W przypadku wspólnego prowadzenia przewodów zasilających i sygnałowych powstają zaburzenia oraz indukowane są prądy zakłócające pracę układu zawierającego serwowzmacniacz. Natężenie wzbudzanego prądu zakłócającego jest proporcjonalne do długości kabla, pojemności pomiędzy przewodami napędu i sygnałowymi oraz szybkości narastania napięcia. W danym kablu prąd zakłóceń można obliczyć z zależności: Izakł = C dV/dt, gdzie C jest pojemnością pomiędzy przewodami zasilającymi a sygnałowymi, a dV/dt szybkością narastania sygnałów generowanych przez serwowzmacniacz.

Prądy zakłóceń o częstotliwości rzędu kilku MHz i natężeniu na poziomie 1-2A powodować mogą wadliwe działanie czułych układów elektronicznych. Przykładowo sygnały sprzężenia zwrotnego z enkodera w silniku mogą być zaburzane przez wpływ prądu płynącego w przewodach zasilających. W przyrządach i zautomatyzowanych systemach występują tez liczne układy wrażliwe na działanie prądów zakłócających.
Chociaż konstruktorzy tych urządzeń nie mają wpływu na szybkość narastania impulsów zasilających silniki, mogą posłużyć się technikami ograniczania wpływu powstających z tego powodu zaburzeń. Pierwszym krokiem w tym kierunku powinno być zadbanie o odpowiednie okablowanie. Przewody sygnałowe należy prowadzić w oddzielnych wiązkach z dala od kabli zasilających. Oba rodzaje przewodów powinny być ekranowane, a ekrany powinny być w odpowiedni sposób łączone. W niektórych przypadkach konieczne może być wstawienie pomiędzy wzmacniaczem i silnikiem filtru odcinającego.
Źródła kłopotów
Kable zasilające silnik mogą być źródłem zaburzeń nie tylko dla sygnałów transmitowanych w sąsiednich przewodach, ale też wszystkich przewodzących powierzchni, nawet korpusu silnika. W ostatnim przypadku prądy płyną drogami o najmniejszej impedancji i mogą wywoływać skutki trudne do analizy. Samo ekranowanie wielu przewodów problemu nie rozwiązuje, gdyż kluczowe znaczenie ma właściwe uziemianie ekranów.
Trzeba upewnić się, że ekran obejmuje możliwie wszystkie przewody sygnałowe, powinien on też być połączony wyłącznie z masą serwowzmacniacza (serwonapędu), a nie obwodów czujnikowych po drugiej stronie przewodów (metoda ta jest powszechnie uznana i minimalizuje różnicę potencjałów w pętli uziemiającej obwodu sygnałowego). Ekranowanie kabli napędu silnika, które omówione zostało poniżej, jest z kolei rozwiązywaniem odbiegającym od tego, co wydawałoby się dla projektanta systemu intuicyjne.
Punktem wyjścia do redukcji zaburzeń generowanych przez kable jest użycie ekranów, które je odcinają. Ekran zamyka kable w swego rodzaju klatce Faradaya, a prądy zakłócające są wtedy indukowane w ekranie za pośrednictwem pojemności kabel-ekran, przez co tworzy on ścieżkę powrotną do wzmacniacza. Dzięki swojej małej impedancji dla dużych częstotliwości zakłócających ekran de facto zwiera alternatywne i kolidujące z działaniem układu ścieżki powrotne zakłóceń.
Uzwojenia napędowe serwosilnika są pojemnościowo sprzężone z jego korpusem, przez co przy braku alternatywnych dróg przepływu powstające wewnątrz silnika prądy zakłócające (szczególnie o dużych częstotliwościach) znajdują własną ścieżkę powrotną przez korpus. Dodatkowo drgania silnika i wibracje maszyny mogą wywoływać spore zmiany w przepływie prądów zakłócających, prowadząc do niestabilnych i trudnych do zdiagnozowania problemów w działaniu zespołu.
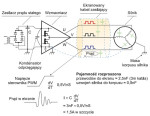
Ekrany kabli napędu silnika nie tylko przejmują poprzez sprzężenie pojemnościowe zaburzenia z przewodów, ale tworzą także ścieżkę powrotną o niskiej impedancji dla prądu zakłóceń samego silnika. W konsekwencji i wbrew konwencjonalnej wiedzy o unikaniu pętli uziemiających, ekran kabli łączy się zarówno z masą zasilacza serwowzmacniacza, jak i z korpusem silnika (rys. 1). Ekran powinien obejmować kable zasilające w maksymalnym możliwym stopniu, a jego połączenia z serwowzmacniaczem i korpusem silnika powinny być krótkie. Należy unikać silnego zginania przewodów pod kątem, gdyż zwiększa to ich impedancję w istotnym dla częstotliwości zakłócających stopniu.
Najmniej korzystny przypadek

Indukowane w ekranie kabli i korpusie silnika prądy zakłóceń osiągają wartość maksymalną, gdy wzrastające i opadające zbocza wszystkich trzech przebiegów U, V i W zbiegają się w czasie (formalnie zbocza narastające i tak zawsze są w fazie). Przebiegi te zbiegają się przy zerowym obciążeniu, gdy silnik jest nieruchomy (patrz rys. 1). Zbocza opadające są również zbliżone w czasie, gdy silnik ma określone obroty, a powstające obciążenie jest niewielkie.
Do obliczeń wykonanych dla rys. 1 przyjęto przypadek najbardziej niekorzystny dla ekranowanych kabli o długości 3m. Szybkość narastania impulsów PWM napędzających silnik wynosi 0,5V/ns, zmierzona pojemność kabli do ekranu wynosi 2,5nF, a uzwojeń silnika do korpusu około 0,5nF. Z równania przedstawionego na początku artykułu wyliczyć można, że szczytowa wartość prądu zakłóceń wynosi 1,5A. Tak duże natężenie prądu zakłóceń z pewnością będzie miało znaczny wpływ na zerojedynkową interpretację stanów czułych układów logicznych.
O ile na rys. 1 przedstawiono metody redukowania zakłóceń, rys. 2 przedstawia główne miejsca wrażliwe na zaburzenia. W tym źle zaprojektowanym systemie brakuje ścieżki powrotnej dla prądów zakłóceń kabli i silnika. Dla celów poglądowych na rysunku pokazano czujnik akustyczny, którego przewody sygnałowe biegną we wspólnym ekranie z kablami zasilania silnika. Sprzężenie między tymi przewodami wprowadza zakłócenia, które nakładają się na dane akustyczne. Oprócz zaburzenia pracy procesora danych akustycznych prądy zakłóceń muszą znaleźć swoją ścieżkę powrotną z procesora akustycznego do tranzystorów mocy serwowzmacniacza. Mogą one powracać przez korpus silnika, wywołując zaburzenia w jeszcze innych miejscach systemu.
Serwowzmacniacz off-line
Serwowzmacniacze off-line zawierają wewnętrzny zasilacz prądu stałego pozwalający łączyć je bezpośrednio z siecią 50/60Hz. Niepotrzebny staje się oddzielny zasilacz napięcia stałego i transformator. Wzmacniacze takie zwykle pracują z napięciem przemiennym 120/240VAC, co oznacza napięcie stałe dochodzące przy braku obciążenia do 300V. Z powodu ograniczonej pojemności kondensatora wyjściowego zasilacza wadą serwowzmacniaczy off-line są spore spadki napięcia w całym zakresie obciążeń.
Jak wynika z dyskusji dotyczącej układu przedstawionego na rys. 1 największe sprzężenia zakłócające występują wtedy, gdy zbocza narastające i opadające przebiegów PWM są zbieżne lub bliskie zbieżności. W bezruchu silnik pobiera moc bliską zeru, a zasilacz napięcia stałego osiąga napięcie bliskie maksymalnemu. Największe sprzężenie zakłócające występuje więc z najwyższym napięciem pracy wzmacniacza.
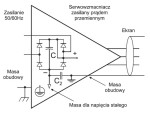
W serwowzmacniaczach off-line, podobnie jak w wersjach zasilanych osobno, używa się częstotliwości przełączania z zakresu 10kHz do 20kHz. Przy takiej częstotliwości i pod wysokim napięciem wzmacniacze muszą przełączać prądy możliwie szybko w celu obniżenia strat w tranzystorach IGBT. Szybkie przełączanie (krótki czas narastania) zwiększa możliwość generowania zaburzeń. Ponieważ zasilacz napięcia stałego „pływa” względem uziemienia, jego masa nie może być bezpośrednio połączony z obudową wzmacniacza. Zamiast tego kondensatorem C2 (patrz rys. 3), który dobierany jest pod kątem uzyskania małej impedancji dla częstotliwości zaburzeń, łączy się masę zasilacza z masą wzmacniacza. Z tą masą powinien być połączony także ekran kabla.
Filtr odcinający
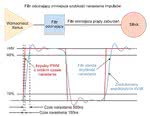
W przypadku zastosowania wzmacniacza off-line o większej szybkości narastania sygnału PWM przy braku bezpośredniego połączenia ekranu kabla i masy zasilacza układ wymagać może dalszych działań zmierzających do redukcji zakłóceń. Możliwe jest m.in. zastosowanie filtru odcinającego w miejscu, w którym ze wzmacniacza są wyprowadzane kable do silnika (patrz rys. 4). Filtr taki wyposażony w połączenie zapewniające ciągłość ekranowania i powinien zostać umieszczony możliwie najbliżej wzmacniacza. Służy on do obniżenia szybkości narastania impulsów PWM z 0,5V/ns do około 0,2V/ns. Natężenie prądu zakłócającego jest wprost proporcjonalne do szybkości narastania impulsów, więc dla układu z rys. 1 obniży się z 1,5A do 0,6A. Uzyskuje się to z minimalną stratą energii w filtrze.
Podsumowanie
Serwowzmacniacze są ze swojej natury generatorami zaburzeń. Można jest zmniejszać separując przewody sygnałowe od kabli zasilających silnik i zaopatrując je w ekrany. Chociaż projektant napędów nie może zmniejszyć szybkości narastania impulsów sterujących, może on użyć krótkich przewodów, ekranować je i we właściwy sposób połączyć. Powinien wybrać również silnik o oddzielonych wyprowadzeniach przewodów napędowych i sygnalizacyjnych, a w razie potrzeby użyć filtru odcinającego.
KKP










