
Silniki indukcyjne prądu przemiennego
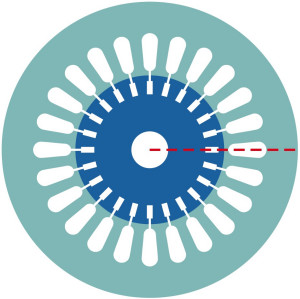
Rys. 1. Przekrój poprzeczny silnika indukcyjnego: wirnik (niebieski) i stojan (zielony)
Silniki te, które są najbardziej rozpowszechnionymi w przemyśle wersjami, dzielą się na jedno- oraz trójfazowe. Są one zasilane prądem przemiennym wytwarzającym wirujące pole magnetyczne. Ich wirniki zawierają pręty miedziane lub aluminiowe, a uzwojeniem stojana są przewody miedziane. Na rysunku 1 przedstawiono przekrój poprzeczny przykładowego silnika indukcyjnego w jednej z wielu możliwych konfiguracji z wirnikiem z 28 rowkami oraz stojanem z 24 rowkami.
Wirujące pole magnetyczne stojana indukuje prądy w prętach wirnika, który zaczyna się obracać z określoną prędkością. Między prądem wirnika a prądem stojana powstaje przesunięcie fazowe rosnące wraz z obciążeniem. Wynikiem tego jest wzrost momentu przy jednoczesnym spadku prędkości, która po osiągnięciu wartości krytycznej gwałtownie spada do zera.
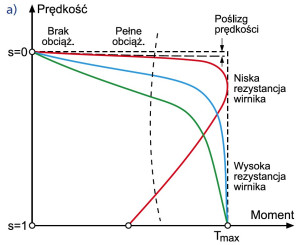
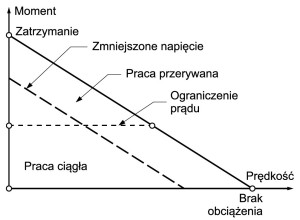
 Silniki indukcyjne prądu przemiennego mogą uzyskać wystarczający moment przy stałym wzbudzeniu przed osiągnięciem punktu krytycznego (rys. 2a). Zależność moment–prędkość ma charakter nieliniowy przy stałym napięciu i częstotliwości. O kształcie krzywej decyduje również rezystancja wirnika, zależna od konfiguracji rowków.
Silniki indukcyjne prądu przemiennego mogą uzyskać wystarczający moment przy stałym wzbudzeniu przed osiągnięciem punktu krytycznego (rys. 2a). Zależność moment–prędkość ma charakter nieliniowy przy stałym napięciu i częstotliwości. O kształcie krzywej decyduje również rezystancja wirnika, zależna od konfiguracji rowków.
Zwiększenie rezystancji spowoduje jednak, oprócz wzrostu momentu początkowego, także wzrost emisji ciepła oraz spadek sprawności. Przy stałej częstotliwości napięcia zasilającego prąd stojana jest niemal stały przy rosnącym momencie, co oznacza duże marnotrawstwo energii przed osiągnięciem punktu pracy. Moment początkowy jest zwykle mniejszy niż znamionowy, więc wymagane jest stosowanie elektronicznego układu sterującego (falownika).
|
|
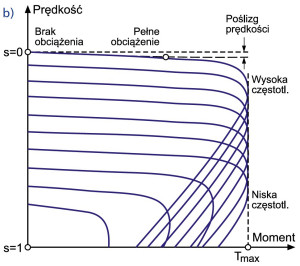
| Rys. 2. Zależność moment–prędkość: przy stałym napięciu i częstotliwości (a), przy zmiennej częstotliwości (b) | |
Ważnym postępem w dziedzinie silników indukcyjnych prądu przemiennego było powstanie napędu falownikowego w latach 70. zeszłego wieku oraz nowych metod sterowania, takich jak stały stosunek V/Hz czy sterowanie wektorowe. Napędy o zmiennej częstotliwości (V/Hz) mają znacznie większą sprawność w szerokim zakresie prędkości oraz zapewniają mniejszą emisję ciepła z uzwojeń stojana.
Na rysunku 2b przedstawiono przykładowe krzywe moment-prędkość silnika indukcyjnego dla częstotliwości od 6 do 60 Hz w odstępach co 6 Hz. Z wykresu widać, że od 12 Hz moment początkowy jest znacznie większy w porównaniu do napędu o stałej częstotliwości.
Silniki bezszczotkowe z magnesami stałymi
 W ostatnich latach dużą popularność na rynku zyskały silniki bezszczotkowe z magnesami stałymi. Takimi wersjami są zarówno silniki BLDC (bezszczotkowe zasilane napięciem stałym), jak też wersje zasilane napięciem przemiennym PMSM. Na pierwszy rzut oka ich budowa jest taka sama, silniki prawie się nie różnią od strony mechanicznej.
W ostatnich latach dużą popularność na rynku zyskały silniki bezszczotkowe z magnesami stałymi. Takimi wersjami są zarówno silniki BLDC (bezszczotkowe zasilane napięciem stałym), jak też wersje zasilane napięciem przemiennym PMSM. Na pierwszy rzut oka ich budowa jest taka sama, silniki prawie się nie różnią od strony mechanicznej.
Często, szczególnie w zagranicznej prasie, jako PMSM (Permament Magnet Synchronous Motor) podaje się skrót BLAC Motor (podobnie jak BLDC, tylko tu jest Brushless AC Motor). Silnik PMSM to silnik synchroniczny zasilany najczęściej z falownika przebiegiem sinusoidalnym. Stosowany jest tam, gdzie wymaga się małych pulsacji momentu.
 Z kolei silnik BLDC jest wersją, gdzie, w wielkim uproszczeniu, komutator mechaniczny został zastąpiony przez komutator elektroniczny (np. przełączniki tranzystorowe). Jego nazwa wywodzi się stąd, że zamienione zostały role stojana i wirnika. Rolę komutatora przejął tutaj układ elektroniczny, zadaniem którego jest komutacja (przełączanie) uzwojeń stojana w odpowiednich chwilach i wytworzenie pola wirującego.
Z kolei silnik BLDC jest wersją, gdzie, w wielkim uproszczeniu, komutator mechaniczny został zastąpiony przez komutator elektroniczny (np. przełączniki tranzystorowe). Jego nazwa wywodzi się stąd, że zamienione zostały role stojana i wirnika. Rolę komutatora przejął tutaj układ elektroniczny, zadaniem którego jest komutacja (przełączanie) uzwojeń stojana w odpowiednich chwilach i wytworzenie pola wirującego.
Bazuje on na czujnikach położenia wału albo wykrywaniu przejścia przez zero niezasilanej fazy. Aby silnik nie szarpał, na czas włączenia danej fazy siła przeciwelektromotoryczna powinna być w miarę stała i dlatego silniki BLDC projektuje się tak, aby miały trapezowy kształt napięcia, a narastanie i opadanie napięcia zachodzi w momencie, gdy akurat ta faza nie jest zasilana.
Działanie silników i sterowanie ich pracą
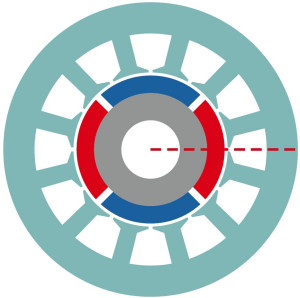
Rys. 3. Przekrój poprzeczny bezszczotkowego silnika z magnesami stałymi (czerwony, zielony) na czterobiegunowym wirniku (niebieski) wraz ze stojanem (zielony)
Na rysunku 3 przedstawiony został 4-biegunowy wirnik silnika bezszczotkowego z magnesami stałymi, które mogą być wykonane z ferrytu lub metali ziem rzadkich, oraz stojan z 12 rowkami i uzwojeniami miedzianymi. Uzwojenia stojana są cyklicznie przełączane, aby zapewnić obrót w procesie komutacji.
Pole magnetyczne wirnika jest zsynchronizowane z przełączaniem się uzwojeń stojana i jego polem magnetycznym. Ponadto częstotliwość silnika bezszczotkowego z magnesami stałymi zależy od rodzaju układu przełączającego, opartego np. na czujnikach Halla.
Do określenia zależności moment–prędkość silnika przy sterowaniu napięciowym można wykorzystać pomiar wstecznej siły elektromotorycznej (EMF). Dzięki liniowej zależności między momentem a prędkością (rys. 4) moment początkowy może być nawet czterokrotnie większy od znamionowego, co pozwoli na szybkie przyspieszenie. Liniowość umożliwia ponadto łatwe wyznaczenie charakterystyki momentu w każdej aplikacji.
Liniowa zależność przy osadzeniu magnesów na powierzchni wirnika jest główną zaletą silnika z magnesami stałymi. W bardziej złożonych projektach magnesy umieszczane są wewnątrz piasty, a kształt krzywej moment–prędkość jest modyfikowany dla uzyskania szerszego zakresu prędkości przy stałej mocy. Najbardziej popularne konfiguracje uzwojeń w przypadku takich silników to trójkąt i gwiazda.
Rys. 4. Liniowa zależność między momentem a prędkością silnika BLDC dla zmiennej częstotliwości oraz zależność stała przy sterowaniu prądowym
Sterowanie ruchem dzieli się na sterowanie prędkością i położeniem. Jednofazowe silniki indukcyjne prądu przemiennego są bardzo popularne w aplikacjach o stałych i zmiennych prędkościach. Potrzeba większej sprawności, szczególnie w pompach, wentylatorach oraz dmuchawach stosowanych w aplikacjach komercyjnych i przemysłowych, wymaga jednak napędu o zmiennej częstotliwości (FVD), aby uzyskać większy moment i prędkość.
W celu zwiększenia sprawności stosuje się silniki indukcyjne z inwerterami sterowanymi wektorowo, szczególnie w aplikacjach o mocy większej niż 3 kW o szerokim zakresie prędkości. Jest to tanie rozwiązanie, jednak ma również pewne ograniczenia.
Pierwszą aplikacją masowego użytku dla bezszczotkowych silników z magnesami stałymi była precyzyjna regulacja prędkości w dyskach twardych. Dzisiaj silniki te są popularne w systemach mechatronicznych, a także zastosowaniach serwonapędowych.
Grzegorz Michałowski














