
Główne klasyfikacje robotów mobilnych to Autonomiczne Roboty Mobilne (Autonomous Mobile Robots - AMR) oraz pojazdy z automatycznym prowadzeniem (Automated Guided Vehicles - AGV). Na rynku istnieje wiele rodzajów autonomicznych i półautonomicznych robotów mobilnych. Niezależnie od konkretnego poziomu autonomii, roboty mobilne są zasadniczo przeznaczone do przewożenia materiałów z jednego miejsca do drugiego.
Sercem ruchu robota są silniki elektryczne, które napędzają koła robota i odpowiedzialne są za ruch w przód i do tyłu, jak również do kierowania. Silniki elektryczne używane są również do osi odpowiedzialnych za obsługę materiałów jak np. podnoszenie, zaciskanie, obracanie i załadunek.
Roboty mobilne często zawierają szczotkowe silniki DC lub nawet indukcyjne silniki AC, głównie ze względu na ich niski koszt. Jednak biorąc pod uwagę gęstość momentu obrotowego, wydajność, regulację prędkości, długą żywotność, głośność pracy i płynność ruchu nic nie może konkurować z bezszczotkowym silnikiem serwo. Serwosilniki bezszczotkowe DC zapewniają znacznie dokładniejszą kontrolę prędkości i pozycjonowania niż silniki indukcyjne AC. Brak szczotek, które się zużywają, zapewnia bezobsługową pracę przez wiele lat.
Zintegrowane serwonapędy bezszczotkowe
Zintegrowany serwomotor to odmiana serwosilnika bezszczotkowego, który zyskuje popularność w aplikacjach robotów mobilnych ze względu na mniejsze zapotrzebowanie na miejsce i oszczędność kosztów. Zintegrowane serwonapędy łączą w sobie bezszczotkowy silnik serwo i elektroniczny sterownik silnika (zawiera sterownik lub wzmacniacz) w jednej obudowie, aby zaoszczędzić miejsce i wyeliminować okablowanie.
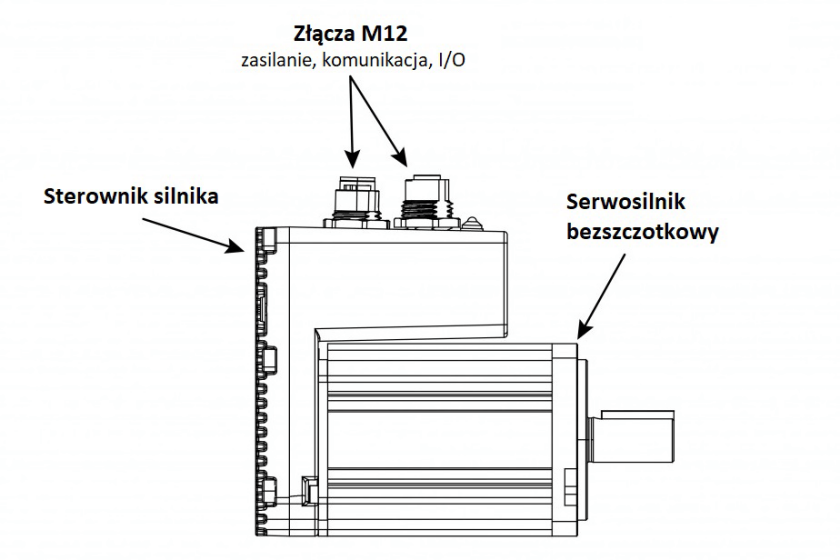
Zintegrowany serwomotor zwykle mieści elektronikę sterującą z tyłu silnika, w pobliżu sprzężenia zwrotnego i/lub wzdłuż jednej strony silnika. Złącza zasilania, komunikacji i wejść/wyjść również są umieszczone w pobliżu tyłu lub boku silnika, zwykle zgrupowane na jednej powierzchni. Nie jest wymagana żadna dodatkowa elektronika do napędu lub sterowania silnikiem. Sygnały sterujące z centralnego układu sterowania robota można podłączyć bezpośrednio do zintegrowanego serwosilnika.
Połączenie silnika serwo i sterownika w jeden zintegrowany pakiet eliminuje potrzebę montażu zewnętrznego sterownika silnika w korpusie robota mobilnego, oszczędzając cenną przestrzeń i zmniejszając rozmiar robota. Zabudowa sterownika silnika bezpośrednio na korpusie silnika eliminuje również potrzebę użycia kabli zasilających i sprzężenia zwrotnego, które normalnie służą do podłączenia silnika serwo do zewnętrznego sterownika silnika.
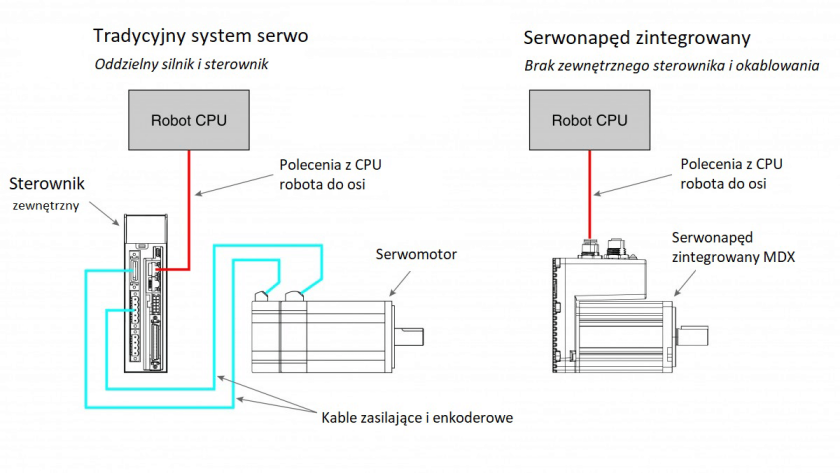
W zależności od silnika serwo, kable mogą być dość masywne. Wyeliminowanie tych kabli uwalnia dodatkową przestrzeń w robocie, dzięki czemu można pomieścić inne mechanizmy, czujniki lub elementy interfejsu operatora. Rysunek 2 pokazuje oszczędność miejsca zintegrowanego serwomotoru w porównaniu z tradycyjnym serwonapędem z oddzielnymi komponentami silnika i sterownika.
Mniej komponentów = zredukowane koszty
Cykl projektowania robota wymaga dopasowania różnych silników elektrycznych, siłowników do funkcji przenoszenia materiałów i innych komponentów systemu w ściśle określoną i ograniczoną przestrzeń. Wyeliminowanie zewnętrznego sterownika z listy materiałów pozwala zaoszczędzić miejsce i pieniądze, gdyż zintegrowana elektronika sterująca jest zwykle tańsza niż zewnętrzne sterowniki silników. Nie musimy również obawiać się o odpowiednie rozmieszczenie komponentów w robocie, gdyż zintegrowany serwonapęd MDX został zoptymalizowany pod kątem jak najlepszego wykorzystania przestrzeni w stosunku do mocy.
Projektanci robotów mogą w mniejszym stopniu skupić się na sterowniku silnika, a więcej na elementach systemu innych niż silnik. Ta logika dotyczy zarówno osi napędowych, jak i osi odpowiedzialnych za udźwig, itp. , ponieważ projektanci mogą zdecydować się na zastosowanie zintegrowanych silników w całym robocie, realizując korzyści wynikające z oszczędności miejsca i pieniędzy na wszystkich osiach robota.
Wiele opcji interfejsu
Interfejsy elektryczne w zintegrowanym serwosilniku MDX wymagają tylko trzech typów sygnałów:
- Zasilanie prądem stałym z akumulatora (lub zasilacza)
- Sygnały komend z jednostki centralnej robota,
- Sygnały I/O (w razie potrzeby)
Lokalne punkty I/O w serwonapędach MDX są dostępne kiedy projektant preferuje podłączenie sygnałów dyskretnych bezpośrednio do zintegrowanego serwonapędu zamiast do CPU robota. Przykłady obejmują m.in. podłączenie sygnału zezwolenia (Enable), czujniki krańcowe lub obwody e-stop. Wyjścia cyfrowe z serwosilnika MDX mogą zasilać lampki kontrolne lub inne urządzenia interfejsu operatora. Cyfrowe wejścia/wyjścia na silniku nie są wymagane dla każdego projektu robota, ale są dostępne, jeśli zajdzie taka potrzeba.
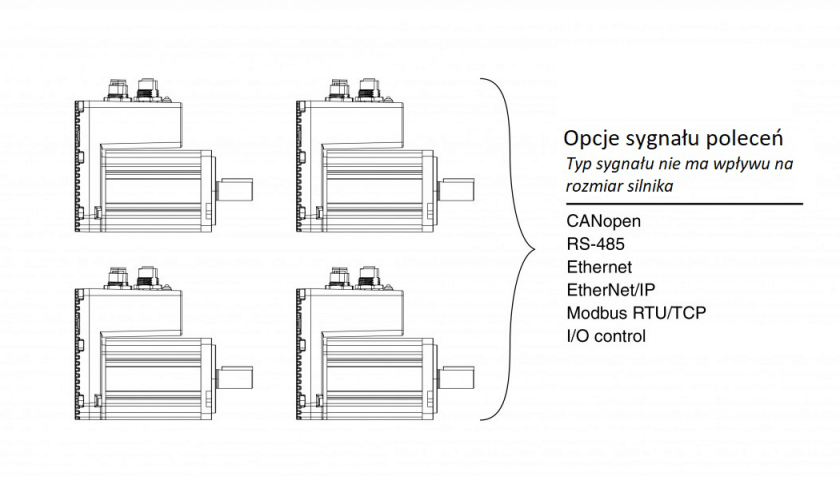
Wbudowany sterownik w zintegrowanym serwosilniku MDX ma takie same interfejsy komunikacyjne jak zewnętrzny sterownik silnika, w tym połączenia CANopen, RS-485, Modbus i Ethernet, a także dyskretne interfejsy I/O jak krok i kierunek. Rysunek 3 przedstawia różne opcje sygnału sterującego dostępne w zintegrowanym silniku serwo serii MDX.
Zastosowanie zintegrowanych serwosilników MDX przynosi wiele korzyści projektantom robotów w wielu obszarach, m.in. zmniejszając liczbę elementów w systemie, eliminując użycie wielu kabli lub wiązek kablowych, uwalniają cenną przestrzeń w obudowie robota, upraszczają zestawienie materiałów, skracają cykl projektowania robota i pozwalają na spore oszczędności czasu i pieniędzy.
Kompaktowe serwosilniki zintegrowane MDX marki MOONS’
Serwonapędy zintegrowane serii MDX to jedne z najbardziej kompaktowych serwosilników zintegrowanych na rynku. Zaprojektowane zostały z myślą o wymagających aplikacjach mobilnych (jak np. roboty mobilne AGV, czy maszyny rolnicze), aplikacjach wymagających napięć bezpiecznych (urządzenia medyczne i laboratoryjne) oraz długich liniach technologicznych, w których dużo lepszym rozwiązaniem są systemy zdecentralizowane. Silniki są o 20% krótsze w porównaniu do standardowych silników serwo - ale przy zachowaniu takich samych parametrów technicznych jak moment, prędkość obrotowa i moc. Silniki charakteryzują się ponadto bardzo dużą dynamiką dzięki obniżonemu momentowi bezwładności.
Serwonapędy serii MDX to rozwiązanie all-in-one, składające się z silnika bezszczotkowego, enkodera inkrementalnego dużej rozdzielczości i zabudowanego na silniku serwowzmacniacza. Występują w dwóch wariantach mocy 200 W i 400 W oraz w wykonaniu IP20 lub IP65. Serwonapędy MDX mogą być zasilane napięciem stałym w zakresie od 24-60 VDC (rekomendowane 48 VDC). Wspierają komunikację sieciową RS-485 (Modbus/RTU) oraz CANopen (CiA 301 i CiA 402). Mogą pracować w trybie pozycyjnym, prędkościowym lub momentowym.
Do dyspozycji użytkownika jest 8 wejść cyfrowych z czego 5 optoizolowanych i dwa szybkie różnicowe z obsługą sygnału do 2 MHz, 4 wyjścia cyfrowe optoizolowane i 2 wejścia analogowe. Silniki mogą być wyposażone w enkodery inkrementalne magnetyczne o rozdzielczości 16-bit lub 4096 imp/obr.
Na szczególną uwagę zasługuje Qprogrammer - wbudowany programowalny sterownik ruchu, dzięki któremu użytkownik może napisać program obsługi bezpośrednio w silniku, wykorzystując m.in. operacje matematyczne, operacje logiczne, operacje na rejestrach, komendy obsługi wejść/wyjść, komendy kontroli ruchu, itd. Pozwala to na odciążenie sterownika PLC (wystarczy poprzez sieć wywoływać procedury ruchu) lub nawet na całkowitą rezygnację z jego zastosowania! Program zapisywany jest w nieulotnej pamięci sterownika i może być wyzwalany poprzez sygnały I/O lub komunikację sieciową.
Do programowania i parametryzacji napędów MDX służy intuicyjne i przyjazne dla użytkownika oprogramowanie MDX Quick Tuner.
















