
Podstawowym dokumentem wymuszającym zapewnianie bezpieczeństwa robotów, podobnie zresztą jak innych maszyn stosowanych w przemyśle, jest dyrektywa maszynowa 2006/42/EC. Zgodnie z nią (i z odpowiednimi rozporządzeniami wprowadzającymi jej przepisy w krajach europejskich) maszyny i urządzenia stosowane w Unii Europejskiej muszą spełniać podstawowe wymagania w zakresie bezpieczeństwa wymienione w załączniku pierwszym do wymienionej dyrektywy. Zharmonizowane zostało z nią szereg norm, w tym m.in. PN-EN ISO 10218 oraz PN-EN ISO 13849-1. Ich spełnienie daje podstawy domniemywać, że dana maszyna spełnia również zasadnicze wymagania zawarte w dyrektywie maszynowej.
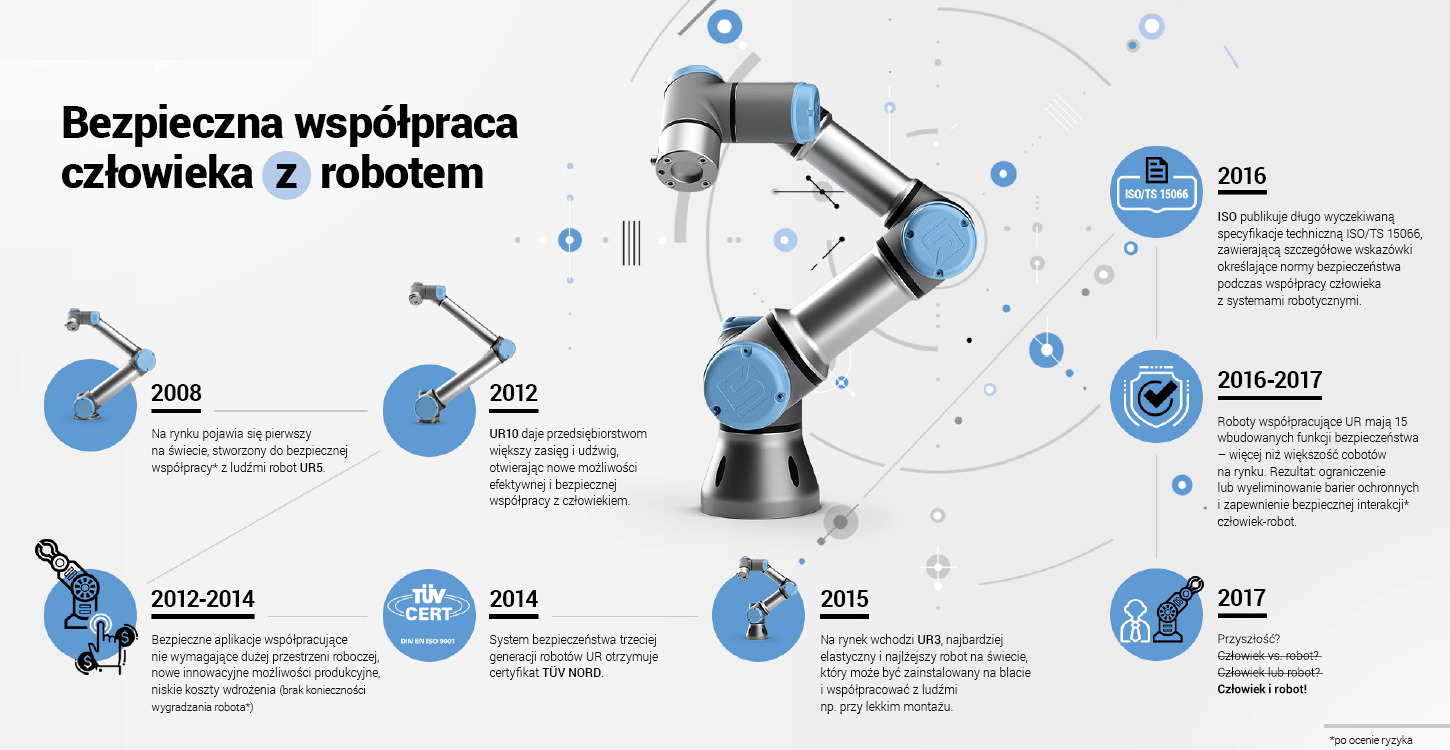 |
| Bezpieczna współpraca człowieka z robotem |
ISO/TS 15066
W lutym zeszłego roku normy ISO dla tradycyjnych robotów przemysłowych zostały wzbogacone o specyfikację techniczną odnoszącą się do wersji współpracujących. Międzynarodowa Organizacja Normalizacyjna (ISO) opublikowała nową specyfikacją ISO/TS 15066 wspierającą dokument PN-EN ISO 10218-1 Roboty i urządzenia dla robotyki - Wymagania bezpieczeństwa dla robotów przemysłowych - Część 1: Roboty oraz PN-EN ISO 10218-2 Roboty i urządzenia dla robotyki - Wymagania bezpieczeństwa dla robotów przemysłowych - Część 2: System robotowy i integracja. W specyfikacji zawarto wytyczne dotyczące zapewniania bezpieczeństwa podczas projektowania i wdrażania aplikacji zrobotyzowanych.
Nowy dokument został opracowany na podstawie opinii członków z 24 krajów. Prace nad ISO/TS 15066 rozpoczęły się w 2010 roku, zaś opublikowany wynik stanowi konsensus pomiędzy wszystkimi zainteresowanymi stronami.
Specyfikacja w praktyce
Co dokładnie zawiera ISO/TS 15066? Są to przede wszystkim wytyczne dotyczące oceny ryzyka podczas procesu instalacji i pracy robota współpracującego w określonym zastosowaniu. W szczególności podkreślono, aby nie tylko robot, ale cały system, który obejmuje narzędzia i elementy, z którymi robot ma kontakt, spełniał stosowne normy bezpieczeństwa.
Jeżeli chodzi o PN-EN ISO 10218-1, to najważniejszym z punktu widzenia bezpieczeństwa zastosowań robotów współpracujących jest dział 5.4 normy. Zdefiniowane w nim zostały wymagania względem systemów sterowania, które powinny być tak zaprojektowane, aby zapewniały zgodne z poziomem zapewniania nienaruszalności (poziomem zapewniania bezpieczeństwa, Performance Level) PL=d w kategorii 3, jak to określono w normie PN-EN ISO 13849-1 (dział 5.2.2 normy PN-EN ISO 10218-1), albo w taki sposób, aby były zgodne z określonym poziomem wykonania i oceną ryzyka (ISO 10218-1 sekcja 5.2.3). Kategoria 3 dotyczy dość powszechnych obecnie systemów konstruowanych z użyciem zabezpieczeń redundantnych (pojedynczy defekt nie prowadzi do utraty ich funkcji bezpieczeństwa).
Specyfikacja ISO/TS 15066 zawiera też cenne wskazówki związane z szacowaniem ryzyka, które przeznaczone są dla integratorów zajmujących się implementacją robotów współpracujących. Oszacowanie ryzyka jest całościowym procesem obejmującym analizę i ocenę ryzyka. Oznacza to identyfikację wszystkich rodzajów ryzyka i zmniejszenie ich do akceptowalnego poziomu (mówi o tym norma PN-EN ISO 12100). Ocena ryzyka ma szczególne znaczenie przy doborze właściwego rozwiązania zrobotyzowanego w przemyśle.
 |
 |
| Cobots Expert's Breakfast - jedno ze spotkań organizowanych w Warszawie cyklicznie przez Universal Robots; prelegentką jest Roberta Nelson Shea | |
Roberta Nelson SheaGlobal Technical Compliance Officer w Universal Robots |
Na bezpieczeństwo robotów patrzymy w sposób kompleksowy. Oszacowanie zagrożeń jest złożonym procesem, obejmującym takie aspekty jak analiza i ocena ryzyka. Oznacza to, że musimy zidentyfikować wszystkie rodzaje ryzyka i zmniejszyć je do akceptowalnego poziomu, zgodnie z wymaganiami normy PN-EN ISO 12100. Dodatkowo specyfikacja ISO/TS 15066 zawiera cenne wskazówki praktyczne przeznaczone dla integratorów zajmujących się implementacją cobotów. Bezpieczeństwo jest jednym z aspektów, który szczególnie niepokoi przedsiębiorców zastanawiających się nad wdrożeniem robotów współpracujących. Moją misją jest "odczarowanie" wszystkich kwestii wiążących się z ich użytkowaniem. Jestem zwolenniczką globalnej harmonizacji wymogów bezpieczeństwa, co pozwoli obniżać koszty tworzenia nowych modeli robotów, ich produkcji i dostosowywania do wymogów regulacyjnych.
Wielu przedsiębiorców żywi obawy i zastanawia się nad tym, na ile kosztowne jest dostosowanie obszaru, w którym działają roboty, do wymogów bezpieczeństwa. Jest to zagadnienie niezwykle istotne i Universal Robots przykłada do niego dużą wagę, dlatego też w ramach naszej organizacji działa specjalny zespół współpracujący z partnerami technologicznymi i ekspertami ds. bezpieczeństwa, którego rolą jest identyfikowanie potencjalnych usprawnień niezbędnych do dalszego ulepszania naszych produktów. Tworzone przez nas coboty mają aż 15 wbudowanych funkcji bezpieczeństwa, które zapewniają dużo wyższy poziom ochrony, niż ten opisany przez normy oraz dyrektywę maszynową. Sam system sterowania robotów UR zawiera osiem funkcji bezpieczeństwa: położenie i prędkość łącznie, położenie Robot tool-center-point, orientacja narzędzia, szybkość i siła, a także pęd i moc robota. Funkcje te można dostosować do wymogów użytkownika. |
Zbigniew Piątek

















