
Silniki elektryczne to niezbędne komponenty linii produkcyjnych w przemyśle. Przekształcają one energię elektryczną w ruch obrotowy albo liniowy, którego parametry można regulować. Zapewnia to możliwość precyzyjnego sterowania prędkością, przyspieszeniem, momentem oraz pozycjonowania. To w praktyce pozwala na odwzorowanie trajektorii ruchu wyznaczonej przez system sterowania, utrzymanie jego stabilności w warunkach zmiennego obciążenia oraz koordynację ruchów wielu osi w maszynach wieloosiowych.
Silniki odgrywają kluczową rolę w przypadku zadań wymagających wysokiego poziomu precyzji, powtarzalności i wydajności, takich jak montaż, spawanie, dozowanie, pakowanie pick&place czy transport materiałów. W obrębie zautomatyzowanych linii produkcyjnych m.in. napędzają ramiona robotów przemysłowych, przenośniki, stoły obrotowe, podajniki oraz wrzeciona obrabiarek. W tych pierwszych poszczególne stopnie swobody są zwykle wyposażone w oddzielne silniki, od których zależy płynność ruchu ramienia robota i precyzja pozycjonowania narzędzia, którym manipuluje.
W systemach transportu wewnętrznego silniki napędzające taśmociągi warunkują stabilny przepływ materiałów między stanowiskami, co bezpośrednio przekłada się na brak przestojów i w efekcie na ciągłość produkcji. W napędach stołów obrotowych i podajników kluczowa jest z kolei precyzja ich zatrzymywania w określonym punkcie, która usprawnia operacje montażowe. W obrabiarkach zaś od napędu zależy dokładność i powtarzalność wymiarowa oraz szybkość obróbki.
W przemyśle korzysta się z różnych typów silników. Każdy ma swoją specyfikę determinującą jego zastosowanie.
W zaawansowanych serwonapędach dostępna jest funkcja osłabiania pola (field weakening). Polega ona na modyfikowaniu krzywej momentu obrotowego silnika w funkcji prędkości – tak, aby osiągnąć większą prędkość niż znamionowa przy danym napięciu zasilania. Uzyskuje się to przez redukcję siły przeciwelektromotorycznej wytwarzanej w silniku.
W tym celu wykorzystywana jest metoda sterowania zorientowanego polowo (Field Oriented Control, FOC). W technice FOC, opierając się na przekształceniach matematycznych, transformuje się kontrolowane zmienne tak, żeby móc oddzielnie regulować moment i strumień wirnika. Przekształcenia te pozwalają na odwzorowanie ortogonalnej zależności, charakterystycznej dla silników prądu stałego dla pól stojana i wirnika w silnikach prądu przemiennego. Te transformacje to przekształcenia Clarke’a i Parka. Pierwsze z nich transformuje układ trójfazowy do układu dwóch współrzędnych, z kolei drugie przekształca dwufazowe wektory układu stacjonarnego w wektory wirujące. W efekcie uzyskuje się dwie składowe prądu stojana: d i q, za pośrednictwem których można niezależnie i z dużą dynamiką sterować strumieniem wirnika, zależnym od składowej d, oraz momentem obrotowym, powiązanym ze składową q. W normalnej pracy celem sterowania zorientowanego polowo jest utrzymanie zerowej składowej d i zmienianie składowej q w celu uzyskania zadanego momentu obrotowego. W osłabianiu pola z kolei wykorzystuje się to, że dodatnia składowa d wzmacnia strumień, podczas gdy ujemna go osłabia. To drugie oznacza, że siła przeciwelektromotoryczna również ulega zmniejszeniu.
SILNIKI INDUKCYJNE
Trójfazowy silnik indukcyjny zbudowany jest z dwóch części: stojana i wirnika. Stojan składa się z ramy stanowiącej konstrukcję nośną, z żebrami chłodzącymi, wykonanej np. z odlewanego ciśnieniowo aluminium, laminowanego rdzenia magnetycznego oraz uzwojeń, po jednym na każdą fazę. Wirnik zaś – z wału, który przekazuje napęd do obciążenia, laminowanego rdzenia magnetycznego oraz, w przypadku silników klatkowych, nieizolowanych prętów połączonych ze sobą za pomocą pierścieni zwierających. Dodatkowe elementy to: osłony, wentylator, łożyska i skrzynka zaciskowa. Cechę charakterystyczną silnika indukcyjnego stanowi to, że tylko stojan jest podłączony do zasilania – wirnik nie jest zasilany z zewnątrz, zaś prądy, które przez niego płyną, są indukowane przez stojan.

By to wyjaśnić, warto przypomnieć podstawy.
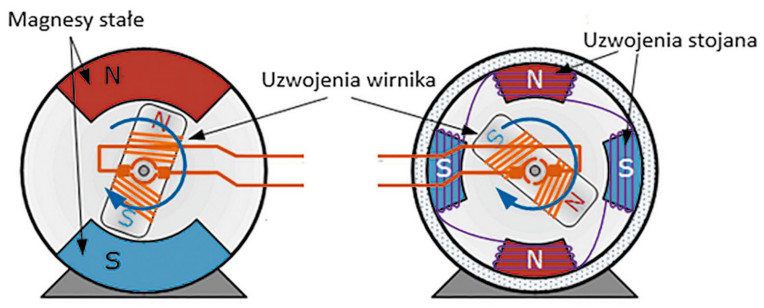
Na rysunku 1a przedstawiono uzwojenie jednofazowe, którym płynie prąd wytwarzający pole magnetyczne. Uzwojenie to tworzy parę biegunów magnetycznych N–S. Strumień magnetyczny wychodzi z bieguna północnego, przechodzi przez szczelinę powietrzną i wirnik, a następnie wraca do bieguna południowego, zamykając się w rdzeniu stojana. Jeżeli uzwojenie jest zasilane prądem przemiennym, wytwarzane pole magnetyczne ma charakter pulsujący – to znaczy, że jego wartość chwilowa zmienia się proporcjonalnie do chwilowej wartości prądu. Rysunek 1b przedstawia układ trzech uzwojeń jednofazowych. Jeśli są zasilane z sieci trójfazowej, prądy I1, I2, I3 będą generować własne pola magnetyczne, H1, H2, H3, w analogiczny sposób. W każdej chwili wypadkowe pole magnetyczne H jest równe wektorowej sumie pól H1, H2 i H3. W rezultacie powstaje wirujące pole magnetyczne o stałej amplitudzie, co obrazują rysunki 1c oraz 1d. Można zatem podsumować, że uzwojenia zasilane z sieci trójfazowej wytwarzają wirujące pole magnetyczne o stałej amplitudzie, odpowiadające polu generowanemu przez obracającą się parę biegunów zasilanych prądem stałym. Pole wirujące wytwarzane przez uzwojenia stojana przecina pręty wirnika, indukując w nich siłę elektromotoryczną. Ponieważ są one zwarte, płyną w nich prądy, które wytwarzają własne pole magnetyczne. Na skutek oddziaływania obu tych pól w wirniku wytwarzany jest moment obrotowy, który wprawia go w ruch i napędza obciążenie połączone z wałem.

Silniki indukcyjne podłącza się do zasilania za pośrednictwem przemienników częstotliwości, które zmieniają częstotliwość i napięcie prądu zasilającego. To umożliwia regulację prędkości obrotowej i momentu obrotowego silnika. Przemienniki wykorzystywane są najczęściej w takich urządzeniach, jak pompy, mieszalniki, sprężarki, wentylatory, przenośniki. Rzadziej natomiast korzysta się z nich, gdy wymagane jest precyzyjne pozycjonowanie, na co wpływa rosnąca popularność i przystępność cenowa serwonapędów.
Przemienniki zbudowane są z prostownika, kondensatora wygładzającego, falownika i sterownika. Zasada ich działania jest następująca: najpierw przemienne napięcie wejściowe jest prostowane w mostku diodowym, a następnie wygładzane i przekształcane w falowniku w napięcie przemienne o zmiennej amplitudzie i częstotliwości, które zasila silnik. Przemienniki mogą pracować w dwóch trybach sterowania: skalarnym oraz wektorowym. W pierwszym utrzymuje się niezmienny stosunek U/f. Sterowanie skalarne sprawdza się, jeżeli nie jest wymagana precyzyjna regulacja prędkości obrotowej, a obciążenia nie charakteryzuje duża inercja. Sterowanie wektorowe z kolei realizuje się bezczujnikowo albo ze sprzężeniem zwrotnym. W pierwszym przypadku prędkość obrotowa jest obliczana na podstawie modelu matematycznego silnika, natomiast w drugim jest on sterowany na podstawie pomiaru aktualnej wartości prędkości.

Łukasz Guzik
Eldar
Jakie typy silników i serwonapędów macie Państwo w swojej ofercie? Jakie są ich główne zastosowania?
Nasza oferta opiera się na dwóch filarach. Pierwszy to serwonapędy AC marki Inovance – m.in. silniki MS1- R (50 W – 7,5 kW) z enkoderami absolutnymi 23- i 26-bitowymi oraz modele dużej mocy ISMG (do 110 kW), przeznaczone do najtrudniejszych aplikacji przemysłowych. Drugi filar to napędy serwokrokowe Fastech, pracujące w zamkniętej pętli, idealne do maszyn wymagających bardzo krótkiego czasu pozycjonowania i pełnego momentu przy niskich prędkościach.
Czy oferują Państwo kompleksowe rozwiązania serwonapędowe, czy poszczególne komponenty osobno?
Firma Inovance, która w zeszłym roku sprzedała najwięcej serwonapędów na swoim rynku wewnętrznym, wyprzedzając europejskie marki, proponuje kompleksowe rozwiązania. Klienci otrzymują gotowe zestawy: serwomotor z enkoderem, serwowzmacniacz (m.in. z komunikacjami Profinet, EtherCAT, CANopen), przewody oraz darmowe oprogramowanie. W ofercie są również sterowniki PLC, panele HMI, falowniki, wyspy IO i roboty przemysłowe. Ofertę serwonapędów uzupełniamy o rozwiązania mechaniki: przekładnie planetarne i moduły liniowe. Pozwala to zbudować układ napędowy maszyny od podstaw, stosując produkty z naszej oferty. Dzięki temu klient otrzymuje w pełni kompatybilne, zoptymalizowane rozwiązanie od jednego dostawcy, co skraca czas projektowania, upraszcza dobór komponentów oraz minimalizuje ryzyko błędów integracyjnych. Dodatkowo zapewnia to łatwiejszy serwis, spójną odpowiedzialność techniczną oraz możliwość precyzyjnego dopasowania parametrów całego układu do aplikacji.
Jak postrzegają Państwo ewolucję rynku serwonapędów względem tradycyjnych rozwiązań z przemiennikami częstotliwości?
Obserwujemy stały wzrost udziału serwonapędów w maszynach – stają się standardem tam, gdzie liczy się zwiększona wydajność, szczególnie jeśli przemiennikowe napędy AC nie gwarantują osiągnięcia wymaganych parametrów maszyny. Klienci również kładą coraz większy nacisk na łatwość integracji sieciowej i bezpieczeństwo. STO SIL3 to dziś branżowy standard, dostępny w większości serwonapędów Inovance. Seria SV680 idzie dalej, oferując w jednym napędzie wspomnianą wysoką wydajność, łatwość integracji sieciowej i szeroki zakres funkcji bezpieczeństwa. Wyróżnia się ona wsparciem dla protokołu FSoE (Fail Safe over EtherCAT), zapewniając najwyższy poziom ochrony operatora i maszyny (SIL3/PLe) na poziomie komunikacji sieciowej. W efekcie okablowanie systemów bezpieczeństwa staje się prostsze i mniej czasochłonne. Profile STO, SS1, SS2, SOS, SLS, SDI, SBC i SSM w tej serii gwarantują operatorowi pełną ochronę i bezpieczną interakcję z maszyną.
SILNIKI DC
Zasada pracy silników elektrycznych prądu stałego jest następująca: pole magnetyczne wytwarzane wokół wirnika na skutek przepływu prądu przez jego uzwojenia oddziałuje z polem magnetycznym, którego źródłem są magnesy (lub uzwojenia) stojana, co wprawia wirnik w ruch. Najpopularniejsze typy silników DC to silniki szczotkowe oraz bezszczotkowe z magnesami stałymi.
Częścią szczotkowych silników prądu stałego, oprócz stojana z wbudowanymi magnesami (albo uzwojeniami) oraz wirnika ze zintegrowanymi uzwojeniami, jest komutator ze szczotkami. Za ich pośrednictwem do uzwojeń wirnika doprowadzany jest prąd. Główne zalety silników tego typu to niski koszt początkowy oraz prostota regulowania prędkości obrotowej. Z drugiej strony, cykliczne mechaniczne przełączanie prądu, któremu towarzyszą nieuniknione tarcie i iskrzenie, prowadzi z czasem do zużywania się szczotek oraz komutatora. W związku z tym podzespoły te wymagają co jakiś czas wymiany. To zwiększa koszty eksploatacji. W silnikach bezszczotkowych prądu stałego natomiast zrezygnowano z komutacji mechanicznej na rzecz komutacji elektronicznej. To pozwoliło na ograniczenie zużycia mechanicznego.
W silnikach tego typu magnesy stałe są wbudowane w wirnik, a uzwojenia w stojan. Te ostatnie są elektrycznie izolowane, dzięki czemu można je załączać niezależnie, tak żeby wytworzone w ten sposób pole magnetyczne w odpowiedni sposób oddziaływało z polem magnetycznym wirnika. W związku z tym komutacja elektroniczna wymaga precyzyjnych danych o położeniu wirnika, które przeważnie mierzy się przy użyciu czujników Halla albo enkodera.
Silniki bezszczotkowe zyskują popularność – np. w przeciwieństwie do szczotkowych, które z powodu ścierania się szczotek stanowią źródło zanieczyszczeń, są preferowane w pomieszczeniach czystych (cleanroomach), m.in. w branżach farmaceutycznej i półprzewodnikowej. Z drugiej strony, silniki szczotkowe mogą wytwarzać duże momenty szczytowe, można uzyskać liniową zależność ich momentu obrotowego od prędkości, co ułatwia sterowanie, i są tańsze.
SILNIKI SZCZOTKOWE
Wyróżnia się dwa typy silników szczotkowych, w zależności od konstrukcji stojana: z magnesami stałymi albo z uzwojeniami wzbudzającymi. W obu przypadkach uzwojenia wirnika zasilane są za pośrednictwem szczotek i komutatora. Silniki z uzwojeniami wzbudzającymi w stojanie można dodatkowo podzielić ze względu na sposób połączenia uzwojeń wirnika i stojana na: szeregowe, równoległe, mieszane. Mimo swojej specyfiki, generalnie zazwyczaj wszystkie wytwarzają większy moment obrotowy i osiągają wyższą prędkość obrotową niż silniki z magnesami stałymi.
Kiedy uzwojenia wirnika i uzwojenia stojana są połączone szeregowo, prądy przez nie płynące są równe, przez co pobór prądu przez silnik staje się znaczny. Moment obrotowy jest proporcjonalny do kwadratu natężenia prądu. Dzięki temu silniki tego rodzaju mogą wytwarzać bardzo duży moment obrotowy, szczególnie podczas rozruchu. Z drugiej strony, trudność sprawia regulacja ich prędkości obrotowej. Wynika to stąd, że wraz ze wzrostem obciążenia silnika jego prędkość obrotowa maleje, co powoduje spadek siły przeciwelektromotorycznej, wzrost napięcia wypadkowego i wzrost prądu. To ostatecznie skutkuje nasyceniem pola magnetycznego. Strumień między wirnikiem a stojanem rośnie wolniej niż tempo wzrostu prądu, w związku z czym silnik nie wytwarza wystarczającego momentu obrotowego, aby przywrócić prędkość obrotową do wartości początkowej.
Ze względu na te cechy – wysoki moment rozruchowy, ale trudności z regulacją prędkości – szczotkowe silniki prądu stałego w konfiguracji szeregowej są często wykorzystywane do rozruchu urządzeń o dużej bezwładności, wymagających dużego momentu rozruchowego, jak dźwigi i windy, a oprócz tego w urządzeniach o jedynie zgrubnej regulacji prędkości, takich jak blendery i narzędzia ręczne.

Jakub Stańczak
B&R (Dywizja Maszyn ABB)
Jakie typy silników i serwonapędów macie Państwo w swoim katalogu? Jakie są ich główne zastosowania?
W B&R mamy do wyboru silniki krokowe oraz serwosilniki. Mamy również kontrolery silników DC, BLDC i krokowych. Ponadto – falowniki do obsługi zewnętrznych silników indukcyjnych oraz szeroką gamę serwowzmacniaczy. Główne zastosowania zaczynają się od prostych maszyn, takich jak podstawowe etykieciarki czy też napędy przenośników taśmowych, przez bardziej skomplikowane zakręcarki, drukarki czy paletyzatory, aż po skomplikowane maszyny CNC i sterowanie ruchem robotów przemysłowych.
Naszym najbardziej nowoczesnym rozwiązaniem, jeśli chodzi o ruch, są napędy magnetyczne: liniowy ACOPOStrak oraz planarny ACOPOS 6D. Wynoszą one produktywność oraz elastyczność maszyn na niespotykany do tej pory poziom. To systemy, które umożliwiają jednostkową produkcję
Czy proponujecie Państwo kompleksowe rozwiązania serwonapędowe, czy poszczególne komponenty osobno?
Pod tym kątem nasza oferta jest bardzo kompleksowa. Po pierwsze, współtworzy ją szeroka gama silników z enkoderami. Od malutkich silniczków rzędu 0,01 Nm do najbardziej precyzyjnych zastosowań, przez standardowe kilkusetwatowe i kilkukilowatowe konstrukcje, po kolosy, które przenoszą moment rzędu 1000 Nm. To sprawia, że jesteśmy w stanie dobrać wraz z klientem silnik idealnie do jego potrzeb. Jeśli chodzi o wzmacniacze – proponujemy kilka serii do obsługi naszej gamy silników. Każda z nich ma nieco inne zastosowanie, jednak jesteśmy w stanie zaoferować rozwiązanie zarówno dla jednego malutkiego silnika, jak i dla ogromnej linii, gdzie współpracują dziesiątki, a nawet i ponad setka silników.
Wszystko powyższe – podobnie jak każdy dowolny komponent B&R – może być spięte w jednym software – Automation Studio. To upraszcza oraz skraca czas programowania nawet kilkukrotnie. Ta mieszanka to coś, co na pewno nas wyróżnia na rynku.
Jakie wsparcie oferują Państwo przy uruchamianiu i strojeniu serwonapędów?
Nasza oferta jest tutaj również bardzo szeroka. W zależności od potrzeb klienta jesteśmy w stanie podejść do tematu wsparcia na kilka różnych sposobów. To zawiera w sobie m.in.:
- szkolenia z zakresu programowania ruchu,
- wbudowane narzędzia diagnostyczne i uruchomieniowe,
- kompleksowe wsparcie na każdym etapie aplikacji.
W równoległym połączeniu uzwojeń wirnika i stojana prąd pobierany z zasilania jest pomiędzy nie rozdzielany. Dzięki temu, że uzwojenia stojana mają dużą rezystancję, silnik podczas rozruchu nie pobiera dużego prądu. W przeciwieństwie do silników z uzwojeniami wirnika i stojana w układzie szeregowym, w tym przypadku możliwości w zakresie regulacji prędkości obrotowej są większe. Wprawdzie podobnie podczas rozruchu przy wzroście obciążenia prędkość obrotowa maleje, siła przeciwelektromotoryczna spada, a napięcie wypadkowe rośnie, ale jednocześnie zwiększa się prąd w uzwojeniach wirnika. Ponieważ moment obrotowy jest w tym układzie do niego proporcjonalny, zatem także rośnie. To zwiększa prędkość silnika, kompensując spadek, który nastąpił po wzroście obciążenia. Dzięki temu w zasadzie prędkość jest stała, niezależnie od obciążenia. Silniki tego typu sprawdzają się, gdy wymagany moment rozruchowy jest niski, ale ważna pozostaje możliwość regulacji prędkości obrotowej przy zmiennym obciążeniu, np. w szlifierkach i tokarkach.
Wyróżnia się dwa rodzaje tarcia: statyczne oraz dynamiczne. Pierwsze występuje, gdy stykające się powierzchnie są nieruchome, np. jeżeli przedmiot leży na stole. Tarcie statyczne zapobiega samoistnemu przesuwaniu się przedmiotu bez wprawienia go w ruch przez siłę zewnętrzną i musi zostać przez taką pokonane, aby przedmiot można było przemieścić. Tarcie dynamiczne z kolei to siła, która przeciwdziała względnemu ruchowi stykających się powierzchni, gdy już się poruszają.
Tarcie statyczne między dwiema powierzchniami jest zawsze większe niż dynamiczne. To pierwsze staje się w systemach sterowania ruchem problemem, ponieważ jeżeli nie zostanie uwzględnione, może skutkować przeregulowaniem pętli sterowania, a następnie, kiedy po rozruchu zaczyna maleć, układ regulacji może utracić stabilność. Teoretycznie można je skompensować, zwiększając wzmocnienia, szczególnie członów proporcjonalnego i/albo całkującego. Zbyt wysokie wzmocnienia, w praktyce, niestety też powodują niestabilność po rozpoczęciu ruchu i zmianie charakteru tarcia ze statycznego na dynamiczne. W związku z tym w serwonapędach często dostępna jest funkcja kompensacji tarcia statycznego, która wytwarza moment obrotowy o odpowiedniej wartości i przez odpowiedni czas, żeby pokonać duże tarcie podczas rozruchu, bez powodowania niestabilności. Zwykle realizuje się to w pętli sprzężenia w przód, podczas automatycznego dostrajania serwonapędu.
SILNIKI BEZSZCZOTKOWE
Jak już wspomniano, w silnikach bezszczotkowych komutacja mechaniczna została zastąpiona komutacją elektroniczną. To pozwala uniknąć zużycia mechanicznego spowodowanego tarciem na szczotkach, co przekłada się na dłuższą żywotność. Brak szczotek pozwala też uniknąć ich iskrzenia na styku z komutatorem, jak i zaburzeń elektromagnetycznych, których emisja towarzyszy przełączaniu za ich pośrednictwem prądu do uzwojeń wirnika w silnikach szczotkowych.
W typowej konstrukcji w silnikach bezszczotkowych magnesy stałe są wbudowane w wirnik, zaś uzwojenia – nawinięte na stojan. Sterownik wyznacza sekwencję komutacji, czyli niezależnego wzbudzania elektrycznie odizolowanych uzwojeń stojana, opierając się w tym celu na informacji z o aktualnym położeniu wirnika.
Choć kształt przebiegu siły przeciwelektromotorycznej silników bezszczotkowych jest teoretycznie trapezowy, w rzeczywistości indukcyjność silnika wygładza go do bardziej sinusoidalnego. Dlatego w ich przypadku mają zastosowanie zarówno komutacja trapezowa, jak i komutacja sinusoidalna. Wprawdzie komutacja trapezowa jest prostsza, ale generuje znaczne tętnienia momentu obrotowego w każdym kroku. Alternatywna metoda sinusoidalna pozwala ich uniknąć, dzięki czemu uzyskuje się płynniejszy ruch, a silnikiem można sterować z większą precyzją.

Krzysztof Dzwonkowski
Lenze
Czy oferują Państwo kompleksowe rozwiązania serwonapędowe (silnik + wzmacniacz + enkoder + oprogramowanie), czy poszczególne komponenty osobno?
Oferujemy kompleksowe rozwiązania napędowe – dostarczamy komponenty od motoreduktora, poprzez przemiennik, okablowanie, aż po sterownik PLC wraz z wizualizacją. Dodatkowo mamy produkty uzupełniające (Lenze Selection), takie jak np. hamulce, sprzęgła, elementy mocujące itp. Można też u nas zaopatrzyć się osobno w poszczególne komponenty, w momencie, gdy planujemy połączyć w jeden system sterowania komponenty różnych producentów. Posiadamy również części zamienne do oferowanych przez nas artykułów.
Jakie metody sterowania dotyczą Państwa serwonapędów (skalarne, wektorowe FOC, bezczujnikowe) i w jakich aplikacjach każda z nich się sprawdza?
Odnośnie do serwonapędów mamy dostępnych wiele algorytmów sterujących silnikiem – zaczynając od sterowania skalarnego (również w wariancie z enkoderem), poprzez bezczujnikowe sterowanie wektorowe oraz silnikami synchronicznymi, aż po tryb serwo. Dla aplikacji o mniejszych wymaganiach, takich jak transport materiałów, najczęściej wystarczają tryby w otwartej pętli sterowania. Dla takich zaś o większej dynamice, jak np. w aplikacjach pozycjonowania czy wału elektrycznego, najczęściej stosowany jest tryb serwo, dający pełną kontrolę nad pozycją, prędkością i momentem na mechanicznym elemencie wykonawczym.
Jakie elementy sprzężenia zwrotnego (enkodery, resolwery, czujniki Halla) polecają Państwo do różnych zastosowań i dlaczego?
Podstawowym sprzężeniem zwrotnym – ze względu na najlepszy stosunek ceny do możliwości – pozostaje domyślnie resolwer. Sprawdza się w większości stosowanych aplikacji. Jeżeli wymagana jest bardzo duża dokładność sterowania lub też konieczność natychmiastowego określenia bieżącej pozycji elementu wykonawczego jeszcze przed wykonaniem jakiegokolwiek ruchu, to stosujemy enkodery absolutne (Hiperface, Endat). Możliwe jest również złożenie układu napędowego z osobnym enkoderem silnikowym oraz pozycyjnym (np. w aplikacjach, gdzie możliwy jest uślizg sterowanego elementu ruchomego).
Jakie wsparcie oferują Państwo przy uruchamianiu i strojeniu serwonapędów?
Dla użytkowników pragnących samodzielnie stworzyć aplikację napędową na podstawie naszych produktów, poza wsparciem doborowym, oferujemy wbudowane w przemiennik procedury autotuningu (również dynamicznego, badającego mechanikę zamontowaną na napędzie), porady w postaci filmów wideo, szkolenia on-line na naszej platformie treningowej oraz stacjonarne, prowadzone przez naszych specjalistów, na co dzień zajmujących się uruchomieniami maszyn. Dodatkowo, dla zagadnień z dziedziny bezpieczeństwa w napędach istnieje specjalny tryb do przeprowadzenia protokołowanych testów odbiorczych.
Komutacja trapezowa (sześciostopniowa) sprawdza się przy dużych prędkościach obrotowych i gdy wymagany jest duży moment rozruchowy. Jest również tańsza w realizacji niż inne metody. Zwykle położenie wirnika silnika jest monitorowane przez trzy czujniki Halla, zamontowane na stojanie i przesunięte względem siebie o 120°. Kiedy wirnik przechodzi nad sensorami, generują one sygnał wysoki albo niski, wskazujący na to, który biegun (N albo S) je minął. Zmiana stanu wysokiego na niski (i odwrotnie) sygnałów z czujników dostarcza sterownikowi informacji o położeniu wirnika co 60°. To znaczy, że jeden pełny cykl obejmuje sześć kroków, z czego wynika alternatywna nazwa tej metody – komutacja sześciostopniowa. Sekwencja przełączeń uzwojeń jest wyznaczana w sterowniku na podstawie kombinacji sygnałów z czujników Halla. By uniknąć wspomnianych tętnień momentu obrotowego, można zastosować komutację sinusoidalną. Zwiększa to koszty, gdyż nie wystarczy już wtedy jedynie przybliżony pomiar położenia wirnika przez czujniki Halla, ale dla większej precyzji śledzenia jego ruchu należy zastosować enkoder.
Podstawowym celem komutacji sinusoidalnej jest zasilanie uzwojeń stojana prądami zmieniającymi się sinusoidalnie przy obrocie wirnika. Prądy w poszczególnych uzwojeniach są przesunięte w fazie o 120°, co jest wymuszone orientacją uzwojeń. Wektor przestrzenny prądu ma stałą wartość i pozostaje zawsze prostopadły do wirnika, maksymalny moment obrotowy jest bowiem wytwarzany, gdy pola magnetyczne stojana i wirnika są ortogonalne. Na podstawie informacji o położeniu wirnika silnika generowane są dwa przebiegi sinusoidalne, z odpowiednim przesunięciem fazowym, o amplitudzie proporcjonalnej do żądanego momentu obrotowego. Odpowiednio do tego sygnału sterownik reguluje prądy w uzwojeniach stojana. Ograniczeniem komutacji sinusoidalnej jest to, że staje się nieefektywna przy dużych prędkościach.
SILNIKI LINIOWE
Ważną grupę stanowią także napędy liniowe. Korzysta się z nich przede wszystkim, gdy wymagana jest duża dynamika oraz precyzja ruchu, w przemyśle, np. w nalewarkach, pakowarkach, robotach kartezjańskich, drukarkach 3D, instalacjach energetyki odnawialnej, jak i poza nim, m.in. w sprzęcie ciężkim, wyposażeniu medycznym, takim jak łóżka rehabilitacyjne czy fotele dentystyczne.
Komponentem napędów liniowych są siłowniki elektryczne. To urządzenia, które przekształcają ruch obrotowy silnika w ruch w linii prostej, w związku z czym używa się ich w różnego rodzaju zadaniach pchania i ciągnięcia – np. w podnoszeniu, upuszczaniu, przesuwaniu przedmiotów. Główne komponenty siłownika elektrycznego stanowią: silnik elektryczny, przekładnia, śruba napędowa, nakrętka napędowa, tłoczysko. Oprócz tego wyposaża się je w różne dodatkowe elementy, przede wszystkim w łożyska, czujniki i elementy je aktywujące.
Zasada działania siłowników elektrycznych jest następująca: silnik elektryczny za pośrednictwem przekładni wprawia w ruch obrotowy śrubę, po której przesuwa się nakrętka napędu, poruszając przymocowanym do niej tłoczyskiem. Są też oferowane w wykonaniu beztłoczyskowym. W takim siłowniku obciążenie jest poruszane przez ruchomy wózek (suwak, karetkę), sprzężony z tłokiem, magnetycznie albo mechanicznie. W konstrukcjach beztłoczyskowych uzyskuje się większe przemieszczenia niż w tych z tłoczyskiem dzięki niewystępowaniu wyboczenia tego elementu. Dlatego te siłowniki mają większy skok. Ich zaletą jest również zwarta budowa.

Arkadiusz Sulenta
Elmark Automatyka S.A.
Czym wyróżniają się Państwa serwonapędy na tle konkurencji? Jakie unikalne funkcje oferują?
Serwonapędy, które oferujemy, wyróżniają się przede wszystkim szerokim przekrojem dostępnych rozwiązań — od prostszych, ekonomicznych wariantów (Elmatic), po bardziej zaawansowane systemy do wymagających aplikacji (Unitronics, Lenze). Jednocześnie naszym głównym wyróżnikiem jest podejście do obsługi i wdrożenia. Skupiamy się na tym, aby oprogramowanie, które stanowi podstawowe narzędzie integratora, było jak najprostsze, intuicyjne i przyjazne. To znacząco skraca czas wdrożenia i ogranicza ryzyko błędów na etapie uruchomienia.
Jak ewoluuje rynek serwonapędów? Czy rośnie zapotrzebowanie na precyzyjne sterowanie kosztem tradycyjnych rozwiązań z przemiennikami częstotliwości?
Nie obserwujemy wypierania przemienników częstotliwości przez serwonapędy. To raczej naturalne dopasowanie technologii do aplikacji. Tam, gdzie kluczowe są precyzyjne pozycjonowanie, wysoka dynamika i synchronizacja osi, rola serwonapędów będzie rosła. Natomiast w wielu klasycznych zastosowaniach, gdzie liczą się przede wszystkim regulacja prędkości, efektywność i cena rozwiązania, przemienniki częstotliwości nadal pozostają bardzo ważnym i uzasadnionym wyborem.
Jakie najczęstsze błędy obserwują Państwo u klientów przy doborze i konfiguracji serwonapędów?
Najczęstszy błąd to dobór napędu wyłącznie na podstawie mocy znamionowej silnika, bez analizy rzeczywistego profilu ruchu. Dosyć częstym błędem, z którego wiele osób nie zdaje sobie sprawy, jest także wybór zbyt złożonych układów. W praktyce nie każda aplikacja wymaga rozbudowanego i kosztownego rozwiązania Motion Control — czasami w zupełności wystarczą budżetowe systemy, np. serwonapędy Elmatic, prostsze do implementacji, szybsze we wdrożeniu i w pełni spełniające wymagania danej maszyny czy procesu.
Jeżeli chodzi o silniki liniowe to wyróżnia się ich trzy typy: rurowe, u-kanałowe i płaskie. Płaskie też dzieli się na grupy. Do pierwszej zalicza się silniki z cewkami przymocowanymi do aluminiowej podstawy i siłownikiem na górze lub po bokach stojana. Ich zaletą jest możliwość płynnej regulacji prędkości. Cecha ta staje się przydatna m.in. w urządzeniach skanujących. Trzeba jednak pamiętać, że pole magnetyczne nie jest blokowane i wycieka na zewnątrz, przez co silnik przyciąga metalowe przedmioty. Bywa to niebezpieczne dla osób w pobliżu. W silnikach płaskich drugiego typu cewki są zamocowane do podstawy z aluminium i stali, która ukierunkowuje pole magnetyczne i zwiększa siłę.
Natomiast w silnikach u-kanałowych siłownik przemieszcza się między dwoma rzędami magnesów ustawionych względem siebie równolegle. Są one droższe, ale nie występuje w nich wyciek pola magnetycznego, co poprawia bezpieczeństwo użytkowania. Z drugiej jednak strony, dla większej wydajności wymagają chłodzenia. Z kolei w silnikach rurowych trwałe magnesy są zamknięte w podpartej z obu końców rurze. Taka konstrukcja ogranicza długość silnika.
Alternatywą dla silników liniowych jest wykorzystanie silnika obrotowego w połączeniu ze śrubą albo przekładnią pasową. W pewnych zastosowaniach, np. w przypadku dużych obciążeń, gdy napędzana oś leży w płaszczyźnie pionowej, jest to lepszym rozwiązaniem. Generalnie jednak silniki liniowe mają przewagę nad tą konfiguracją pod względem możliwości zapewnienia bardzo dużych i małych prędkości, dużego przyspieszenia i dużej precyzji bez luzów. Ponadto uzyskanie ruchu liniowego bez użycia przekładni, elementów sprzęgających, pasów stanowi ogromną zaletę, gdyż te komponenty pogarszają wydajność, niezawodność i skracają żywotność maszyny.
SILNIKI KROKOWE
Niezbędne komponenty napędów to także silniki krokowe (skokowe) bez mechanizmu sprzężenia zwrotnego. W przypadku zastosowań, które tego nie wymagają, silniki tego typu pozostają alternatywą dla serwosilników, w porównaniu z którymi są tańsze i łatwiejsze w sterowaniu.
Silniki skokowe generują ruch przyrostowy, tzn. ich wirniki obracają się w dyskretnych krokach. Przykładowo, skok o 90° oznacza cztery kroki na obrót. Zbudowane są z wirnika i stojana z nawiniętymi uzwojeniami. Ze względu na budowę wirnika wyróżnia się silniki: o zmiennej reluktancji (oporze magnetycznym), z magnesami trwałymi oraz hybrydowe.
Silniki skokowe o zmiennej reluktancji mają najprostszą konstrukcję. Zbudowane są z wirnika wykonanego z niemagnetycznej, miękkiej stali i stojana. Ponieważ wirnik nie jest namagnesowany, brak przyciągania między nim a stojanem, gdy przez uzwojenia tego drugiego nie płynie prąd. Zarówno wirnik, jak i stojan są uzębione. Gdy uzwojenia są zasilane, zęby wirnika ustawiają się w jednej linii z zębami stojana, by zminimalizować reluktancję. Silniki tego typu wytwarzają średnie momenty, nawet przy większych prędkościach, i mają duże skoki. Są niestety głośne, ale za to najtańsze w porównaniu z innymi.
Silniki drugiego typu, z magnesami trwałymi, mają wirnik bez zębów, namagnesowany osiowo, tzn. z naprzemiennymi biegunami N i S równoległymi do jego osi. Uzwojenia stojana umieszczone są w obudowach z miękkiej stali, tzw. puszkach. Kiedy płynie przez nie prąd, uzwojenia oddziałują z wirnikiem. Jego biegun N jest przyciągany do bieguna S stojana i odwrotnie. Wywołuje to obrót wirnika. Silniki z magnesami stałymi mają średnie skoki i wytwarzają duże momenty, ale przy ograniczonych prędkościach.
Najlepsze cechy silników o zmiennej reluktancji i tych z magnesami trwałymi łączą silniki hybrydowe, które są bardzo popularne, szczególnie w przemyśle. Ich wirnik składa się z dwóch sekcji z magnesami stałymi, o przeciwnej biegunowości. Jest uzębiony. Przeważnie na sekcję przypada 50 albo 100 zębów, przesuniętych względem siebie o 1/2 podziałki. Bieguny stojana także są uzębione. Zasilone ulegają namagnesowaniu, co powoduje obrót wirnika tak, by zęby jego i stojana były wyrównane (N–S lub S–N). Hybrydowa budowa, z zębami zarówno na wirniku, jak i na stojanie, zapewnia ukierunkowanie strumienia magnetycznego w szczelinie powietrznej. Dzięki temu silniki te wytwarzają większe momenty niż silniki pozostałych typów. Osiągają również większe rozdzielczości, ze skokami tak małymi, jak 0,72°. Złożona konstrukcja powoduje jednak, że są droższe.
SERWONAPĘDY
Na zamkniętą pętlę ze sprzężeniem zwrotnym, w której pracują serwonapędy, składają się: sterownik, serwowzmacniacz, silnik i element pomiarowy. Sterownik generuje nastawy, porównywane we wzmacniaczu z sygnałem pomiarowym, niosącym informację zwrotną o tym, czy regulacja jest skuteczna. Na podstawie wyznaczonej w ten sposób odchyłki serwowzmacniacz, którego częścią jest przemiennik częstotliwości, steruje silnikiem tak, by tę różnicę niwelować.
Serwonapędy sprawdzają się, kiedy trzeba precyzyjnie regulować położenie wału silnika w celu przemieszczenia napędzanego mechanizmu między różnymi położeniami – np. jeżeli wielokrotnie przesuwa się do pozycji docelowej, a potem wraca do punktu wyjścia, albo podąża określoną ścieżką ruchu. Zastosowania takie zazwyczaj wyróżnia duża dynamika ruchów. Poza tym wymagana jest synchronizacja z innymi mechanizmami, a napęd powinien bez opóźnień reagować na zmianę zadanej prędkości, obciążenia i pozostałych czynników, które wpływają na jego pracę.
W systemach sterowania ruchem serwonapędy regulują położenie, prędkość i moment obrotowy. Realizuje się to w ramach pętli sterowania śledzących i korygujących te wielkości.
W trybie regulacji momentu obrotowego pracą silnika steruje pętla prądowa. Ponieważ wielkość ta jest wprost proporcjonalna do prądu, sterownik na podstawie informacji o jego natężeniu ustala aktualny moment silnika. Następnie porównuje tę wartość z wartością zadaną i wyznacza sygnał sterujący, który dostosowuje prąd silnika. Sterowanie momentem jest przeważnie realizowane w pętli z regulatorem PI.
Moment obrotowy determinuje przyspieszenie silnika, które z kolei ma wpływ na prędkość oraz położenie. Dlatego pętla sterowania prądem stanowi w serwonapędach standard. Poza tym kontrola momentu obrotowego jest wymagana w takich aplikacjach, jak sterowanie nawijaniem, w którym należy utrzymywać stałe naprężenie wstęgi materiału podczas jej nawijania, kiedy w miarę jak zwiększa się średnica rolki materiału, rośnie jej obciążenie i bezwładność. Kolejny przykład to formowanie wtryskowe, w którym do formy powinna być przykładana stała siła docisku.
Rezonans w serwonapędach powodują głównie luzy w elementach mechanicznych, takich jak przekładnie, śruby, sprzęgła. Zjawisko to jest niepożądane, ponieważ pogarsza skuteczność sterowania, powoduje hałas, w skrajnych przypadkach prowadzi do zniszczeń. Zapobiec rezonansowi można, wymieniając komponenty mechaniczne na sztywniejsze. Inne rozwiązanie stanowi zmniejszenie stosunku bezwładności obciążenia do bezwładności silnika, przez zmianę parametrów obciążenia, zmianę silnika na model o większej bezwładności albo użycie przekładni o większym przełożeniu.
Sposoby te są, niestety, w praktyce zazwyczaj trudne do realizacji. Poza tym podczas strojenia serwonapędu rezonans można próbować zmniejszyć albo wyeliminować, obniżając wzmocnienie, co jednak może negatywnie wpłynąć na pasmo przenoszenia i stabilność pętli regulacji. Alternatywą jest dodanie filtru. Dwa popularne typy to: wycinające i dolnoprzepustowe. Filtry wycinające tłumią sygnał w określonym, wąskim zakresie częstotliwości, wokół częstotliwości środkowej. Pozwalają tłumić rezonanse zarówno po stronie obciążenia, jak i silnika, i są zwykle używane, jeśli częstotliwości rezonansowe są wyższe niż szerokość pasma pętli sterowania. Ponieważ jednak tłumią określone częstotliwości, częstotliwości rezonansowe muszą być wcześniej zidentyfikowane. Ponadto ograniczeniem filtrów tego rodzaju jest to, że nie są skuteczne, gdy częstotliwości rezonansowe mogą się znacząco zmieniać. To może być powodowane zmianami bezwładności obciążenia – np. w urządzeniach dozujących obciążenie zmienia się w miarę dawkowania produktu. Częstotliwości rezonansowe mogą także ulegać zmianom wraz ze wzrostem luzów, w miarę jak z upływem czasu elementy mechaniczne się zużyją. Dlatego zazwyczaj wykorzystuje się jeden albo większą liczbę filtrów wycinających w połączeniu z filtrem dolnoprzepustowym. Parametry filtrów zwykle można skonfigurować w funkcji automatycznego strojenia serwonapędu.
STEROWANIE SERWONAPĘDAMI
Jeżeli w danym systemie sterowania ruchem wymagane jest utrzymanie zadanej szybkości nawet przy zmianie obciążenia, serwonapęd pracuje w trybie regulacji prędkości. Wówczas kontroli i regulacji podlega napięcie dostarczane do silnika. Jednocześnie – ponieważ zmiana prędkości silnika w celu przyspieszenia albo zwolnienia wymaga odpowiednio wzrostu lub zmniejszenia momentu obrotowego – w trybie regulacji prędkości niezbędna jest również praca w pętli prądowej.
Informacje o aktualnej prędkości obrotów zapewnia enkoder. Na ich podstawie wyznaczana jest różnica pomiędzy rzeczywistą a docelową wartością tej wielkości. To z kolei umożliwia obliczenie prądu (momentu obrotowego) potrzebnego do korekcji tej odchyłki prędkości silnika. Sterowanie nią jest również przeważnie realizowane w pętli z regulatorem PI.
Przykładami aplikacji, w których serwonapędy pracują w trybie regulacji prędkości, są: sterowanie przenośnikami, dozowanie, a także procesy obróbki, takie jak szlifowanie i polerowanie, w których obciążenie silnika jest zmienne, ale jego prędkość powinna być utrzymywana przez cały proces.

Kamil Niemyjski
igus
Jakie oferują Państwo typy silników i serwonapędów? Jakie są ich główne zastosowania?
W naszej ofercie znajdują się silniki prądu stałego (DC), krokowe oraz bezszczotkowe silniki BLDC, które dobierane są w zależności od wymagań aplikacji pod kątem dynamiki, precyzji oraz kosztu wdrożenia. Silniki DC znajdują zastosowanie głównie w prostych układach napędowych o niewielkich wymaganiach regulacyjnych, natomiast silniki krokowe są powszechnie wykorzystywane w aplikacjach pozycjonujących o średniej dokładności. Z kolei napędy BLDC stanowią rozwiązanie pośrednie między klasycznymi silnikami krokowymi a serwonapędami, oferując korzystny stosunek ceny do osiągów, szczególnie w aplikacjach wymagających stabilnej regulacji prędkości i dłuższej pracy ciągłej.
Czym wyróżniają się Państwa serwonapędy na tle konkurencji? Jakie unikalne funkcje oferują?
Nasze rozwiązania wyróżniają się przede wszystkim szerokim zakresem konfiguracji sprzętowej, co pozwala na ich precyzyjne dopasowanie do wymagań konkretnej aplikacji. Oferujemy zarówno ekonomiczne wersje z przewodami wyprowadzonymi bezpośrednio z obudowy, jak i bardziej zaawansowane warianty wyposażone w przemysłowe złącza, zintegrowane enkodery oraz opcjonalne hamulce. Taka modularność pozwala konstruktorom zoptymalizować zarówno koszty, jak i funkcjonalność układu napędowego bez konieczności przewymiarowania komponentów.
Dla jakich aplikacji przemysłowych Państwa rozwiązania sprawdzają się najlepiej – precyzyjne pozycjonowanie, sterowanie prędkością, kontrola momentu obrotowego?
Nasze systemy napędowe są najczęściej wykorzystywane w aplikacjach wymagających precyzyjnego pozycjonowania oraz stabilnego sterowania prędkością, szczególnie w połączeniu z liniowymi systemami ruchu. W praktyce oznacza to integrację z osiami liniowymi opartymi na bezsmarownych prowadnicach ślizgowych – co pozwala na uzyskanie układów niewymagających konserwacji i dobrze sprawdzających się w środowiskach o podwyższonych wymaganiach czystości lub ograniczonej dostępności serwisowej.
Jakie elementy sprzężenia zwrotnego (enkodery, rezolwery, czujniki Halla) polecają Państwo do różnych zastosowań i dlaczego?
W aplikacjach wykorzystujących ślizgowe prowadnice liniowe, gdzie nie występują bardzo wysokie wymagania dotyczące dokładności pozycjonowania, wbudowane enkodery o rozdzielczości rzędu 500–1000 impulsów na obrót są w pełni wystarczające i pozwalają na stabilną pracę układu. W przypadku aplikacji o wyższych prędkościach obrotowych, przekraczających ok. 400 obr./min, korzystniejszym rozwiązaniem są silniki BLDC, wyposażone wyłącznie w czujniki Halla, które zapewniają odpowiednią informację komutacyjną przy jednoczesnym uproszczeniu systemu i redukcji kosztów.
W jaki sposób realizują Państwo kaskadowe sterowanie w serwonapędach (pętla prądowa, prędkości, położenia) i jakie regulatory stosujecie (PI, PID)?
W przypadku napędów serwokrokowych oraz BLDC stosujemy klasyczną strukturę sterowania, opartą na pętli prądowej oraz pętli położenia, w których wykorzystywane są regulatory typu PI. Takie podejście pozwala na uzyskanie stabilnej i przewidywalnej pracy układu przy jednoczesnym zachowaniu relatywnie prostej struktury sterowania, co ma istotne znaczenie w aplikacjach przemysłowych, gdzie kluczowa jest niezawodność i łatwość uruchomienia.
Jak postrzegają Państwo ewolucję rynku serwonapędów – czy rośnie zapotrzebowanie na precyzyjne sterowanie kosztem tradycyjnych rozwiązań z przemiennikami częstotliwości?
W ostatnich latach obserwujemy znaczący wzrost zainteresowania mniej precyzyjnymi rozwiązaniami silników serwokrokowych i BLDC, które w połączeniu z odpowiednim sterownikiem z powodzeniem zastępują bardziej skomplikowane i precyzyjne klasyczne silniki serwo.
Jakie nowe technologie i funkcje w serwonapędach zyskują na znaczeniu?
Z jednej strony, wzrasta zapotrzebowanie na rozwiązania wyposażone w przemysłowe protokoły komunikacyjne (ze względu na unifikację sterowania). Z drugiej, popularność zyskują rozwiązania oparte na komunikacji po wejściach/wyjściach cyfrowych, takiej jak sterownik D1 od igus, które umożliwiają stworzenie prostych aplikacji bez sterowników nadrzędnych.
Jakie są najczęstsze błędy przy doborze i konfiguracji serwonapędów, które obserwują Państwo u klientów?
Najczęściej spotykanym problemem jest niedokładne oszacowanie obciążenia układu, obejmujące zarówno masę przemieszczanych elementów, jak i siły oporów ruchu czy wymagane przyspieszenia. Błąd ten prowadzi zazwyczaj do niedowymiarowania napędu lub jego przewymiarowania, co bezpośrednio przekłada się na pogorszenie parametrów pracy lub niepotrzebny wzrost kosztów systemu.
Jak pomóc klientom w wyborze między różnymi typami silników – kiedy lepszy będzie silnik krokowy, kiedy serwonapęd, a kiedy rozważyć napęd liniowy zamiast obrotowego ze śrubą?
Kluczowym etapem jest szczegółowa analiza parametrów aplikacji, w tym wymaganej prędkości, przyspieszeń, cyklu pracy oraz charakteru obciążenia. Na tej podstawie możliwe jest nie tylko dobranie odpowiedniego typu silnika, ale również wskazanie właściwego sterownika oraz funkcji regulacyjnych, które pozwolą w pełni wykorzystać potencjał układu. Istotne jest także rozważenie alternatywnych koncepcji napędowych, takich jak zastosowanie napędu liniowego zamiast klasycznego układu śruba–nakrętka, jeśli wymagania aplikacji uzasadniają takie podejście.
Serwonapędy mogą również działać w trybie pozycjonowania. To pozwala silnikowi przemieszczać ładunek do określonej lokalizacji – albo względem miejsca początkowego, albo opierając się na jego położeniu bezwzględnym. W trybie regulacji położenia przeważnie korzysta się z trzech pętli sterowania: momentem obrotowym, prędkością i położeniem. Wynika to stąd, że prędkość silnika powinna być monitorowana, aby można było wyznaczyć jego położenie. Z kolei moment obrotowy powinien być monitorowany w celu określenia, ile prądu potrzebuje silnik, by osiągnąć zadaną pozycję, bez niedoregulowania albo przeregulowania. Pętla regulacji położenia działa zazwyczaj, opierając się na regulatorze PI albo PID.
W pętli pozycjonowania – na podstawie zadanej pozycji, która jest porównywana z informacją o aktualnym położeniu, pozyskiwaną dzięki sprzężeniu zwrotnemu – zostaje wyznaczony sygnał różnicy. Staje się on wartością zadaną w pętli regulacji prędkości. W niej z kolei ta wartość zestawiana jest z rzeczywistą wartością prędkości zmierzoną przez komponent sprzężenia zwrotnego. Wyznaczona w taki sposób różnica staje się wartością zadaną w pętli regulacji momentu. Pętle te są zatem w sobie zagnieżdżone.
Gdy występuje więcej niż jedna pętla sterowania, łączy się je kaskadowo. Sterowanie prądem pozostaje najbardziej wewnętrzną pętlą. Pętlę sterowania prędkością dodaje się wokół pętli prądowej. Pętla kontroli położenia jest dodawana wokół pętli prędkości, stając się tą najbardziej zewnętrzną.
Monika Jaworowska










