
Po podłączeniu silnika do zasilania prąd płynący w stojanie wytwarza wirujące pole magnetyczne, które indukuje prąd w uzwojeniach wirnika. Na skutek jego przepływu także wytwarzane jest pole magnetyczne. W rezultacie wzajemnego oddziaływania na siebie pól stojana i wirnika wytwarzany jest moment obrotowy, a wirnik się obraca.
Rozpędza się on, aż osiągnie prędkość zbliżoną do prędkości synchronicznej, czyli prędkości pola wirującego generowanego przez stojan. W silnikach asynchronicznych (indukcyjnych) wirnik nie osiąga prędkości synchronicznej, gdyż uniemożliwiłoby to indukowanie w nim prądu, a silnik nie wytwarzałby momentu obrotowego. Różnica między rzeczywistą prędkością obrotową wirnika, a prędkością synchroniczną jest wyrażana jako poślizg, obliczany z następującej zależności:
gdzie ns to prędkość synchroniczna, a n rzeczywista prędkość obrotowa wirnika. Jeżeli silnik jest nieruchomy, poślizg wynosi 1. W czasie normalnej pracy wartość poślizgu zależy od obciążenia, ale przeważnie wynosi od około 0,05 do zaledwie 0,01 dla silników odpowiednio małej i dużej mocy.
Jak się zmienia prąd rozruchowy?
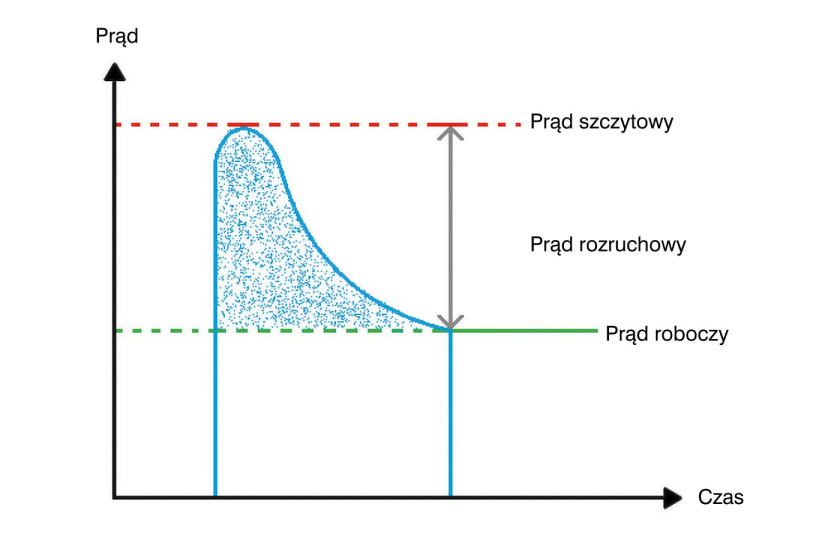
Podczas rozruchu poślizg jest bliski 1 i to pozwala na pobór dużego prądu. Gdy wirnik przyspiesza, poślizg maleje, zaś prąd spada do wartości znamionowej. Natężenie prądu rozruchowego zależy od typu silnika i metody jego rozruchu. Największą wartość ma w pierwszej połowie cyklu pracy, gdy może przekraczać nawet 10-krotność prądu roboczego. Szczytowy prąd rozruchowy, płynący zaraz po zamknięciu styków, jest przejściowy. Następnie w czasie przyspieszania silnika natężenie prądu utrzymuje wartość od sześciu do ośmiu razy większą niż prąd roboczy. Wraz ze zwiększaniem się prędkości obrotowej prąd rozruchowy maleje, aż do osiągnięcia prędkości roboczej, gdy stabilizuje się na wartości znamionowej.
Rozpiętość prądu startowego od 6- do 10-krotności prądu roboczego jest typowa dla standardowych silników przemysłowych. Ponieważ jednak na natężenie prądu pobieranego przez silnik podczas uruchamiania ma także wpływ rezystancja uzwojeń stojana, w silnikach energooszczędnych, w których, w celu ograniczenia strat na ciepło zmniejsza się rezystancję uzwojeń, prąd rozruchowy może być jeszcze większy.
Ponadto na prąd rozruchowy mają wpływ: obciążenie silnika i charakterystyka układu jego zasilania. Silnie obciążony silnik będzie pobierał prąd rozruchowy przez dłuższy czas niż ten z mniejszym obciążeniem. Podobnie, jeżeli napięcie zasilania jest małe, czas rozruchu silnika jest dłuższy, a więc wydłuża się też czas pobierania prądu rozruchowego. Zwiększa to prawdopodobieństwo nasilenia się jego niekorzystnych konsekwencji.
Jakie są skutki prądu startowego? Jak go mierzyć?
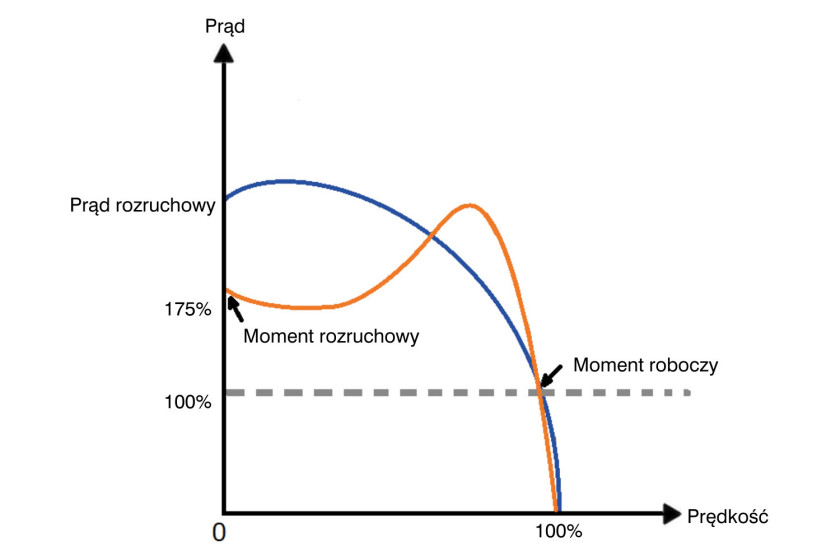
Takimi są uciążliwe załączenia komponentów zabezpieczających silnik lub jego uszkodzenie. Duży prąd startowy skutkuje również wytworzeniem dużego momentu obrotowego w czasie rozruchu – czasem może to być nawet kilkakrotność momentu znamionowego. To powoduje nagłe i silne przyspieszenie, które może uszkodzić napędzane obciążenia mechaniczne.
Częściej jednak duży prąd rozruchowy, powodując znaczący spadek napięcia w sieci zasilającej, wywołuje anomalie w działaniu innych urządzeń do niej podłączonych, na przykład powodując wyłączenie tych wrażliwszych na wahania napięcie, jak sterowniki. Urządzenia o stałej mocy mogą natomiast w takim przypadku znacznie zwiększyć pobór prądu, żeby zrekompensować niższe napięcie, co może prowadzić do zadziałania zabezpieczeń nadprądowych. W skrajnej sytuacji spadek napięcia może być na tyle duży, że inne silniki nie będą w stanie wytworzyć momentu obrotowego wystarczającego do ich uruchomienia.
Aby mieć pewność, że przyczyną problemów jest prąd rozruchowy, trzeba go zmierzyć. W tym zakresie przestrzegać trzeba określonych zasad, aby odczyty i wnioski z nich płynące były wiarygodne.
Przede wszystkim zarejestrować trzeba odpowiednio długi przebieg, pozwalający na analizę zmienności prądu od natężenia startowego do tego w stanie ustalonym. Przeważnie również pojedynczy odczyt nie zapewni wystarczających informacji, aby rozwiązać problem. Silniki w obrębie typowej linii technologicznej są bowiem uruchamiane i wyłączane wiele razy w ciągu dnia, przy różnym obciążeniu i wahaniach napięcia zasilania, a wszystko to wpływa na prąd rozruchowy. Dlatego kompleksowa diagnostyka wymaga dłuższego monitoringu, który pozwoli wychwycić zmiany prądu rozruchowego i powiązać je z ich przyczynami – w pewnych zastosowaniach może być konieczny pomiar prądów rozruchowych silnika w całym cyklu produkcyjnym, a nawet przez kilka cykli.
Jak uniknąć problemów?
Rozwiązanie problemów, których źródłem jest prąd rozruchowy, zależy od specyfiki konkretnego zastosowania silnika. Popularne podejście to zastąpienie tradycyjnych elektromechanicznych rozruszników softstartami lub napędami o zmiennej prędkości. Zapewniają one kontrolowane przyspieszenie silnika podczas rozruchu, znacząco ograniczając prąd rozruchowy. Zmniejszają również zużycie mechaniczne silnika, jak i napędzanego przez niego obciążenie. W przypadku napędów o zmiennej prędkości dodatkową korzyścią jest zwiększenie sprawności energetycznej.
Jeśli chodzi o softstarty, zasada ich działania jest następująca: w czasie rozruchu silnika stopniowo podwyższają napięcie zasilania na jego zaciskach. Ponieważ na początku jest niskie, nie występuje gwałtowne szarpnięcie i możliwa jest płynna regulacja, przykładowo naprężenia pasów czy luzów komponentów mechanicznych. Następnie, wraz ze zwiększaniem przez softstart napięcia zasilania, rośnie moment obrotowy i silnik się rozpędza. Podobnie stopniowe zmniejszanie napięcia zasilania silnika umożliwia płynne zatrzymanie.
Taką funkcjonalność softstartów zapewniają ich główne komponenty, którymi są połączone przeciwsobnie tyrystory. Wykorzystywane są po dwa takie elementy dla każdej fazy napięcia zasilającego silnik. W czasie rozruchu tyrystory załączane są tak, by stopniowo przewodziły przez coraz większą część każdego półokresu sinusoidy napięcia zasilającego, rozpoczynając od jej fragmentu, a kończąc na 100%. Łagodne hamowanie napędu przebiega odwrotnie. Najpierw tyrystory przewodzą napięcie w 100%, a potem przepuszczają go stopniowo coraz mniej, aż do jego odłączenia.
Ważnym komponentem softstartów jest też stycznik obejściowy. Odpowiada on za odłączenie obwodów układu łagodnego rozruchu od zasilania i bezpośrednie podłączenie do niego napędzanej maszyny po jej rozpędzeniu. Przy przejściu w tryb hamowania sterownik softstartu odłącza obwód obejściowy i przełącza silnik na zasilanie za swoim pośrednictwem. Dzięki temu w czasie normalnej pracy napędu, pomiędzy rozruchem a zatrzymaniem, energia zasilająca nie jest dodatkowo tracona w obwodach softstartu.

Monika Jaworowska









