Resolwery są używane od czasów II wojny światowej, kiedy były instalowane głównie w aplikacjach militarnych. Przetworniki te, określane też jako transformatory położenia kątowego, są zaprojektowane w taki sposób, by zachować funkcjonalność nawet w trudnych warunkach otoczenia (wysokie temperatury, wibracje, zapylenie). Dlatego od lat sprawdzają się także w przemyśle.
Czym jest Resolwer
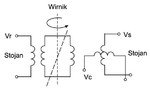
Rys. 1 Schemat resolwera
Resolwer w tradycyjnym wykonaniu składa się z uzwojonego wirnika i stojana. Uzwojenia wirnika wytwarzają zmienne pole magnetyczne, które indukuje napięcie w dwóch uzwojeniach stojana, które są względem siebie przesunięte o 90°. Napięcia indukowane w tych uzwojeniach są proporcjonalne do sinusa i kosinusa kąta obrotu (θ). W bezszczotkowych resolwerach stosuje się obrotowy transformator, który przekazuje energię między stojanem i wirnikiem. Eliminuje to szczotki i pierścienie ślizgowe oraz związane z nimi problemy. Uzwojenie pierwotne tego transformatora jest umieszczone na stojanie, natomiast uzwojenie wtórne – na wirniku (rys. 1).
Pomiar absolutny
Jeżeli napięcie doprowadzone do uzwojenia pierwotnego opisuje zależność: Vr=sin(ωt), to napięcia w uzwojeniach wtórnych wynoszą odpowiednio: Vs=Vr·tr·sin(θ) i Vc=Vr·tr·cos(θ). Współczynnik tr jest tzw. współczynnikiem transformacji resolwera i typowo wynosi 0,5. Każdemu kątowi przypisana jest jednoznaczna para wartości sinusa i kosinusa. Dlatego resolwer w przypadku obrotu o 360° dostarcza informacji o bezwzględnej pozycji wirnika. Jest to jedna z zasadniczych zalet tych przetworników np. w porównaniu do enkoderów inkrementalnych.
Przetwarzenie R/D
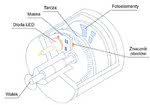
Rys.2 Główne elementy enkodera optycznego

Tabela 1. Porównanie technologii przetworników położenia kątowego
Następnie obliczana jest różnica sygnałów według podanej zależności. Wynikiem demodulacji tego sygnału jest sygnał proporcjonalny do różnicy θ‒δ. W zależności od tej wartości kąt δ, którego wartość jest przechowywana w liczniku, jest zwiększany lub zmniejszany, do momentu gdy różnica θ‒δ zostanie wyzerowana (przy założonej dokładności przetwornika R/D).
Enkodery optyczne
Konkurencyjnym rozwiązaniem dla resolwerów są enkodery optyczne. Dostarczają one układom sterowania informacji o prędkości, przesunięciu lub liczbie obrotów. Występują w dwóch zasadniczych konfiguracjach: jako enkodery inkrementalne (przetworniki obrotowo-impulsowe) i absolutne (przetworniki obrotowo‑ kodowe).
Montaż

Tabela 2. Enkodery – wybrane technologie i modele
Enkodery można podzielić też ze względu na sposób montażu. Spotykane są enkodery z osią i z otworem na oś (z tzw. pustym wałem). Enkodery z osią są łączone z wałem napędu za pomocą sprzęgła. Enkodery drugiego rodzaju są natomiast montowane bezpośrednio na osi napędowej. Wybierając ten rodzaj enkodera, należy zabezpieczyć obudowę przed ruchem obrotowym, wykorzystując pin blokujący. Przetworniki z otworem są jednak prostsze w montażu, ponieważ nie wymagają dodatkowych sprzęgieł i mocowania.
Budowa
Większość optycznych enkoderów (rys. 2) pracuje w oparciu o taką samą zasadę. Promienie świetlne przechodzą przez tarczę podziałową (z określoną liczbą jasnych i ciemnych pól) zamontowaną na wale obrotowym i padają na fotodetektor, który przetwarza impulsy świetlne na sygnał elektryczny.
Tarcza enkoderów optycznych jest wykonana ze szkła lub tworzywa sztucznego. Podziałki w takim wypadku są nanoszone na tarczę metodą napylania. Stosowane są też dyski metalowe z wytrawionymi działkami. Od liczby działek na tarczy zależy rozdzielczość enkoderów. Przy dzisiejszych możliwościach technologicznych w zakresie obróbki materiałów pozwala to osiągać dużą rozdzielczość pomiaru, która wyróżnia te enkodery na tle innych rozwiązań. W przypadku enkoderów inkrementalnych (przyrostowych) w zależności od liczby kanałów wyjściowych (ścieżek na tarczy) sygnały na wyjściu enkodera odzwierciedlają różne parametry.
Przetwornik resolwerowy Transolver
W Polsce produkcją przetworników resolwerowych zajmuje się m.in. firma Intec. Oferta w tym zakresie obejmuje np. przetwornik położenia kątowego Transolver. Jego głównym elementem pomiarowym jest resolwer. Sygnał pomiarowy z resolwera jest przeliczany i przetwarzany na prąd 4–20mA, który jest proporcjonalny do kąta odchylenia osi od punktu początkowego. Zakres pomiarowy można określić w przedziale 0°...40° (minimum) do 0°...360° (pełny obrót), z dowolnie ustalonym punktem początkowym i kierunkiem obrotu.
Najważniejsze elementy konstrukcyjne przetwornika to obudowa z końcówką do mocowania na gwincie, wodoodporna klawiatura membranowa z dwoma przyciskami i wyświetlaczem odpornym na wysokie i niskie temperatury, pokrywa tylna z szybką oraz ekranowany kabel o długości 0,5m. Wewnątrz znajduje się główny element pomiarowy oraz elektroniczny układ przetwarzania. Głównym zastosowaniem Transolvera jest współpraca z siłownikami nastawczymi układów regulacji automatycznej, gdzie pełni on rolę przetwornika pomiarowego sygnału sprzężenia zwrotnego. Przetwornik może jednak znaleźć zastosowanie także w innych aplikacjach (np. systemy radarowe, klimatyzacja).
|
Enkodery przyrostowe
Enkodery inkrementalne pozwalają mierzyć przemieszczenie kątowe (enkodery z jednym kanałem wyjściowym). Rozpoznają też kierunek ruchu. W takim przypadku na tarczy są dwa kanały wyjściowe z wzajemnie przesuniętymi działkami, co zapewnia przesunięcie fazowe o 90º między impulsami z obu kanałów. Kierunek obrotu można określić w zależności od tego, z którego kanału sygnał jest opóźniony. Zasadnicza różnica między resolwerami i enkoderami inkrementalnymi polega na tym, że pierwsze z wymienionych przetworników określają bezwzględną pozycję. W przypadku enkoderów bezpośrednio jest śledzony jedynie ruch przyrostowy.
Natomiast pozycja bezwzględna jest określana za pomocą dodatkowego fotoelementu, który odbiera impuls świetlny raz w czasie pojedynczego obrotu (enkodery z trzema kanałami wyjściowymi). Jednak jeżeli zasilanie zostanie odłączone, wszystkie informacje są tracone. Po ponownym doprowadzeniu zasilania nie jest znane bezwzględne położenie, do momentu gdy enkoder ponownie przejdzie przez pozycję odniesienia. Aplikacje wymagające określenia bezwzględnej pozycji narzucają konieczność zastosowania bardziej złożonych i droższych enkoderów absolutnych.
Enkodery absolutne
Zasadniczym elementem enkoderów tego rodzaju jest tarcza z naniesionym kodem, najczęściej kodem Graya. Wynik pomiarów enkoderów absolutnych ma postać słowa kodowego odpowiadającego przesunięciu (np. w przypadku enkoderów z wyjściem SSI). Enkodery absolutne są powszechnie wykorzystywane w aplikacjach, gdzie informacja o dokładnej pozycji jest czynnikiem krytycznym ze względu np. na bezpieczeństwo.
Po odłączeniu zasilania enkoder absolutny zachowuje bowiem informację o pozycji, nawet jeżeli w tym czasie została ona zmieniona. Aktualna pozycja może być poprawnie odczytana po ponownym uruchomieniu urządzenia. Enkodery absolutne można podzielić na dwie grupy: jedno- i wieloobrotowe. Czujniki pierwszego rodzaju dostarczają jedynie informacji na temat położenia w obrębie jednego obrotu, nie wskazując, ile takich obrotów zostało wykonanych. Enkodery wieloobrotowe dostarczają także informacji o liczbie obrotów.
Resolwerowy pozycjoner siłowników pneumatycznych
Najważniejsze elementy pozycjonera Spiroster-07, zamknięte w strugo- i pyłoszczelnej obudowie, to bezstykowy układ pomiaru położenia kątowego, piezoelektryczny przetwornik elektropneumatyczny, mikroprocesorowy układ sterowania oraz panel ustaw i sterowania lokalnego. Dodatkowo pozycjoner może być wyposażony w manometry kontrolne. Są też stosowane różne zestawy mocujące do jarzma napędu w zależności od rodzaju siłownika. Pomiar położenia jest realizowany przy użyciu resolwera i w przypadku siłowników liniowych polega na pomiarze bezwzględnego kąta wychylenia dźwigni, odniesionego do jej poziomego położenia. Układ elektroniczny wyznacza położenie siłownika zgodnie z tangensem kąta wychylenia dźwigni.
Pomiar położenia siłowników obrotowych jest mierzony bezpośrednio, jako kąt wychylenia osi pozycjonera. Zadane położenie siłownika jest porównywane z wynikiem pomiaru. Na tej podstawie układ sterowania wyznacza sygnał sterujący piezoelektrycznym przetwornikiem elektropneumatycznym. W pozycjonowaniu jest wykorzystywany algorytm Fuzzy-PID (zmienne nastawy regulatora PID w zależności od położenia i zmian dynamiki siłownika). Pozycjoner Spiroster-07 jest przeznaczony do montażu na siłownikach pneumatycznych jednostronnego działania o ciśnieniu zasilania do 600kPa. Jest on stosowany m.in. jako integralna część pneumatycznych membranowych wielosprężynowych siłowników typu P5/R5 firmy ZA Polna S.A.
|
Słabe punkty
Przewagą resolwerów nad enkoderami optycznymi pozostaje wytrzymałość na długotrwałą pracę w wysokich temperaturach. Słabym punktem enkoderów tego typu są wbudowane elementy półprzewodnikowe wykorzystywane do wzmacniania i formowania sygnału wyjściowego, które są wrażliwe na wysokie temperatury. W resolwerach ten problem nie występuje, ponieważ sama konstrukcja przetwornika nie wymaga stosowania elementów wrażliwych na temperaturę. Przetwornik R/D nie jest bowiem integralną częścią resolwera, a jedynie dodatkowym, chociaż niezbędnym, układem przetwarzania.
Problemem są też procesy starzeniowe wpływające na wydajność diod LED stosowanych w enkoderach jako źródła światła. Rezultatem tego niekorzystnego zjawiska jest mniejszy poziom sygnału wyjściowego. To, np. w przypadku enkoderów inkrementalnych, z czasem powoduje, że przesunięcie fazowe między kanałami jest również mniejsze. Wówczas występują trudności z detekcją kierunku obrotu. Ten problem jest przez niektórych producentów rozwiązywany za pomocą specjalnych elektronicznych obwodów kompensacji starzenia. Takie rozwiązanie jest implementowane np. w enkoderach firmy Kubler.
Przetworniki drogi z kołem pomiarowym

Tabela 3. Serie przetworników z kołem pomiarowym w ofercie firmy Wobit
Przetworniki obrotowo-impulsowe są stosowane w pomiarach długości w różnych aplikacjach np. w podajnikach papieru, przy cięciu różnych materiałów. Do pomiaru długości przewijanych materiałów są używane enkodery z osią i kołem pomiarowym. Na osi przetwornika optoelektronicznego założone jest w takim przypadku koło (lub dwa) o określonej średnicy. Przy danej rozdzielczości enkodera pozwala to wyznaczyć długość materiału.
W układach przetworników tego rodzaju ważny jest dobór materiału, którym pokryte jest koło pod kątem właściwości mierzonego obiektu. Aby uzyskać odpowiedni kontakt i wyeliminować poślizg między kołem pomiarowym i mierzonym materiałem, stosuje się pokrycie kół silikonem lub gumą. Enkodery z kołem pomiarowym oferuje m.in. firma Wobit (patrz tabela).
|












