Określanie pozycji robotów mobilnych z wykorzystaniem skanerów laserowych LRF
Eksperyment i dyskusja
18 stycznia 2011
Głównym zadaniem skanera laserowego LRF (Laser Range Finder) jest umożliwienie robotowi mobilnemu omijania przeszkód oraz pozycjonowania się w określonej przestrzeni. W artykule przedstawiamy kompaktowy system pozycjonowania oparty o laserowy skaner do pomiaru odległości.
Jedną z korzyści opisywanej metody jest fakt, że niewykrycie istniejącego obiektu odbijającego nie wpływa na wynik. Jednakże rozpoznanie zwykłego obiektu jako punktu orientacyjnego powoduje błąd. Dlatego element refleksyjny musi być wykonany z materiału łatwego do odróżnienia od otoczenia. Sposobem jest przykładowo stworzenie obiektu o specyficznym kształcie. Jednakże tego typu podejście jest bardzo skomplikowane, ponieważ rozpoznanie kształtu wymaga znacznej mocy obliczeniowej i może prowadzić do błędu, jeżeli obiekt znajduje się w znacznej odległości.
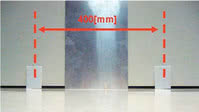
a) Porównanie pomiędzy specjalnym reflektorem a płytą ze stali nierdzewnej
b) Wynik skanowania
Rys. 8.
Skaner typu LRF mierzy odległość, wykorzystując czas przelotu światła lub przesunięcie fazowe. W tego typu pomiarze intensywność światła zależy od odległości oraz od materiału odbijającego i właśnie to szeroko wykorzystuje się do rozpoznawania obiektów za pomocą LRF. W szczególności intensywność rejestrowanego poziomu oświetlenia jest podobna pomimo zmiany odległości, o ile kąt mieści się w zakresie od 0 do 45 stopni.
W przypadku materiału bezpośrednio odbijającego światło - np. metalu - poziom odbicia spada wraz ze wzrostem odległości, natomiast w przypadku lustra jest wysoka, jeżeli jest ono ustawione prostopadle do czujnika. Z tych powodów jako punkt orientacyjny wybrany został odpowiedni reflektor odbiciowy -
Rys. 9. Środowisko eksperymentu
Rys. 10. Pozycja i orientacja Pos-URG, dla których potwierdzono powtarzalność pomiaru
Jak widać, tylko reflektor jest wykrywany stabilnie, a stal nierdzewna nie jest wykrywana wcale. Od standardowego skanera Rapid-URG wykorzystany model różni się przede wszystkim zakresem pomiarowym. Standardowo wynosi on 5,6 m, a dla prezentowanego 12 m. Zdecydowanie większy zakres udało się uzyskać poprzez ograniczenie wykrywalności do specyficznego materiału. Pozostałe właściwości nie uległy zmianie.
3. Zapisywanie danych mapy
Dane mapy są zapisywane w pamięci Flash jednostki centralnej. W przyszłości będzie istniała możliwość wykonania wszystkiego poprzez standardową aplikację na PC, w której użytkownik będzie mógł podać pozycję i ułożenie reflektora za pomocą standardowego interfejsu użytkownika. Inną metodą będzie możliwość automatycznego wykrycia i zapisania pozycji reflektorów.
EKSPERYMENT I DYSKUSJA
Opisywane rozwiązanie zostało zaimplementowane w Rapid-rURG, nazywanym w niniejszym eksperymencie Pos-URG. Powtarzalność wyników zaprezentowano na rysunku 9 i 10, a wyniki przedstawiono w tabeli 2. Na rysunku 10 widać, że wielokrotnie zmieniano pozycję i ułożenie czujnika. W czujniku zapisano 10 punktów orientacyjnych; 3 punkty orientacyjne były wykrywane w czasie około 2 milisekund.
Całkowity czas obliczeniowy został ograniczony poprzez wprowadzenie następujących kroków:
Dane zapisane w mapie są od razu posortowane ze względu na odległość.
Wyszukiwanie może zostać przerwane, jeżeli odległość jest większa od zakresu pomiarowego czujnika.
Tylko pierwsze przeszukiwanie, od momentu uruchomienia czujnika lub utraty informacji o własnej pozycji jest realizowane w pełnym wymiarze.
Pełne przeszukiwanie nie jest konieczne, jeżeli podana jest początkowa pozycja czujnika.
Jak wspomniano, proces przeszukiwania nie będzie wymagał dużo więcej czasu, nawet jeżeli liczba punktów orientacyjnych wzrośnie. Ponadto zaimplementowane przetwarzanie nie uwzględnia aproksymacji, jest to jednak możliwe za pomocą wewnętrznej funkcji, jeżeli nie wpłynie ona na pogorszenie dokładności pomiarów. W wyniku eksperymentu osiągnięto jeden z najważniejszych celów: CPU o stosunkowo niewielkiej mocy może przetwarzać zaimplementowany algorytm w czasie rzeczywistym.
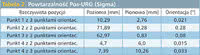
Tabela 2. Powtarzalność Pos-URG (Sigma)
Uzyskano również bardzo dobrą powtarzalność, co widać w tabeli 2. Pomimo że pozycja horyzontalna była niestabilna, wertykalna wykazywała zrównoważenie, a cel, czyli powtarzalność na poziomie 100 mm, został osiągnięty. Dla porównania dokładności powtarzalność została uzyskana pomimo zmiany liczby punktów orientacyjnych w pozycji czwartej. Logicznym wynikiem byłoby więc, gdyby mniejsza liczba punktów powodowała uzyskanie gorszej dokładności, jednakże przypadek dwóch elementów orientacyjnych był lepszy od sytuacji, gdy ustawiono trzy obiekty.
Domyślną przyczyną takiego wyniku może być kumulujący się błąd, co jednak należy potwierdzić w kolejnych badaniach. Ponieważ rzadkie i losowe rozmieszczenie punktów orientacyjnych znacząco wpływa na działanie algorytmu, w przyszłości konieczne jest stworzenie funkcji podpowiadającej ich rozmieszczenie. Potrzebna jest również automatyczna rejestracja danych mapy. Wielkość obecnie stosowanych reflektorów jest stosunkowo duża w celu zwiększenia możliwości ich wykrywania ze znacznej odległości. Jednakże nie w każdym otoczeniu można montować reflektory o dowolnej wielkości.
Dużym wyzwaniem jest również zwiększenie rozdzielczości kątowej, która powinna być przynajmniej czterokrotnie wyższa. Użycie Rapid-rURG ma plusy oraz minusy. Czujnik zastosowany w eksperymencie wykrywa tylko i wyłącznie specjalne reflektory, ale nie ma możliwości wykrywania przeszkód. W aplikacji można oczywiście zastosować dwa skanery, jednakże znacznie podniesie to koszty jej wdrożenia. Najlepszym wyjściem jest zaimplementowanie funkcji Rapid-rURG w standardowym czujniku wykrywającym przeszkody.
Hirohiko Kawata, Akihisa Ohya, Shin’ich Yuta tłumaczenie i adaptacja: Przemysław Degórski, kierownik działu doradztwa i sprzedaży WObit