Dla inżyniera automatyka symulacja i modelowanie rzeczywistych obiektów są przydatne podczas poznawania zjawisk zachodzących z automatyzowanych procesach. Coraz częściej symulatory i programy do symulacji wykorzystywane są podczas szkoleń i przygotowywania nowych pracowników do pracy na rzeczywistym obiekcie.
Rozwój stosowanego oprogramowania jest obecnie bardzo dynamiczny, zaś rosnące możliwości komputerów osobistych pozwalają na wykorzystanie go w codziennej praktyce inżynierskiej. W artykule zostanie przedstawione modelowanie i symulacja serwonapędu jako przykład możliwości przeprowadzenia prostych analiz układów regulacji z wykorzystaniem ogólnodostępnych i tanich programów stanowiących interesującą alternatywę dla komercyjnych aplikacji.
Podstawy

Rys. 1. Interfejs programu ModelQ; oznaczenia: 1 - menu główne, 2 - przyciski szybkiego dostępu, 3 - palety komponentów, 4 - formularz
Narzędzia programistyczne służące do symulacji układów mechatronicznych, czyli takich, które łączą w sobie funkcje elektroniczne i mechaniczne, pozwalają inżynierom projektującym, tworzącym lub rozwijającym nowe produkty na szybkie prototypowanie, wizualizację oraz analizę złożonych urządzeń. Utworzone modele są często wykorzystywane później również w sprzętowych 
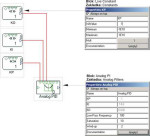
Rys. 2. Schemat serwomechanizmu z regulacją od położenia
Poprzez symulację złożonych systemów można określić i zrozumieć ich zachowanie stosunkowo niskim kosztem. Pozwala to zredukować czasochłonne badania teoretyczne, uniknąć budowy prototypu urządzenia, którego działanie jest trudne do przewidzenia oraz związanych z tym złożonych i kosztownych testów.
Rys. 3. Blok regulatora PID
Programy do symulacji stanowią oprócz zastosowań inżynierskich także atrakcyjne narzędzie w edukacji. Nie bez przyczyny od dawna stanowią one narzędzie dydaktyczne w naukach inżynieryjnych takich jak automatyka przemysłowa, robotyka, przemysł samochodowy. Obecnie do grupy nauk wykorzystujących złożone modele wchodzą także badania w innych dziedzinach takich jak ekonomia, biologia lub medycyna.
Do najpopularniejszych aplikacji przeznaczonych do modelowania i symulacji układów dynamicznych należą znane wielu inżynierom środowiska takie jak Matlab-Simulink i Mathematica, których stosowanie wykracza daleko poza analizę układów automatyki. Koszt takich aplikacji jest jednak dosyć duży, co ogranicza ich zastosowanie w wielu firmach. Rozwijane są jednak ich odpowiedniki jak chociażby Scilab-Scicos, Octave, ModelQ, które należą do oprogramowania ogólnodostępnego i mogą stanowić przydatne narzędzie wspomagające badanie układów regulacji (patrz ramka 2).
Program ModelQ

Rys. 4. Blok konwertora
W artykule jako narzędzie do modelowania i symulacji układu sterowania serwomechanizmu będzie wykorzystane środowisko ModelQ firmy QXDesign. Cena pełnego programu wynosi 349 dolarów, ale na stronie producenta (http://www.qxdesign.com/VisualModelQ.htm) dostępna jest bezpłatna wersja demonstracyjna programu, która nie ma ograniczeń czasowych. Jedynym mankamentem jest uniemożliwienie zapisywania bardziej skomplikowanych modeli.
Zaletą wykorzystanego pakietu jest łatwość projektowania układów sterowania serwomechanizmów. Program w wersji demonstracyjnej nadaje się idealnie do celów edukacyjnych.
ModelQ jest narzędziem do symulacji, w którym szczególny nacisk położony został na łatwość projektowania układów sterowania serwomechanizmów. Jego budowa jest charakterystyczna dla różnych środowisk symulacyjnych w których projektant rysuje schemat blokowy symulowanego układu (Simulink, Scicos). Interfejs programu przedstawiono na rys. 1.
Podstawowe operacje, takie jak np. zapisywanie zaprojektowanego układu do pliku, odczyt z pliku, elementarne opcje kopiowania i wklejania elementów są zgrupowane w menu głównym (1) a najważniejsze opcje w zbiorze przycisków szybkiego dostępu (2). Symulowany układ rysowany jest na formularzu (workspace) (4) z wykorzystaniem standardowych elementów (blocks, components) i połączeń (wires). Są one zgrupowane na paletach (3).
Celem tworzenia modeli w postaci bloków i połączeń pomiędzy nimi jest skojarzenie symulowanego układu z rzeczywistym urządzeniem. Dodatkowo pozwala to zobrazować kierunek przesyłania sygnałów pomiędzy poszczególnymi elementami, co ułatwia i przyspiesza projektowanie.
Schemat serwomechanizmu
W dalszej części omówione zostanie modelowanie i symulacja układu regulacji położenia serwomechanizmu. Schemat serwomechanizmu został przedstawiony na rys. 2.
Różnica pomiędzy sygnałem zadanym qr, a sygnałem regulowanym q, który w tym wypadku reprezentuje położenie, podawana jest na wejście regulatora. Regulator o określonym przez projektanta algorytmie regulacji (np. P, PI, PID) generuje sygnał sterujący. Sygnał ten poprzez konwertor kieruje prawidłową pracą silnika, czyli śledzeniem zadanej wartości położenia.
|
Zbigniew Piątek - Beckhoff Automation
 Jakie rozwiązania technologiczne stosowane są w oferowanych przez firmę serwonapędach? Czy wraz z urządzeniami oferowane jest oprogramowanie dedykowane? Jakie rozwiązania technologiczne stosowane są w oferowanych przez firmę serwonapędach? Czy wraz z urządzeniami oferowane jest oprogramowanie dedykowane?
Układy serwonapędów dostarczanych przez Beckhoff to rozwiązania modułowe, pozwalające dobrać konfigurację odpowiednią do danej aplikacji. Optymalizacja systemu jest możliwa zarówno jeśli chodzi o moc poszczególnych osi, jak również wykorzystanie odpowiedniego sprzężenia zwrotnego z silników serwo.
Fundamentalnym elementem w technologii sterowania ruchem jest dla nas system czasu rzeczywistego i oprogramowanie typu PC Based PLC/NC. Beckhoff przyjął też koncepcję integracji algorytmu sterowania napędami i innymi urządzeniami na bazie nadrzędnego sterownika i jednego środowiska programistycznego TwinCAT.
Oprogramowanie służy zarówno do parametryzacji serwonapędów, jak też realizacji wielozadaniowego układu sterowania. Wysoką funkcjonalność TwinCAT zawdzięcza dodatkowo dużej liczbie specjalizowanych bibliotek, takich jak edytor krzywek elektronicznych, osie FIFO, latająca piła (pływająca gilotyna) i szeregowi innych.
Jakie są nowości w zakresie układów z serwonapędami?
Przykładem z naszej oferty jest wykorzystanie Ethernetu czasu rzeczywistego jako wspólnej magistrali komunikacyjnej dla czujników, napędów i układów wejściowo-wyjściowych oraz przeniesienia części zadań z poziomu serwowzmacniacza na poziom jednostki sterującej CPU. Takie nowatorskie podejście eliminuje dotychczasowe „wąskie gardła” układów sterowania, pozwalając jednocześnie osiągnąć niespotykaną do tej pory szybkość reakcji układu. Uzyskać można bowiem możliwość realizację kompletnej pętli sterowania nawet dla 100 osi w czasie mniejszym niż 100µs !
Jak zmienia się w Pana ocenie rynek serwonapędów?
Klasyczne aplikacje, w których stosuje się serwonapędy to układy sterowania maszyn oraz linii technologicznych. Rynek ten rozwija się w ostatnich latach niezwykle intensywnie i można powiedzieć, że nadążamy w tym względzie za tendencjami ogólnoświatowymi. Jednocześnie wymagania stawiane układom wykonawczym i napędowym w tego typu systemach sprawiają, że zastosowanie typowych silników z przetwornicami częstotliwości traci moim zdaniem stopniowo rację bytu.
|