
Roboty kartezjańskie na pierwszy rzut oka, zwłaszcza niespecjalistom, nie przypominają... robotów przemysłowych. Przez brak wyraźnych ramion i korpusu nie wpisują się bowiem w standardowe wyobrażenie na ich temat ukształtowane w powszechnej świadomości zdjęciami ilustrującymi automatyzację produkcji, przedstawiającymi ustawione rzędami roboty przegubowe skupione dookoła ramy samochodu albo roboty delta z długimi, cienkimi ramionami, którymi z dużą szybkością manipulują detalami na stanowiskach pick and place. Mimo to niewątpliwie są one jednym z powszechniej używanych typów tych maszyn w przemyśle, co zawdzięczają licznym zaletom w porównaniu z innymi.
Roboty kartezjańskie i gantry
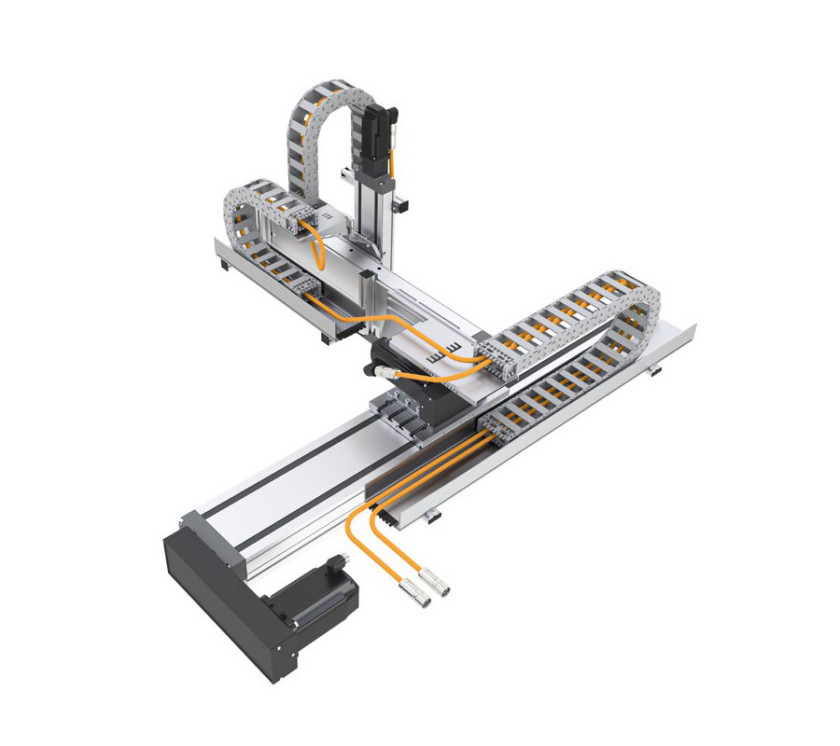
Jak sama nazwa wskazuje, tytułowe roboty związane są z układem współrzędnych kartezjańskich. Ten w przestrzeni trójwymiarowej ma trzy osie wzajemnie do siebie prostopadłe i spotykające się w jego początku, a każdy punkt reprezentują w nim trzy liczby odpowiadające jego odległości od początku wzdłuż danej osi, X, Y albo Z. Analogicznie roboty kartezjańskie mają trzy ortogonalne osie ruchu skoordynowane przez jeden kontroler. Stanowią je siłowniki liniowe, z zamocowanym na karetce na najbardziej zewnętrznej osi narzędziem, w zależności od wykonywanego zadania na przykład obrotowym ostrzem, dozownikiem albo chwytakiem. Są projektowane do poruszania się w osiach XY, XZ albo XYZ.
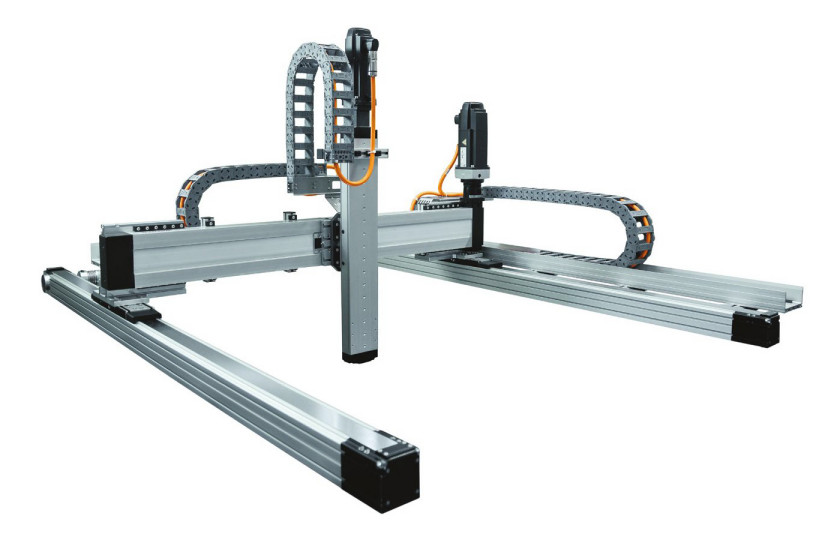
Warto zaznaczyć, że w ten ogólny opis wpisuje się podkategoria robotów kartezjańskich – roboty bramowe (suwnicowe, portalowe, gantry), od tych w wersji podstawowej różniące się konstrukcją i będącymi jej konsekwencją cechami użytkowymi. Występują one bowiem w konfiguracji 2XY lub 2XYZ, czyli z dwoma równoległymi osiami bazowymi (X). Zasadnicza różnica pomiędzy robotami kartezjańskimi a gantry polega zatem na tym, że pierwsze wykorzystują jeden siłownik liniowy na każdej osi, natomiast drugie dwa w osi X, które łączy oś Y. Taki układ zapewnia robotom gantry dłuższy skok oraz większy udźwig, w porównaniu z kartezjańskimi w wersji podstawowej.
Co wyróżnia roboty kartezjańskie?
Obszar roboczy robotów przemysłowych, który jest najłatwiejszy do "wstawienia" na stanowisko to płaszczyzna dwuwymiarowa albo trójwymiarowe "pudełko". Roboty kartezjańskie spełniają ten warunek, dzięki czemu ich wpasowanie w dostępną przestrzeń zwykle nie stwarza problemu, inaczej niż w przypadku robotów o sferycznej albo cylindrycznej obwiedni roboczej, która przez to "wystaje" poza obrys "pudełka" lub jest w nim otoczona przez dużo nieużywanego miejsca.
Obszar roboczy robotów kartezjańskich jest również łatwy do określenia i zwizualizowania. To upraszcza projekt oraz montaż osłony bezpieczeństwa. Zadanie to nie jest tak łatwe w przypadku robotów o sferycznej i cylindrycznej obwiedni roboczej. Jeżeli bowiem zdecydujemy się oddzielić je od innych stanowisk osłoną w kształcie prostokąta, trzeba ją będzie rozstawić z dużym zapasem miejsca. Ponadto to, że końcówka robocza porusza się prostoliniowo wzdłuż wzajemnie prostopadłych osi ułatwia programowanie robota, bez konieczności wykonywania skomplikowanych obliczeń w celu wyznaczenie jej kolejnych położeń.
Zalety i ograniczenia robotów kartezjańskich
Roboty kartezjańskie mogą też mieć bardzo duże przestrzenie robocze w porównaniu do tych przegubowych i SCARA. Są też bardziej skalowalne, dzięki czemu łatwiej je dostosować do wymaganej przez aplikację przestrzeni roboczej i zakresu dynamicznego. Przykładowo, jeśli wymagania na danym stanowisku obejmują dużą przestrzeń roboczą i udźwig odpowiedni do lekkich ładunków można wykorzystać lżejszy napęd z mniejszym momentem obrotowym, co ograniczy koszty. W przypadku robotów przegubowych, delta i SCARA, których parametry są często "na sztywno" przypisane konkretnym modelom trzeba się zwykle liczyć w takim razie z kompromisem. W opisywanym przykładzie może się przykładowo okazać, że jedynie cięższy (droższy) robot o nadmiernym w stosunku do potrzeb udźwigu zapewni wymagany zasięg w przestrzeni roboczej. Ponadto modułowość robotów kartezjańskich sprawia, że są znacznie wszechstronniejsze i mają dłuższą żywotność w środowisku przemysłowym.
Charakteryzuje je też duża precyzja przemieszczenia, z tolerancjami rzędu mikrometrów. Roboty SCARA oraz przegubowe mają jednak nad nimi przewagę pod względem szybkości pracy. W kartezjańskich liczyć się trzeba też z kompromisem między prędkością a rozdzielczością – im większa jest ta druga, tym mniejsza szybkość. Należy ponadto pamiętać o ograniczonej liczbie stopni swobody do trzech plus ewentualnie oś obrotu narzędzia – jeżeli to za mało ta kategoria robotów jest na starcie zdyskwalifikowana. Wymagają też one precyzyjnego wyrównania oraz płaskiej powierzchni montażowej.
Przegląd aplikacji robotów kartezjańskich
Roboty kartezjańskie sprawdzają się na liniach produkcyjnych w szeregu zadań. Przykładem są stanowiska pick and place, w obrębie których na przykład pojedynczy siłownik wyposażony w chwytak na przykład próżniowy, we współpracy z systemem wizyjnym, podnosi z przenośnika transportowane nim detale, kierując się przy ich wyborze określonym kryterium, jak kolor, i je następnie przekłada do odpowiedniego pojemnika. Roboty kartezjańskie w konfiguracji XY są też wykorzystywane w przenoszeniu obiektów z miejsca na miejsce w synchronizacji z innymi elementami danego stanowiska. Znajdują oprócz tego zastosowanie w zadaniu montażu oraz w dozownikach klejów lub uszczelniaczy, w którym to zastosowaniu są cenione za precyzję. Roboty kartezjańskie mogą się również sprawdzić jako alternatywa obrabiarek CNC. Ich duża dokładność przemawia także za ich użyciem w zgrzewaniu punktowym. Wykorzystuje się je również w paletyzacji.
Kupić, czy skompletować robota kartezjańskiego?
Decydując się na zakup maszyny tytułowego typu można wybierać spośród wstępnie zaprojektowanych modeli. Te są popularnym rozwiązaniem, jeżeli dane stanowisko nie ma specjalnych wymagań, zwłaszcza, że producenci poszerzają swoją ofertę, żeby dopasować ją do coraz szerszego zakresu potrzeb. Można też skompletować własnego robota. To drugie jest konieczne, jeżeli na przykład specyfika aplikacji lub otoczenia stanowiska tego wymagają. Asortyment komponentów do budowy robotów kartezjańskich, przede wszystkim w zakresie siłowników, prowadnic, zestawów połączeniowych i wsporników montażowych, jest również szeroki. Dobór tych komponentów to standardowo pierwszy krok. Kluczowy jest zwłaszcza wybór siłownika – jego parametry są determinowane przez ładunek oraz skok, a głównie przez moment obciążenia.
Następnym etapem powinna być konfiguracja osi. W tym kroku nie tylko dąży się do uzyskania niezbędnych do wykonania danego zadania ruchów, ale również zapewnienia odpowiedniej sztywności systemu. Ta bowiem wpływa na nośność, precyzję ruchu oraz dokładność pozycjonowania.
Na tym etapie zazwyczaj podejmowana jest także decyzja o tym, czy robot będzie w wersji tradycyjnej, czy gantry, jeśli na przykład wymagany jest duży skok albo jedna oś w konfiguracji standardowej byłaby nadmiernie obciążona. Robot w wersji gantry w takim przypadku pozwala uniknąć dużych wibracji albo nadmiernych odchyleń, grożących utratą stabilności konstrukcji.
Na jak najwcześniejszym etapie projektowania trzeba oprócz tego wziąć pod uwagę to, jakimi narzędziami będzie operował robot, na przykład chwytakami, czy głowicami dozującymi. Pozwoli się to upewnić, że nie będzie dochodziło do kolizji między nimi, a pozostałymi elementami systemu.
Następną decyzją projektową jest przeważnie wybór jednostki napędowej siłowników. Poza parametrami wymaganymi do zasilenia elementów wykonawczych warto zwrócić uwagę na aspekt użytkowy. Chodzi o zarządzanie okablowaniem, które jest tym łatwiejsze, im jest go mniej. Na to pozytywnie może wpłynąć wybór napędów zintegrowanych i tych z przewodami łączącymi w sobie funkcje zasilania oraz przesyłu sygnału sprzężenia zwrotnego.
Monika Jaworowska








