
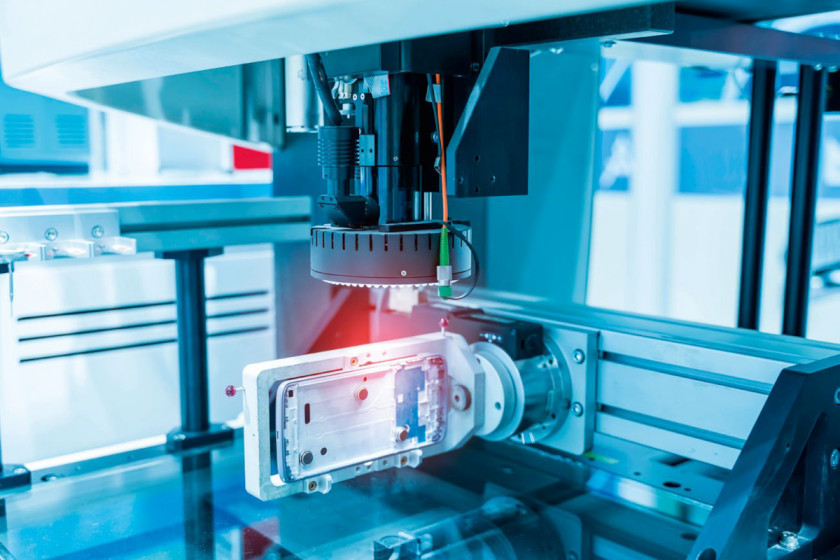
Wyróżnić można kilka technik rejestracji obrazów 3D. Cztery najpopularniejsze to: stereowizyjna, triangulacji laserowej, z wykorzystaniem światła strukturalnego i oparta na zasadzie pomiaru czasu przelotu (Time Of Flight, TOF). Zasadniczo można je podzielić na dwie grupy: w dziedzinie czasu, do której należy metoda TOF oraz w przestrzeni, do której zaliczane są trzy pozostałe. W celu organizacji kompletnego systemu wizyjnego często wykorzystuje się kombinację tych metod. Ich specyfika ma wpływ na jakość obrazu. To powinno się uwzględnić, wybierając kamerę 3D do systemu wizyjnego realizującego konkretne zadanie automatyzacji.
Kamery stereowizyjne
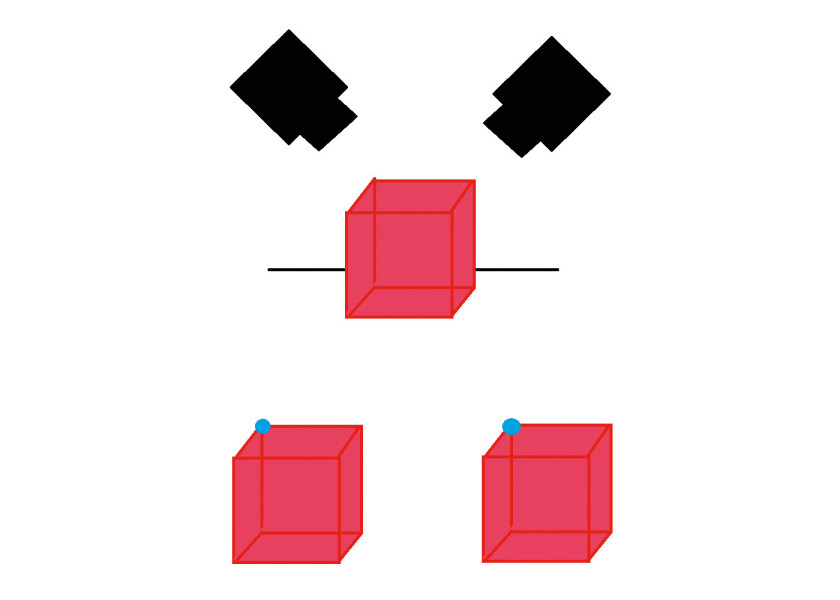
Kamery stereowizyjne odwzorowują mechanizm widzenia obuocznego ludzkiego wzroku. W tym przypadku wykorzystuje się parę kamer, które rejestrują ten sam widok 2D obiektu docelowego pod różnymi kątami. Znając stałe względne położenie kamer, oprogramowanie wizyjne porównuje ze sobą odpowiednie punkty na zapisanych obrazach dwuwymiarowych, wykrywa różnice pomiędzy nimi i w oparciu o nie pozyskuje informacje o głębi i odległościach. Na tej podstawie obliczana jest chmura punktów 3D, czyli cyfrowa reprezentacja przestrzenna obiektu.
Technika ta ma ugruntowaną pozycję. Jej zalety to szybkość oraz duże pole widzenia. Nie wymaga specjalnego oświetlenia ani wbudowanego źródła światła. Kamery stereowizyjne sprawdzają się w związku z tym w rejestracji obrazów na dużych odległościach, również na zewnątrz.
Mimo analogicznego mechanizmu jakość obrazów z kamer 3D tego typu nie dorównuje tym rejestrowanym przez ludzkie oko. Największą trudnością jest ustalenie korelacji pomiędzy punktami na obrazach z różnych kamer. Jest to łatwiejsze dla charakterystycznych punktów obiektu. Przykładem takich są narożniki. Problemy pojawiają się natomiast w przypadku punktów na gładkich, pozbawionych tekstury powierzchniach. W efekcie w obszarach bez cech charakterystycznych obraz 3D jest słabo wypełniony, tzn. ma mniej zagęszczoną chmurę punktów, z tymi brakującymi wyświetlanymi jako "czarne". By tego uniknąć, między kamerami umieszcza się projektor pseudolosowego wzoru, który wypełnia teksturą gładkie obszary na powierzchni obiektu. To niestety komplikuje system i zwiększa jego koszt.
Z drugiej strony w przypadku obiektów z teksturą, w celu ustalenia korelacji pomiędzy punktami na obrazach z różnych kamer, wykorzystywane są obliczeniowo obciążające algorytmy obróbki, które opierają się na uśrednianiu wartości sąsiadujących pikseli. To pogarsza rozdzielczość przestrzenną obrazu.

Triangulacja laserowa. Technika ze światłem strukturalnym
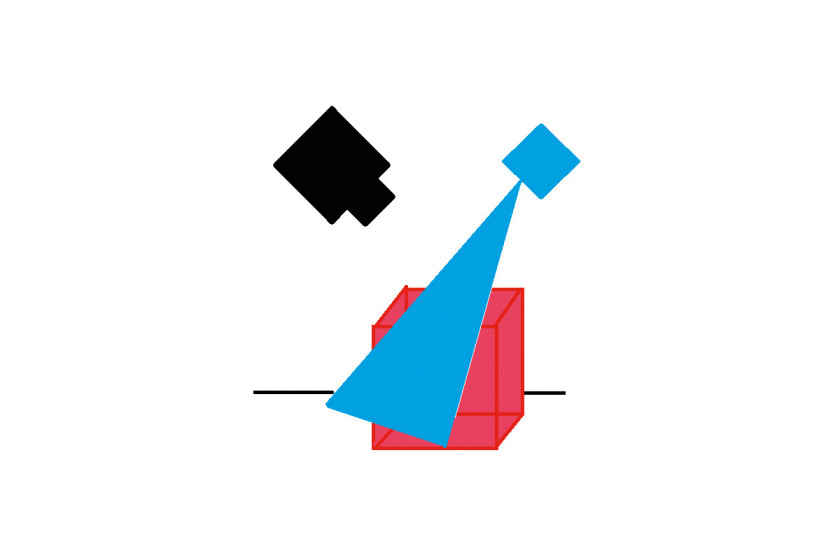
Pierwsza technika polega na przesuwaniu obiektu przez wiązkę światła laserowego. Kamera, która jest umieszczona pod kątem do źródła promieniowania, rejestruje obraz linii świetlnej ulegającej na obiekcie odkształceniu. W miarę jak się on przemieszcza, zapisywane są jego kolejne profile. Są one następnie porównywane z obrazem linii nieodkształconej. To pozwala na pozyskanie informacji o wysokości elementów obiektu. Na tej podstawie obliczana jest chmura punktów 3D.
Technika ta jest prosta i tania w realizacji i zapewnia dużą dokładność. Laser jest źródłem światła monochromatycznego, zatem dzięki wyposażeniu kamery w filtr pasmowy można uzyskać system wizyjny odporny na wpływy światła z otoczenia. Niestety technika ta nie zapewnia informacji o kolorze. Ponadto trudność sprawia rejestracja obrazów powierzchni ciemnych i odblaskowych.
Największą wadą tej metody jest jednak mała szybkość. Ponieważ wykorzystywana jest pojedyncza linia lasera, cały obiekt musi przejść przez linię lasera ze stałą prędkością albo kamera musi się przesunąć nad obiektem. Ważne jest, aby zapewnić stabilność tego ruchu. Z drugiej strony jest to odpowiednia metoda obrazowania 3D obiektów transportowanych na przenośniku, którego nie można zatrzymać.
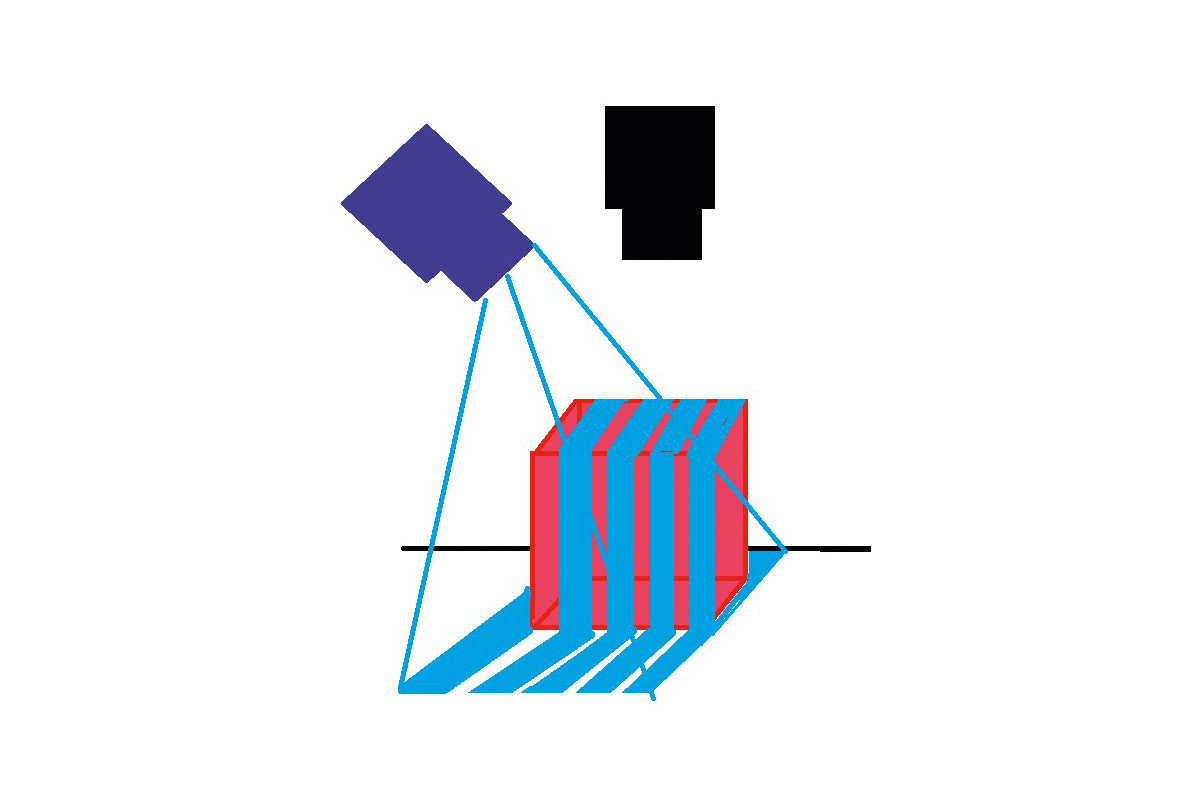
Druga technika jest rozwinięciem tej opisanej powyżej – w tym przypadku też rejestrowane i analizowane są zniekształcenia określonego wzoru świetlnego rzutowanego na powierzchnię, ale obejmuje on całe pole, a nie pojedynczy profil. Zazwyczaj wyświetlana jest siatka składająca się z kilku tysięcy linii świetlnych o wysokim kontraście. Ustrukturyzowany wzór niekoniecznie musi składać się z pasków, mogą to być również na przykład kropki. Ważne, aby pozwalał na uzyskanie jednoznacznych informacji o wszystkich obszarach obrazu. Dzięki temu, że rzutowany wzorzec jest ustrukturyzowany, obróbka danych wizyjnych jest mniej obciążająca obliczeniowo. Z drugiej strony także można się spodziewać trudności w rejestracji obrazów o powierzchniach ciemnych i odblaskowych.
Technika ToF
W tej metodzie odległości wyznacza się na podstawie pomiaru opóźnienia między wyemitowanym promieniem lasera a światłem odbitym od powierzchni obiektu. W tym zakresie wyróżnia się dwa podejścia: wykorzystujące impulsy laserowe albo modulowaną wiązkę lasera.
W pierwszym przypadku czas przelotu impulsu mierzy się bezpośrednio i na tej podstawie oblicza się odległość pomiędzy obiektem a detektorem światła. Czas przelotu promienia świetlnego między obiektem i detektorem w drugim typie kamer 3D oblicza się na podstawie pomiaru przesunięcia fazowego wiązki odbitej. Zapewnia to większą precyzję, wadą jest natomiast zmniejszony zakres pomiarowy oraz mniejsza odporność na wpływy światła z otoczenia.
Kamery 3D TOF są bardzo szybkie. Niestety często mają małą rozdzielczość przestrzenną. Ponadto są mniej precyzyjne na krótkich dystansach w porównaniu z kamerami ze światłem strukturalnym. Z drugiej strony wszystkie obliczenia wykonywane są na poziomie pikseli, co pozwala na uniknięcie szumów blokowych.
Warto na koniec wspomnieć o technice obrazowania 3D ze światłem strukturalnym i równocześnie z kodowaniem czasowym, która łączy w sobie podejścia w dziedzinie czasu i w przestrzeni. W tym przypadku zamiast pojedynczego wzoru na obiekt rzutowana jest seria unikalnych wzorów, których obrazy rejestruje kamera. Oprogramowanie wizyjne analizuje, jak wartości poszczególnych pikseli zmieniają się w czasie, określając rozbieżności między tymi na zarejestrowanym obrazie i wzorze kontrolnym. Jest to bardzo dokładna metoda, jednak wolniejsza, a poza tym obiekt i kamera 3D podczas pomiaru muszą pozostać nieruchome.

Monika Jaworowska









