
Wzorcowanie, czyli inaczej kalibracja, to według definicji zbiór czynności, których celem jest ustalenie relacji pomiędzy wartościami wielkości mierzonej, wskazanymi przez przyrząd pomiarowy, a tymi realizowanymi przez wzorce jednostki miary. Na przykładzie czujników do pomiaru temperatury przedstawiamy wybrane metody kalibracji oraz urządzenia potrzebne do jej realizacji.
Wybór ten jest nieprzypadkowy - temperatura jest bowiem jedną z wielkości fizycznych najczęściej mierzonych w przemyśle. Charakteryzuje ona przebieg procesów produkcyjnych, jak też stan maszyn (ich przegrzewanie się często świadczy o awarii). W pomiarach temperatury często korzysta się z czujników kontaktowych, np. sensorów rezystancyjnych oraz termopar. W przypadku obiektów w ruchu, pomiarów w miejscach trudno dostępnych albo w przypadku bardzo gorących urządzeń używa się natomiast mierników bezkontaktowych (pirometry, kamery termowizyjne).
METODA PUNKTÓW STAŁYCH I METODA PORÓWNAWCZA
Za najdokładniejszy sposób wzorcowania kontaktowych  Po przykładach spójrzmy bliżej na kwestie związane z przepisami. Do wykonania wiarygodnego wzorcowania niezbędny jest zatem odpowiedni sprzęt, wzorce oraz wykwalifikowany personel, który będzie przestrzegać procedur kalibracji, a później poprawnie opracuje jej wyniki. Wykonanie tego zadania często najlepiej jest zlecić specjalistom z laboratorium akredytowanego. Jak można przeczytać na stronie internetowej PCA (Polskiego Centrum Akredytacji) zgodnie z normą PN-EN ISO/IEC 17000 pt. Ocena zgodności.
Po przykładach spójrzmy bliżej na kwestie związane z przepisami. Do wykonania wiarygodnego wzorcowania niezbędny jest zatem odpowiedni sprzęt, wzorce oraz wykwalifikowany personel, który będzie przestrzegać procedur kalibracji, a później poprawnie opracuje jej wyniki. Wykonanie tego zadania często najlepiej jest zlecić specjalistom z laboratorium akredytowanego. Jak można przeczytać na stronie internetowej PCA (Polskiego Centrum Akredytacji) zgodnie z normą PN-EN ISO/IEC 17000 pt. Ocena zgodności.
Terminologia i zasady ogólne, akredytacja to atestacja przez stronę trzecią, dotycząca jednostki oceniającej zgodność, służąca formalnemu wykazaniu jej kompetencji do wykonywania określonych zadań w zakresie oceny zgodności. Aby uzyskać akredytację, laboratorium wzorcujące powinno spełnić szereg wymogów - m.in. każdy z upoważnionych pracowników musi co najmniej raz w ciągu ostatniego roku wykonać kalibrację metodami zgłoszonymi do akceptacji, a urządzenia pomiarowe oraz wzorce powinny być własnością laboratorium. Te pierwsze mogą być w wyjątkowych sytuacjach wynajmowane, jednak umowa najmu musi być zgodna z warunkami akredytacji i umożliwiać nadzór nad nią.
Wzorcowanie a legalizacjaWzorcowania nie należy utożsamiać z legalizacją. Ta druga to zespół czynności obejmujących sprawdzenie, stwierdzenie i poświadczenie dowodem legalizacji, że dany przyrząd pomiarowy spełnia wymagania. Może ona być pierwotna, wykonywana przed wprowadzeniem urządzenia do obrotu lub użytkowania albo ponowna, dla przyrządów już znajdujących się w obrocie albo w użytku. Legalizacja jednostkowa to natomiast legalizacja pierwotna urządzenia, które zostało skonstruowane do jednego, szczególnego zastosowania. W dowodzie legalizacji nie ma informacji o błędach pomiarowych ani o ich niepewności. W przeciwieństwie do wzorcowania, legalizacja nie jest też dobrowolna. Jej obowiązkowość jest uregulowana w Rozporządzeniu Ministra Gospodarki z 2007 roku w kwestii typów urządzeń pomiarowych, które podlegają prawnej kontroli metrologicznej i zakresu tej kontroli. Tylko legalizacja pierwotna jest wymagana na przykład w wypadku areometrów szklanych (alkoholomierzy, densymetrów do alkoholu i innych cieczy) i przeliczników do gazomierzy. Konieczność legalizacji pierwotnej i ponownej jest z kolei obowiązkowa m.in. dla: odważników, analizatorów spalin samochodowych, ciepłomierzy, gazomierzy, liczników energii elektrycznej, przyrządów do pomiaru długości i wag automatycznych. |
JAK UZYSKAĆ AKREDYTACJĘ?
Procedury wzorcowania powinny być znormalizowane. Te własne, które należy opracować zgodnie z aktualnym stanem wiedzy w danej dziedzinie, trzeba natomiast walidować.
Proces uzyskiwania akredytacji przebiega wieloetapowo. Rozpoczyna się od sprawdzenia dokumentacji. Ocenie w PCA poddawana jest ta dotycząca systemu zarządzania wdrożonego w laboratorium oraz procedur technicznych. Po jej zatwierdzeniu przedstawiciele w siedzibie wnioskodawcy akredytacji weryfikują teoretyczne i praktyczne kompetencje personelu w zakresie wykonywania kalibracji, opracowywania wyników i ich sprawdzania oraz przygotowania, modyfikacji i walidacji procedur pomiarowych.
Ponadto laboratorium musi "udowodnić", że może przeprowadzać wzorcowania w deklarowanym zakresie pomiarowym i z określoną zdolnością pomiarową. Ta ostatnia to najmniejsza niepewność pomiaru, jaką można osiągnąć podczas rutynowo wykonywanego wzorcowania. Analizowane są również wyniki porównań międzylaboratoryjnych.
Przyznana akredytacja jest nadzorowana i poddawana okresowej ocenie przez PCA. Można się także ubiegać o rozszerzenie jej zakresu.
ŚWIADECTWO JEST DOWODEM WZORCOWANIA
Rys. 1. Wzór świadectwa wzorcowania
Wniosek taki, tj. dotyczący rozszerzenia zakresu, może dotyczyć m.in. nowej dziedziny albo poddziedziny wzorcowania, lokalizacji lub metody pomiarowej. W pierwszym wypadku proces akceptacji przebiega analogicznie, jak przy udzielaniu akredytacji, czyli najpierw sprawdzana jest dokumentacja, a następnie przebieg kalibracji PCA weryfikuje na miejscu. W wypadku nowelizacji metody pomiarowej wymagane bywa z reguły tylko przedstawienie jej zaktualizowanej specyfikacji.
PCA ma także prawo do zawieszenia akredytacji, w całości albo częściowo. Przykładowe powody takiej decyzji to brak udokumentowania wzorcowań w określonej dziedzinie wykonywanych przez każdego upoważnionego pracownika w ciągu ostatniego roku lub utrata kompetencji laboratorium do prowadzenia wzorcowań w danej dziedzinie albo według określonej procedury.
Potwierdzeniem kalibracji jest jej świadectwo, które laboratorium akredytowane powinno wystawić klientowi. Dokument ten musi być zgodny ze wzorem zamieszczonym przez PCA na stronie internetowej www.pca.gov.pl/doc/swiadectwo_wzorcowania_pl.pdf. Wszelkie zmiany w tym szablonie powinny uzyskać akceptację tej organizacji.
CO ZAWIERA ŚWIADECTWO WZORCOWANIA?
Na świadectwie powinny znaleźć się dane teleadresowe laboratorium akredytowanego, informacje o akredytacji (jej numer AP XXX, przez kogo została wydana), data wystawienia oraz numer tego dokumentu. W dalszej części zamieszcza się opis przedmiotu wzorcowania, tzn. m.in. nazwę, typ, numer fabryczny i nazwę producenta przyrządu pomiarowego.
Kolejne dwa punkty to: zgłaszający oraz użytkownik. Dane identyfikujące tego drugiego (nazwa, adres) podaje się, jeżeli nie jest on tożsamy z pierwszym. Taka sytuacja może mieć miejsce, jeśli wzorcowanie przyrządu zamawia jego producent w ramach umowy z użytkownikiem końcowym czujnika. Następnie wskazać trzeba miejsce wzorcowania, o ile nie jest to siedziba laboratorium. Pole to wypełnia się w wypadku, gdy usługa kalibracji świadczona jest na miejscu u klienta. Jeśli któryś z tych dwóch punktów ma pozostać pusty jego tytułu w ogóle nie należy umieszczać na świadectwie.
Dalej trzeba opisać warunki środowiskowe, które występowały w czasie wzorcowania oraz datę kalibracji. Po tych polach zamieszcza się oświadczenie o dochowaniu przez laboratorium akredytowane spójności pomiarowej.
SPÓJNOŚĆ POMIAROWA - CO TO ZNACZY?
Spójność pomiarowa to właściwość wyniku pomiaru lub wzorca jednostki miary, która polega na tym, że można powiązać go z określonymi odniesieniami, na ogół z wzorcami państwowymi albo międzynarodowymi jednostkami miary za pośrednictwem nieprzerwanego łańcucha porównań, z których wszystkie mają określoną niepewność. Jeżeli jest ona zapewniona, wyniki pomiarów są jednoznaczne, co umożliwia ich wzajemne porównywanie.
Utrzymaniem państwowych wzorców jednostek miar w Polsce zajmuje się Główny Urząd Miar. Przykładem jest wzorzec jednostki miary stałego napięcia elektrycznego. Ma on postać układu pomiarowego złożonego ze wzorca pierwotnego opartego na zjawisku Josephsona ze złączem o napięciu znamionowym 10 V oraz systemu pomiarowego do kontroli charakterystyk i kalibracji.
Wzorzec jednostki miary oporu elektrycznego to natomiast układ pomiarowy w postaci grupy sześciu oporników wzorcowych o wartości nominalnej 1 Ω znajdujących się w termostacie i komparatora prądowego. GUM dysponuje także wzorcem jednostki masy 1 kg - jest to walec wykonany ze stopu platyny z irydem (90% Pt, 10% Ir) o średnicy podstawy równej z jego wysokością. Więcej informacji o innych jednostkach odniesienia można znaleźć na stronie internetowej www.gum.gov.pl.
Adiustacja ≠ kalibracjaAdiustacja to czynność mająca na celu doprowadzenie przyrządu pomiarowego do stanu działania odpowiadającego jego przeznaczeniu. Przykładem jest jego zerowanie. Adiustacji nie należy mylić z kalibracją, która jest z kolei synonimem wzorcowania! |
JAK SIĘ OBLICZA NIEPEWNOŚĆ POMIARU?
Kolejnym punktem na świadectwie wzorcowania jest informacja o tym, że na kolejnych stronach dokumentu podano wyniki kalibracji razem z wartościami niepewności pomiaru. Jeżeli zlecenie przewidywało jedynie sprawdzenie, czy przyrząd pomiarowy spełnia wymagania metrologiczne określone w przepisach, normach albo w innych zaleceniach, potwierdzenie zgodności zastępuje wyniki wzorcowania.
Niepewność pomiaru charakteryzuje rozrzut wartości, które można przypisać wielkości mierzonej. Ta podawana w świadectwach kalibracji to niepewność rozszerzona obliczana jako wynik mnożenia złożonej niepewności standardowej pomiaru wielkości wyjściowej i współczynnika rozszerzenia k. Zwykle w czasie wzorcowania spełnione są warunki, które pozwalają na przyjęcie k = 2 (rozkład normalny wielkości mierzonej, wiarygodność niepewności standardowej). Odpowiada to poziomowi ufności około 95%.
Niepewność pomiaru należy obliczać oraz podawać w świadectwie wzorcowania (maksymalnie do dwóch miejsc po przecinku) zgodnie z ujednoliconymi wytycznymi zawartymi w dokumencie EA-4/02 pt. Wyrażanie niepewności pomiaru przy wzorcowaniu udostępnianym przez GUM. W oparciu na nim, na przykładach wzorcowań multimetru cyfrowego, opornika odniesienia, kalibratora temperatury i odważnika przedstawiamy dalej różne źródła niepewności cząstkowej, które składają się na złożoną niepewność pomiaru.
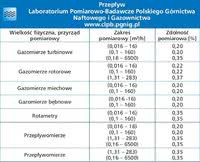
Gdzie wzorcować przyrządy pomiarowe?Poniżej przedstawiamy przykładowe oferty laboratoriów akredytowanych w zakresie wzorcowania przyrządów pomiarowych wybranych wielkości elektrycznych i nieelektrycznych. Lista wszystkich jednostek tego rodzaju przydostępna jest na stronie internetowej PCA www.pca.gov.pl. Można na niej skorzystać z wyszukiwarki według m.in. numeru akredytacji (AP), nazwy laboratorium, miasta, dziedziny lub obiektu kalibracji.
|



PRZYKŁAD 1 - WZORCOWANIE MULTIMETRU CYFROWEGO
Aby obliczyć błąd wskazań Ex multimetru cyfrowego wzorcowanego z wykorzystaniem kalibratora, należy skorzystać z następującej zależności:
Ex = Uix - Us + ΔUix - ΔUs,
gdzie: Uix to wartość napięcia wskazana przez ten przyrząd, Us - wartość napięcia wytworzonego przez kalibrator, ΔUix - poprawka wskazanej wartości napięcia spowodowana określoną rozdzielczością wskazań multimetru cyfrowego, a ΔUs - poprawka wartości napięcia wzorca uwzględniająca m.in. jego dryft od czasu ostatniego wzorcowania kalibratora, zsumowany wpływ: odchylenia w stanie ustalonym, nieliniowości i zmian współczynnika wzmocnienia, zmiany temperatury otoczenia i napięcia zasilania oraz wpływ obciążenia, tzn. rezystancji kalibrowanego multimetru.
PRZYKŁAD 2 - KALIBRACJA REZYSTORA WZORCOWEGO
Rezystor odniesienia wzorcuje się, porównując wartość jego rezystancji z wartością dla innego rezystora kontrolnego o takiej samej rezystancji nominalnej przy użyciu dokładnego multimetru cyfrowego. Rezystory powinny znajdować się w takiej samej temperaturze. Można je w tym celu na przykład umieścić w kąpieli z medium o monitorowanej i regulowanej temperaturze.
Rezystancja opornika badanego Rx jest wyznaczana z równania:
Rx = (Rs + ΔRd + ΔRts)·r·rc - ΔRtx,
gdzie: Rs to rezystancja wzorcowego opornika, ΔRd - jej dryft od ostatniego wzorcowania, ΔRts - zmiana rezystancji opornika odniesienia spowodowana zmianą temperatury, r - iloraz rezystancji opornika wzorcowanego do rezystancji wzorca, rc - współczynnik poprawkowy na napięcie pasożytnicze i rozdzielczość przyrządu, a ΔRtx - zmiana rezystancji opornika badanego pod wpływem temperatury.
Jak wyznaczyć niepewność pomiaru wielkości wejściowych?W tym celu korzysta się z metody typu A albo metody typu B. W tej pierwszej niepewność standardowa jest odchyleniem standardowym eksperymentalnym średniej otrzymanej metodą uśredniania albo odpowiednią analizą regresji. Stosuje się ją wtedy, gdy istnieje możliwość przeprowadzenia w identycznych warunkach pomiarowych wielu niezależnych obserwacji jednej z wielkości wejściowych. W metodzie typu B niepewność jest obliczana innym sposobem niż analiza statystyczna serii obserwacji. Powinien on być uzasadniony w danych warunkach pomiaru.
|
PRZYKŁAD 3 - WZORCOWANIE KALIBRATORA TEMPERATURY
Wzorcowanie kalibratora temperatury polega na wyznaczeniu temperatury otworu pomiarowego tego przyrządu z wykorzystaniem termometru wzorcowego, na przykład czujnika rezystancyjnego platynowego, którego opór mierzy się przy użyciu mostka prądu przemiennego. Pomiaru dokonuje się w stanie ustalonym, czyli wówczas gdy wewnętrzny termometr kalibratora wykaże osiągnięcie zadanej temperatury. Temperatura otworu roboczego tx jest sumą:
tx = ts + Δts + Δtd - Δtix + Δtr + Δta + Δth + Δtv,
gdzie: ts - temperatura wzorca, Δts - poprawka temperatury wzorca wynikająca z pomiaru jego rezystancji, Δtd - poprawka temperatury wzorca związana ze zmianą jego wartości od czasu ostatniego wzorcowania, Δtix - poprawka spowodowana błędem nastawienia kalibratora, Δtr - poprawka wynikająca z różnic temperatury między termometrem wbudowanym a wzorcem, Δta - poprawka uwzględniająca niejednorodność temperatury w otworze pomiarowym, Δth - poprawka wynikająca z histerezy wskazań, Δtv - poprawka związana ze zmianą temperatury podczas pomiaru.
PRZYKŁAD 4 - KALIBRACJA ODWAŻNIKA
Kalibracja odważnika o określonej wartości nominalnej polega na jego zestawieniu ze wzorcem o takiej samej wartości znamionowej przy użyciu komparatora masy. Ta pierwsza (mx) jest dalej obliczana jako suma: masy wzorca (ms) odczytanej z jego świadectwa wzorcowania, jej dryft u (ΔmD) oszacowanego na podstawie jego wcześniejszych wzorcowań, różnicy mas wzorca oraz odważnika badanego (Δm) i poprawek na niecentryczność, wpływy magnetyczne (Δmc) i wypór powietrza (ΔB):
mx = ms + ΔmD + Δm + Δmc + ΔB.
BILANS NIEPEWNOŚCI
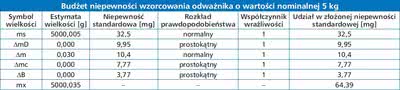
Dla każdego ze składników równań podanych w przykładach 1 do 4 wyznacza się niepewności standardowe (patrz ramka). Ich wartości trzeba następnie uwzględnić w bilansie niepewności. Każdej z nich powinno się przypisać współczynnik wrażliwości, który określa, w jakim stopniu zmiany estymaty wielkości wejściowej wpływają na estymatę wielkości wyjściowej. Iloczyn współczynnika wrażliwości i danej niepewności cząstkowej określa udział tej drugiej w złożonej niepewności standardowej pomiaru. Przykład bilansu niepewności dla przypadku wzorcowania odważnika o wartości nominalnej 5 kg przedstawiono w tabeli obok. Niepewność rozszerzona pomiaru dla k = 2 to:
U = 2 · 64,39 ≈ 128,78 mg
Wyznaczona masa odważnika wynosi zatem: 5,000035 kg ± 128,78 mg.
JAK CZĘSTO TRZEBA WZORCOWAĆ PRZYRZĄDY POMIAROWE?
Tematy numerów w APA - plan na kolejne miesiące
O częstości wzorcowań przyrządów pomiarowych, o ile inaczej nie stanowią odpowiednie normy lub przepisy, decydują ich użytkownicy. Aby mieć pewność, że ich wskazania wciąż są wiarygodne, najlepiej byłoby je kalibrować jak najczęściej. Z drugiej strony uwzględnić trzeba koszt tej usługi, zwłaszcza jeżeli korzysta się z wielu czujników. Częstość kalibracji powinna być więc tak dobrana, żeby nadmiernie finansowo nie obciążać zakładu, równocześnie zapewniając odpowiedni poziom bezpieczeństwa produkcji.
W praktyce oznacza to, że przyrządy pomiarowe, których błędy mogą mieć poważne, też finansowe, efekty, należy wzorcować częściej, podobnie jak te o mniejszej niepewności pomiaru oraz nowe. W wypadku tych ostatnich ułatwia to określenie dryft u ich wskazań spowodowanego starzeniem się. Typowy odstęp między kolejnymi kalibracjami czujników w przemyśle mieści się między 12 a 24 miesiącami.
Monika Jaworowska
W artykule wykorzystano informacje podane m.in. przez GUM oraz PCA.
















