
EtherCAT to skrót od "Ethernet for Control Automation Technology". Tłumacząc wprost: Ethernet dla technologii automatyzacji sterowania. Sieć ta została opracowana specjalnie dla branży automatyki przemysłowej. EtherCAT wykorzystuje standardowe ramki oraz warstwę fizyczną Ethernetu, opisane w standardzie IEEE 802.3 – uwzględniając jednak pewne specyficzne aspekty automatyki przemysłowej, takie jak:
- szybki czas reakcji,
- minimalne wymagania urządzenia/systemu,
- koszty wdrożenia.
Jak działa sieć EtherCAT
Ethernet nie jest praktycznym rozwiązaniem w zastosowaniach przemysłowych, ponieważ kieruje ramki danych do i z ogromnej liczby oddzielnych adresów indywidualnie, a dane mogą być tak proste, jak np. pojedynczy rejestr do uzyskania analogowego odczytu w czasie rzeczywistym. Wymaga to ogromnej przepustowości, ponieważ dane są transferowane wyłącznie wtedy, gdy zażąda ich urządzenie główne/klient.
Natomiast EtherCAT wykorzystuje te same warstwy fizyczne i łącza danych co Ethernet, ale z odmiennymi protokołami. Może kierować dane przez wiele różnych węzłów w konfiguracji Master-Slave, wysyłając i odbierając w oparciu na żądaniach.
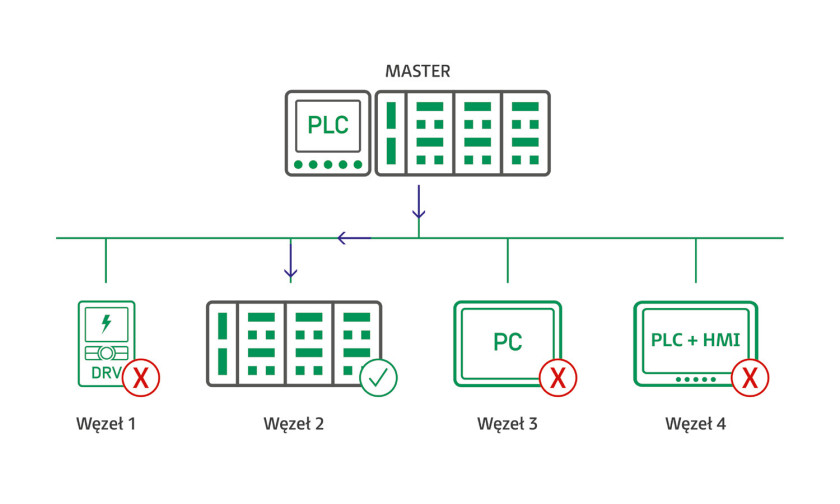
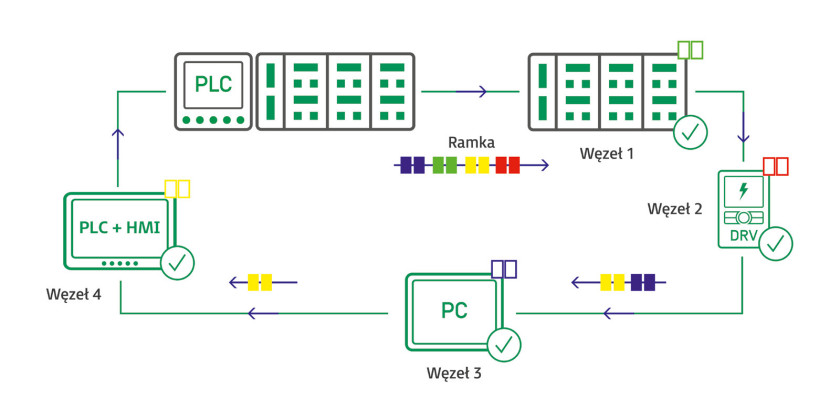
Dzięki EtherCAT urządzenie główne wysyła dane (pojedynczą ramkę) dla całej sieci węzłów i przechodzi ona przez każdy węzeł. Urządzenie typu Master jest jedynym węzłem, które może wysyłać ramki, przekazywane dalej przez każdy węzeł sieci. Takie podejście pomaga zapewnić działanie w czasie rzeczywistym i pozwala uniknąć opóźnień. Każde urządzenie EtherCAT przetwarza na bieżąco odpowiednią dla niego ramkę danych w swoim sprzęcie/oprogramowaniu i dodaje własne dane do ramki danych podczas jej przesyłania przez sieć. Żadne zewnętrzne przełączniki sieci nie są wymagane.
Każde urządzenie EtherCAT ma zazwyczaj minimum dwa porty Ethernet. Pierwszy to port odbiorczy lub kabel poprzedniego węzła, a drugi jest podłączony do następnego węzła w sieci.
Zalety sieci EtherCAT
Główną zaletą sieci EtherCAT jest przetwarzanie danych na bieżąco w sprzęcie urządzenia (tzw. praca w locie). Chociaż nadal występuje niewielkie opóźnienie w ramce danych, gdy urządzenie dodaje do niej swoje dane, jest ono znacznie zmniejszone w porównaniu z wieloma ramkami używanymi w sieci Ethernet – dzięki pojedynczemu strumieniowi danych EtherCAT.
Ta zaleta czasem może jednak okazać się również wadą. Wiele urządzeń może bowiem nie być w stanie obsłużyć tak bardzo skróconych czasów cykli, a sieć EtherCAT może wymagać spowolnienia, aby obsłużyć te urządzenia.
EtherCAT wykorzystuje również rozproszony system zegara. Metoda ta pozwala na uzyskanie niskiego poziomu tzw. jitteru bez dodatkowego sprzętu i spełnia wymogi synchronizacji wymagane w automatyce przemysłowej.
Jitter stanowi krótkookresowe odchylenie od ustalonych, okresowych charakterystyk sygnału. Jest to maksymalna różnica czasu opóźnienia między pakietami IP, przepływającymi przez łącze w określonym czasie (wyrażonym w milisekundach).
Gdy ramka EtherCAT przechodzi przez każdy węzeł, dodaje on do swoich danych znacznik czasu "odebranej wiadomości". Każdy węzeł dodaje znacznik czasu po odebraniu wiadomości, a następnie ponownie dołącza znacznik czasu, gdy ramka przemieszcza się z powrotem przez węzły w drodze powrotnej. Urządzenie typu Master ma wówczas dokładne informacje o opóźnieniu dla każdego węzła, ponieważ dane znacznika czasu są obliczane przy każdej transmisji ramki danych. Zapewnia to coraz dokładniejsze dane przy każdej transmisji danych. To również jedna z głównych zalet EtherCAT.
Topologia sieci EtherCAT
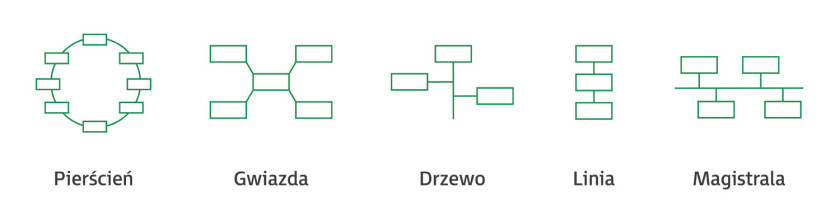
Ważną zaletą standardu EtherCAT jest możliwość stosowania wielu różnych topologii sieci. Ponieważ wykorzystywane są warstwy pełnego dupleksu Ethernet, urządzenie typu Slave EtherCAT automatycznie zwróci ramkę do Mastera po wykryciu otwartego portu w dół, co zasadniczo powoduje samozakończenie (terminację) sieci.
Możemy również zastosować topologię typu gwiazda, ale także inne, takie jak linia, drzewo itp.
EtherCAT można też stosować w systemie typu Fieldbus (Master-Slave), przy użyciu sprzętu Ethernet, wykorzystując elastyczność standardu EtherCAT. W przypadku użycia topologii pierścienia takie połączenie może również być traktowane jako system redundantny. Podłączenie drugiego portu do urządzenia głównego (gdy jest dostępny) zapewni redundancję po drugiej stronie przerwy w sieci.
Należy pamiętać o tym, aby zweryfikować praktycznie każdy typ topologii sieci, po to, by stwierdzić, które rozwiązanie będzie najlepsze do danej aplikacji.
Praktyczne zastosowanie EtherCAT w sterownikach PLC Astrada One
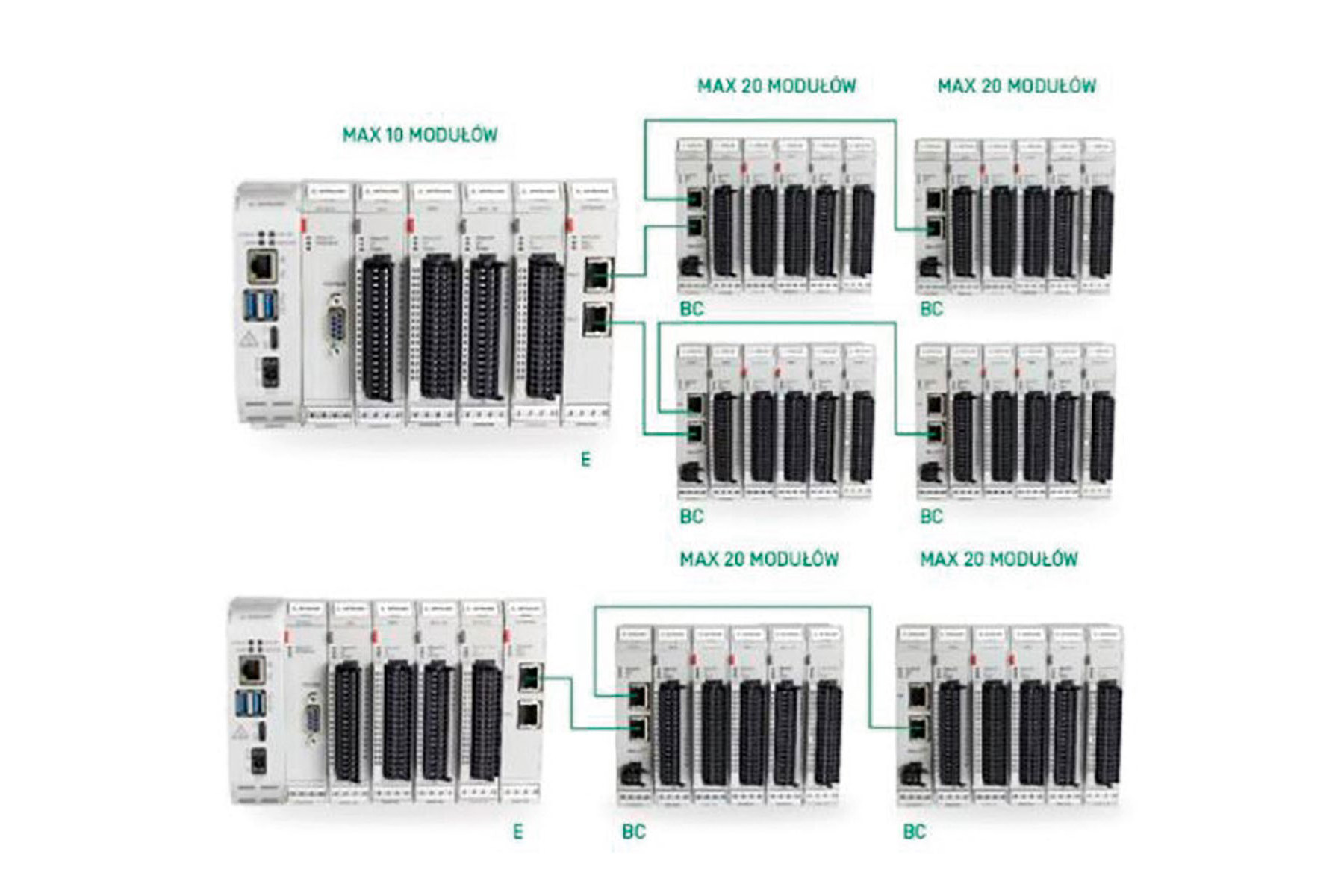
Podstawowym elementem każdego układu opartego na sterowniku PLC Astraada One jest jednostka centralna z rodziny sterowników modułowych lub kompaktowych. Do takiej jednostki możemy, w zależności od potrzeb, dołączać dodatkowe moduły I/O.
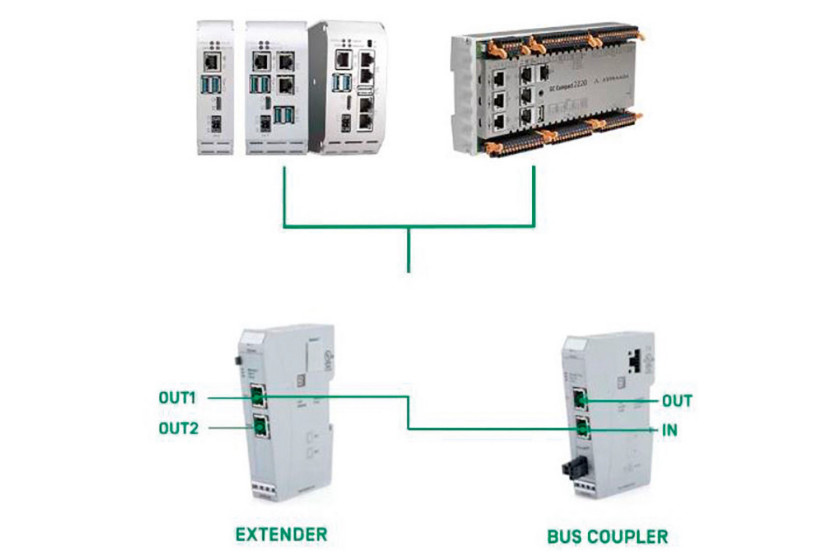
Dzięki wykorzystaniu modułów Buscoupler oraz Extender Port mamy możliwość zbudowania rozproszonych układów wejść/wyjść. Rodzinę Astraada One da się dowolnie powiększać o kolejne moduły rozszerzeń, jak również moduły kompaktowe.
Przy tworzeniu modułowej architektury sterowania należy pamiętać o dwóch zasadach:
- do jednostki centralnej można podłączyć maksymalnie 10 modułów (do dalszej rozbudowy wymagany jest moduł Extender Port);
- do modułu Buscoupler można podłączyć maksymalnie 20 modułów.
Podsumowanie
EtherCAT ma w zastosowaniach przemysłowych kilka zalet w porównaniu ze standardową siecią Ethernet. Należą do nich:
- zmniejszony ruch danych,
- obniżony koszt sprzętu do wdrożenia,
- coraz dokładniejsze dane dzięki rozproszonemu mechanizmowi zegara.
EtherCAT zyskuje coraz większą popularność wśród inżynierów zajmujących się automatyką – tych, którzy chcą mieć niezawodną i szybką sieć, działającą w czasie rzeczywistym, przeznaczoną do sterowania przemysłowego.
Mateusz Pytel Manager Produktu: Astraada One w firmie ASTOR, e-mail: mateusz.pytel@astor.com.pl
ASTOR
www.astor.com.pl










