyższe wymagania, niż ich klasyczne odpowiedniki.
Podsumowanie
Bezprzewodowe czujniki obrotów bazujące na wykorzystaniu technologii z falą powierzchniową rozwijane są od około 10 lat i stanowią obiecującą technologię, która może być wykorzystana w wielu aplikacjach, m.in. układach napędowych samochodów. Zapewniają one dokładny pomiar obrotów, a przy tym są trwałe, dzięki czemu stanowią alternatywę dla tradycyjnych metod pomiarowych stosowanych dotychczas omawianych aplikacjach.
Zbigniew Piątek
Artykuł redakcyjny na bazie materiałów firmy Honeywell.










