
Oprogramowanie integruje programowanie PLC z tworzeniem projektów na SIMATIC HMI – teraz w jednym projekcie mogą znaleźć się zarówno sterowniki, jak i panele operatorskie. Pozwala ono też na swobodne przenoszenie zmiennych pomiędzy projektowanymi urządzeniami. Wszystko odbywa się w ramach jednej bazy danych projektowych, dzięki czemu można uniknąć powstawania wielu błędów w aplikacjach.
WSPÓŁPRACA Z SERWONAPĘDAMI
 W ramach omawianej platformy systematycznie udostępniane są nowe funkcjonalności oraz przykłady zastosowania nowych opcji w praktyce. W artykule zostały przedstawione możliwości połączenia nowego sterownika SIMATIC S7-1200 z napędami serwo, z wykorzystaniem z wyjścia impulsowego PTO w sterowniku.
W ramach omawianej platformy systematycznie udostępniane są nowe funkcjonalności oraz przykłady zastosowania nowych opcji w praktyce. W artykule zostały przedstawione możliwości połączenia nowego sterownika SIMATIC S7-1200 z napędami serwo, z wykorzystaniem z wyjścia impulsowego PTO w sterowniku.
Niedawno wydana aktualizacja firmware napędów serwo SINAMICS S110 udostępnia w nich interfejs impulsowy, dzięki czemu mogą być one stosowane tak jak w opisywanej aplikacji. Drugą możliwością połączenia omawianych nanapędów serwo ze sterownikiem S7-1200 jest skorzystanie z możliwości protokołu komunikacyjnego USS, przy czym ten sposób nie został opisany w bieżącym artykule.
SCHEMAT APLIKACJI
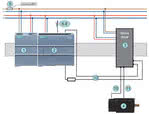
Rys. 1 Ideowy schemat połączeń
Ideowy schemat połączenia urządzeń pokazany jest na rys. 1. Sterownik (2) zasilany jest z zasilacza 24VDC (1) i wysyła impulsy sterujące bezpośrednio do serwonapędu (3), który lokalnie, w pętli zamkniętej steruje silnikiem synchronicznym z enkoderem (4). Informacja o osiągniętej pozycji jest przesyłana z serwonapędu do wejścia sterownika S7-1200.
Kolejne rysunki dokładniej przedstawiają dostępne sygnały wejściowe oraz wyjściowe. Na rysunku 2a zademonstrowano sposób połączenia od strony sterownika PLC. Oprócz wyjścia impulsowego sterującego aktualną pozycją, oddzielnym wyjściem podawana jest informacja o kierunku ruchu.
Dostępne są również dodatkowe linie sygnałowe związane z obsługą pracy napędu. Na rysunku 3b przedstawiono z kolei sygnały dostępne od strony napędu oraz połączenie z silnikiem synchronicznym. W zależności od wybranego rozwiązania serwo, niektóre elementy mogą różnić się w praktyce.
UTWORZENIE PROGRAMU

Rys. 2 Sygnały dostępne od strony sterownika i serwonapędu
Po odpowiednim dobraniu i skonfigurowaniu urządzeń można przystąpić do przygotowania programu, który wgrany zostanie do sterownika PLC. Uruchamiając oprogramowanie Step7 Basic, wybieramy nowy projekt i dodajemy nowy sterownik. Jeżeli z listy dostępnych urządzeń wybierzemy „Unspecific CPU”, w kolejnym kroku będziemy mieli możliwość dokonania automatycznej detekcji urządzenia poprzez sieć Ethernet.
Po przeprowadzeniu poprawnej detekcji PLC w oknie „Device configuration” powinien pojawić się SIMATIC S7-1200 oznaczony tym samym numerem katalogowym co sterownik podłączony do komputera. Od tego momentu można przystąpić do pisania programu.

Rys. 4 Okno kreatora
W oknie „Project tree” rozwijamy zakładkę z naszym sterownikiem, a następnie dodajemy nowy obiekt technologiczny (zakładka „Technological Objects”). Następnie otwiera się nowe okno kreatora (rys. 3).
Po lewej stronie okna należy zaznaczyć oś (Axis) i kliknąć OK. W oknie konfiguratora wprowadzamy wszystkie istotne dane. Na początku należy aktywować w konfiguracji sprzętowej sterownika wyjście PTO. Można to sprawnie wykonać, klikając z poziomu kreatora „Device configuration”. Następnie w kolejnych krokach należy wprowadzić takie parametry, jak używane jednostki długości, używane sygnały wejściowe/wyjściowe (zależy od konfiguracji serwo napędu), podać liczbę impulsów na obrót wałka silnika, maksymalną prędkość, przyspieszenie, limity, itp.

Rys. 3.Widok utworzonego programu
Jeżeli zdefiniujemy parametry, wszystkie zakładki kreatora zostaną odznaczone na zielono. Gdy przejdziemy do tworzenia logiki programu w edytorze LAD lub FBD, dane przygotowane przez kreatora zapisane zostają w bazie projektu. Teraz wystarczy tylko wybrać odpowiedni blok z okna „Extended instructions –> Motion Control” i wstawić go do programu (rys. 4). Na uwagę zasługuje fakt, że wszystkie predefiniowane bloki, które używane są w projekcie dla SIMATIC S7-1200, spełniają wymagania zgodności organizacji PLCopen dla Motion Control, która wyznacza standardy wydajnego i standaryzowanego programowania sterowników PLC.
WIĘCEJ INFORMACJI
Dodatkowe informacje znaleźć można na stronie internetowej www.siemens.pl/S7-1200 pod zakładką „Przykłady aplikacji”. Umieszczony jest tam kompletny opis aplikacji wraz z gotowym programem sterownika oraz wizualizacją dla panelu operatorskiego.
Mirosław Kuligowski
Kierownik Produktu
miroslaw.kuligowski@siemens.com










