Rys. 1. Wnętrze urządzenia pomiarowego do badania profi lu i jakości powierzchni dachówek
Wobit dostarcza silniki krokowe, stopnie mocy, układy sterujące, czujniki i narzędzia do szybkiego projektowania złożonych konstrukcji maszyn pomiarowych i technologicznych, dzieląc się z klientem wiedzą na temat działania poszczególnych komponentów i samego projektowania. Dopiero w oparciu o niuanse danej aplikacji i poprawne zdefiniowanie wymogów co do precyzji pomiaru, można doradzić wybór jednej z kilkunastu technologii pomiarowych czujników przemieszczeń liniowych, biorąc pod uwagę posiadane zasoby finansowe.
Często na ostateczny wybór napędu i techniki liniowej budowanego urządzenia wpływa kompromis pomiędzy ceną i np. szybkością pomiaru. Dla projektanta kuszące jest użycie najwyższej jakości napędu, np. serwosilników i najwyższej precyzji techniki liniowej, tj. szlifowanej śruby kulowej, a nawet łożyskowania powietrznego. Czy jednak zawsze jest to uzasadnione?
MASZYNA POMIAROWA DO BADANIA DACHÓWEK

Rys. 2. Plamka pomiarowa czujnika laserowego na powierzchni dachówki
Na rysunku 1 pokazano urządzenie pomiarowe zrealizowane w tradycyjny sposób przez specjalistyczną firmę, na zakup którego pozwolić sobie może odpowiedniej wielkości koncern. Użyto serwonapędów, odpowiedniej techniki liniowej i szeregu komponentów składających się na konstrukcję napędu z 3 osiami ruchu liniowego i obrotową głowicą. Do badania profilu dachówki i jakości powierzchni zastosowano szybki dalmierz laserowy optoNCDT ILD1800-50 firmy Micro-Epsilon.
Rozdzielczość poniżej 3μm, liniowość czujnika lepsza niż 60μm i możliwość wykonania ponad 5000 pomiarów na sekundę pozwalają na szybki i pewny pomiar profilu i jakości powierzchni dachówki. Pozycja czujnika laserowego jest modyfikowana odpowiednio przy pomiarze powierzchni dla uzyskania małej plamki pomiarowej. Podobne urządzenie można jednak zrealizować znacznie taniej przy użyciu czujników, komponentów i modułów liniowych oferowanych wraz z doradztwem przez firmę Wobit.
Rys. 3. Układ scalony kontrolera ruchu TMC428
Szkic trójwymiarowej konstrukcji przedstawia rysunek 13. Zastosowano tutaj komponenty i rozwiązania o rząd tańsze, a modularną konstrukcję mechaniczną wykonać można w każdym warsztacie. Zamiast serwonapędów do napędu użyto silników krokowych, które zadowalająco wykonują zadania pozycjonowania urządzeń pomiarowych pod warunkiem właściwego zarządzania ruchem lub jeśli użyty zostanie odpowiedniej jakości czujnik – np. szybki dalmierz laserowy.
Sterowanie silnika krokowego za pomocą elektronicznego układu jest zadaniem stosunkowo łatwym dla każdego elektronika, jednak zbudowanie układu zarządzającego ruchem silnika krokowego elastycznie programowalnego, nietolerującego nagłych przeskoków czy przerw czasowych, zapewniającego dobrą dynamikę sterowania silnika krokowego przy jednocześnie wysokiej precyzji i płynności ruchu, jest zadaniem dużo trudniejszym.
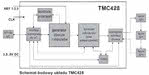
Rys. 4. Schemat blokowy kontrolera ruchu TMC428
Do jego realizacji warto wykorzystać wiedzę fachowców i stosowne układy scalone w przypadku podejmowania produkcji ilościowej lub gotowe specjalistyczne urządzenia sterujące w przypadku pojedynczych zastosowań. W budowę pojedynczych stanowisk pomiarowych łatwiej jest zaangażować kompletny zestaw napędowy spełniający zgłoszone wymagania, szczególnie gdy jednocześnie do kompletu oferowane są odpowiednie rozwiązania liniowe rozwiązujące problem precyzyjnego poruszania głowicy pomiarowej lub mierzonego detalu.
UKŁADY SCALONE DO KONTROLI RUCHU SILNIKÓW KROKOWYCH

Rys. 5. Przykładowe otoczenie mikroindeksera MI1.8.8
W przypadku budowy urządzeń seryjnych warto sięgnąć po specjalizowane układy scalone realizujące funkcje kontroli ruchu. Scalony kontroler TMC428 rewolucjonizuje budowę układów kontroli ruchu silników krokowych w układach od jedno- do trzyosiowych. Krytyczne czasowo zadania związane z generowaniem profilu trajektorii ruchu integruje w pojedynczym chipie.
Zawiera adaptacyjny sekwencer mikrokroku z pamięcią RAM mieszczącą tabelę mikrokroku oraz obsługuje przełącznik referencyjny i stopu, umożliwiając precyzyjne i szybkie odnajdywanie bazy oraz sprawdzanie w locie pozycji. Automatyczna kontrola prądu zapewnia oszczędność energii przy dużej dynamice napędu. Wyjście przerwań generuje precyzyjne impulsy pozycji. TMC428 można podłączyć bezpośrednio do układów sterujących z wejściem SPI lub klasycznym krok/kierunek (CLK/DIR).

Rys. 6. Przykładowe okno programu WINMI
Drugi interfejs SPI pozwala na komunikację z procesorem zarządzającym. Mikrokontroler zarządzający musi tylko obsługiwać zadania wyższego rzędu, jak podawanie komend „jedź silnikiem nr 2 na pozycję 1000”. Układ TMC428 automatycznie kalkuluje rampę ruchu, bazując na wartościach prędkości i przyspieszenia. Został on wykonany w technologii CMOS 0,35μm i jest dostarczany w obudowach SOP24 i SSOP16. Jego funkcjonalność można poszerzyć o obsługę enkodera za pomocą układu TMC423. Został on użyty do budowy produkowanych przez Wobit indekserów, przy wykorzystaniu których nie jest potrzebna wiedza programistyczna ani konstruktorska.
MIKROINDEKSER DO ZARZĄDZANIA PRACĄ SILNIKA KROKOWEGO

Rys. 7. Typowe konfi guracje kinematyczne napędzane silnikiem krokowym i sterowane indekserem MI1.8.8
W przypadku budowy pojedynczego stanowiska pomiarowego do zarządzania ruchem silnika krokowego i potrzeby wykonania dodatkowych zadań z kompetencji sterownika PLC, świetnym rozwiązaniem jest mikroindekser MI1.8.8, będący uniwersalnym urządzeniem do zadawania trajektorii ruchu i pozycjonowania na obiekcie za pośrednictwem sterownika silnika krokowego.

Rys. 8. Przykładowe otoczenie mikroindeksera
Wykorzystuje on program sterujący WINMI instalowany na komputerze PC, z którym komunikuje się za pomocą łącza RS232. Zadanie budowy trajektorii ruchu dla silnika krokowego jest trudne dla zwykłego programowalnego sterownika PLC. Realizują to dobrze dopiero sterowniki wyposażone w relatywnie drogi moduł obsługi silnika krokowego.
Indekser wykorzystuje natomiast układ kontrolera ruchu TMC428 firmy Trinamic do sprzętowego generowania trajektorii ruchu, udostępniając jednocześnie kilka wejść i wyjść wraz z funkcjami typowymi dla małych sterowników PLC. Programowanie mikroindeksera jest stosunkowo łatwe dzięki gotowym funkcjom, np. „znajdź home” (pozycję bazową), „skocz, jeśli wejście” (uzależnienie przebiegu programu od stanu określonego wejścia), itp.
Układanie programu może następować stopniowo, wraz z postępem przećwiczonych zadań i jest zadaniem łatwym dla każdego elektryka lub automatyka. Rysunek 6 pokazuje przykładowy zrzut ekranu z programu WINMI dostarczonego wraz z indekserem. Przy małym koszcie mikroindeksera z oprogramowaniem (cena 260 zł netto), sterownika i silnika, mogą być obsłużone zadania pozycjonowania wg podanych poniżej przykładowych konfiguracji napędów z silnikiem krokowym, których cena jest ułamkiem kwoty niezbędnej do wykonania napędu z bardziej zaawansowanym silnikiem i sterowaniem (w wielu wypadkach przy spełnieniu wszystkich założeń co do precyzji i prędkości ruchu).
MIKROINDEKSER 3-OSIOWY
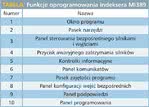
Tabela. Funkcje oprogramowania indeksera MI389
Przy konstruowaniu urządzeń wieloosiowych przydatny jest trzyosiowy indekser MI389 przeznaczony do kontroli ruchu trzech napędów krokowych z dowolnymi sterownikami mocy. Cykliczne wykonywanie skomplikowanych i powtarzalnych sekwencji ruchów o wielu parametrach (np.: pozycja, prędkość) z rozpędzaniem i kontrolowanym zatrzymaniem silnika pomoże łatwo skonfigurować oprogramowanie MI389-PC, komunikujące się poprzez łącze USB.
Zadania i otoczenie mikroindeksera ilustruje rysunek 8. Proste i intuicyjne zaprogramowanie trajektorii ruchu dla 3 silników krokowych jest kwestią kilku chwil nawet dla użytkownika nieposiadającego doświadczenia. Program umożliwia również podgląd aktualnych parametrów silników i stanów wejść/wyjść oraz sterowanie w czasie rzeczywistym. Widok ekranu do komunikacji z użytkownikiem pokazuje rysunek 9. Po zaprogramowaniu urządzenie może działać niezależnie, nawet bez łączności z komputerem osobistym. Właściwości indeksera MI389:

Rys. 9. Widok ekranu oprogramowania indeksera MI389
- współpraca ze sterownikami silników krokowych (wyjścia CLK i DIR dla każdego ze sterowników oraz wspólne wyjście Enable w standardzie TTL),
- 2 optoizolowane wejścia specjalizowane Run i Stop,
- 6 optoizolowanych wejść ogólnego przeznaczenia,
- 3 × 2 wejścia czujników krańcowych,
- 2 wyjścia przekaźnikowe, 7 wyjść tranzystorowych typu OC,
- wskaźniki LED sygnalizujące zasilanie oraz tryby pracy,
- nieulotna pamięć programu (maksymalnie 999 komend),
- transmisja USB,
- zasilanie i sygnały sterujące na listwach rozłącznych ze złączami śrubowymi,
- obudowa przystosowana do montażu na szynie DIN,
- zasilanie 10…25VDC,
- możliwość zasilania z portu USB.
KONSTRUKCJE WIELOOSIOWE Z WYKORZYSTANIEM MODUŁÓW LINIOWYCH

Rys. 10. Przykładowa konstrukcja urządzenia pomiarowego z napędami krokowymi
Mikroindekser MI389 jest w stanie całkowicie obsłużyć bardziej skomplikowane zadanie, niż wymaga tego urządzenie pomiarowe o konstrukcji z profili aluminiowych pokazanej na rysunku 10. W tym przypadku stała brama z zainstalowanymi czujnikami laserowymi skanuje wjeżdżający na dwóch modułach liniowych mierzony detal.
Impulsy zegarowe do sterownika stanowią jednocześnie siatkę pomiarową do odniesienia zmierzonych wartości z triangulacyjnych czujników laserowych. Wszystkie te sygnały mogą być obsłużone przez kartę pomiarową IF2004 współpracującą z czujnikami laserowymi ILD2200-50. Dzięki intuicyjnemu oprogramowaniu MI389-PC, zaprogramowanie poruszania detalu dla uzyskania odpowiednich przebiegów pomiarowych jest łatwym zadaniem, niewymagającym wiedzy programistycznej.
Również na bazie modułów osi liniowej zaprojektowana maszyna 3-osiowa wykorzystuje indekser do zarządzania ruchem czujnika w trzech płaszczyznach. Podłączony do pionowej osi liniowej laserowy skaner 2D (model Scancontrol2700-100 firmy Micro-Epsilon) może skanować przedmioty na linii produkcyjnej, dostarczając informacji o poprawności wymiarów detali z prędkością 64 tys. punktów na sekundę. Skaner mierzy bezstykowo w zakresie 100mm z rozdzielczością do 15μm, analizując aż 640 punktów na profil przy liniowości ±0,2% zakresu.

Rys. 11. Konstrukcja trzyosiowej maszyny pomiarowej zbudowanej z modułów MLA
Zarządzający maszyną pomiarową komputer PC zwolniony jest praktycznie z zadań pozycjonowania, wyznaczając tylko realizację zaprogramowanych wcześniej sekwencji ruchu w indekserze, dzięki czemu może się zająć analizą danych pomiarowych ze skanera. Jak łatwo zrealizować projekt podobnej maszyny w układzie kartezjańskim, warto się przekonać, wchodząc na stronę firmy Wobit i korzystając z konfiguratora osi liniowej.
Odpowiadając interaktywnie na pytania konfiguratora, w efekcie otrzymuje się gotowy projekt konstrukcji, włącznie z rysunkiem w uniwersalnym formacie STEP i wykazem wszystkich użytych komponentów dostępnych w Wobicie. W ten sposób niezwykle szybko można nie tylko zaimponować końcowemu odbiorcy, pokazując symulację graficzną wyglądu maszyny, ale też poznać wszystkie koszty związane z przygotowaniem planowanego rozwiązania.
W chwili obecnej moduły liniowe MLA zawierają zintegrowane sterowniki silników krokowych oczekujące impulsów kroku i sygnałów kierunku, generowanych przez opisane mikroindeksery. Docelowo również zarządzanie ruchem będzie zintegrowane w inteligentnych osiach 
Rys. 12. Maszyna pomiarowa do określania profi lu dachówek