AGV i roboty współpracujące
Rynek robotów mobilnych i współpracujących powoli wchodzi w fazę dojrzałości. Wzrosty sprzedaży nie są już tak imponujące jak jeszcze kilka lat temu, rozwinęła się też konkurencja, bowiem w branży pojawili się kolejni dostawcy. Rynek ten omawialiśmy w IRA już kilkukrotnie, stąd w bieżącej analizie skupiamy się na ważnych, powiązanych z nim tematach technologicznych. Oczywiście korzystamy tu z sugestii i opinii dostawców – respondentów redakcyjnej ankiety.
Coboty – nowości technologiczne
Wśród nowości technologicznych wymienianych przez respondentów odnośnie do robotów współpracujących wyróżniają się: dodatkowe funkcje bezpieczeństwa, poprawa parametrów IP, większe możliwości operowania dzięki robotom siedmioosiowym, doskonalsze systemy wizyjne, zdalne monitorowanie stanu robotów oraz dodatkowe funkcje integrujące te maszyny z siecią i innymi urządzeniami działającymi w zakładzie.
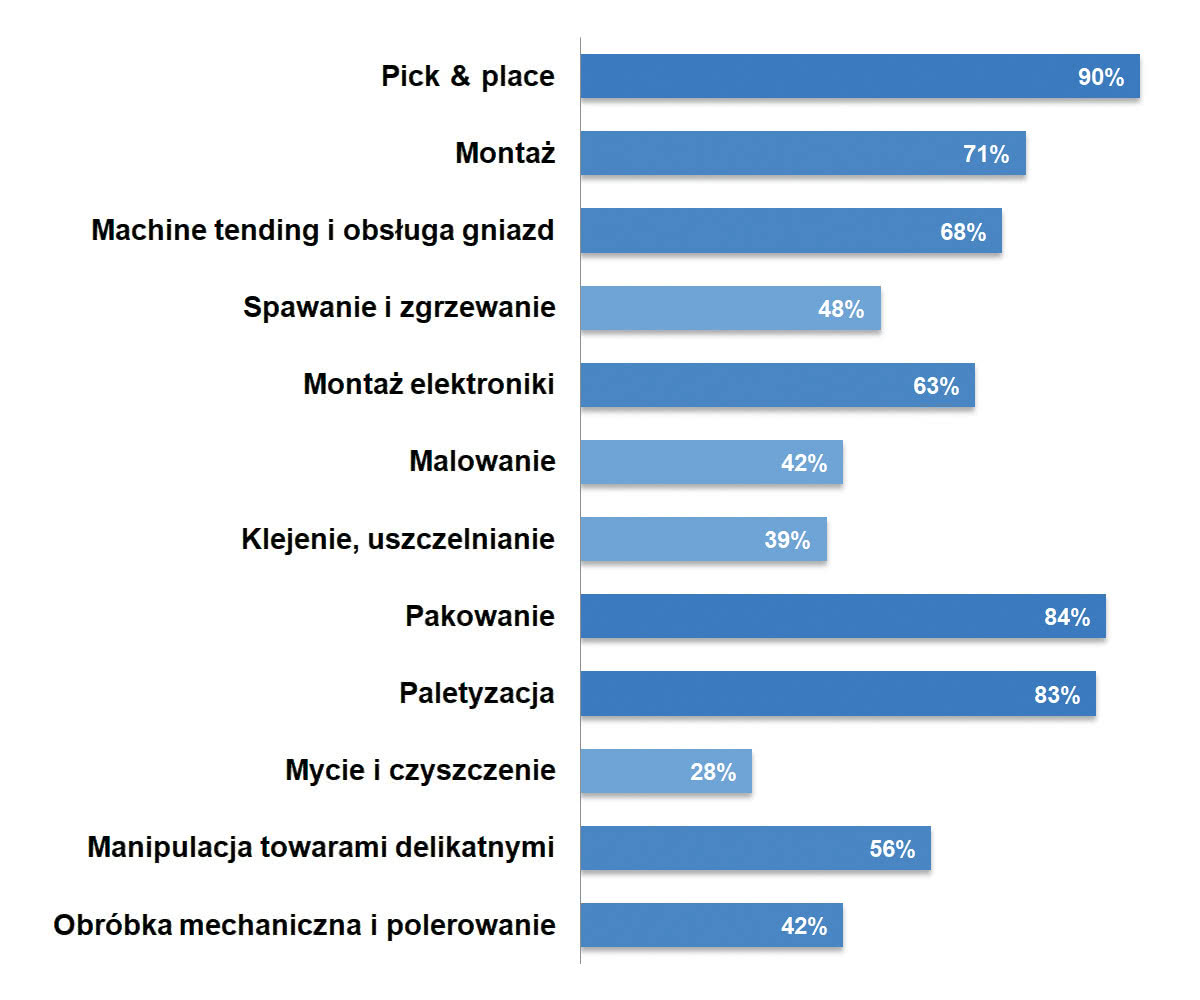
Najczęstsze aplikacje robotów współpracujących
Sławomir Kowalski
Bosch Rexroth
- Jakie są cechy charakterystyczne cobotów?
Roboty współpracujące mają wiele znaczących cech odróżniających je od tradycyjnych robotów przemysłowych. Przede wszystkim chodzi o bezpieczeństwo, jakie zapewniają one w interakcji z człowiekiem. Postęp technologiczny i zastosowane systemy bezpieczeństwa sprawiły, że pracownik może bezpiecznie współpracować z takim robotem. Warto również zaznaczyć, że coboty cechuje bardzo duża elastyczność w dostosowaniu się do warunków produkcyjnych. W przeciwieństwie do robotów przemysłowych, zmiana miejsca pracy i przeprogramowanie cobota jest możliwe w bardzo krótkim czasie, nawet bez angażowania wykwalifikowanych automatyków.
- Jak dobrać robota współpracującego?
Przy wyborze konkretnego rozwiązania warto dokonać wstępnej analizy potrzeb produkcyjnych i warunków tam panujących. Czynności wymagające ciągłej i powtarzalnej pracy to najlepsze miejsca, w których można wykorzystać takie maszyny. Cobot idealnie sprawdzi się we współpracy z centrami obróbczymi i maszynami CNC – w podawaniu i odbieraniu elementów z obrabiarki, a także w aplikacjach pakowania produktów do opakowań zbiorczych i paletyzowaniu.
- Jak istotne są kwestie wsparcia ze strony dostawcy i serwisu?
Ostatnią kwestią związaną z inwestycją w robota współpracującego jest jego uruchomienie na linii produkcyjnej oraz gwarancja i serwis posprzedażowy. O ile gwarancja jest sprawą uregulowaną prawnie, o tyle serwis i uruchomienie robota pozostają kwestią, o której kupujący powinien rozmawiać z dostawcą. Uruchomienie samego robota nie jest trudne. To sprawy związane z podłączeniem robota do linii produkcyjnej i współpracy w cyklu produkcyjnym mogą być problematyczne. Dlatego, biorąc pod uwagę zakup robota, konieczne jest przeanalizowanie swojej decyzji pod kątem współpracy wybranego rozwiązania z linią produkcyjną.
|
1. Funkcje bezpieczeństwa
Coboty od samego początku swojego istnienia miały cechy i wyposażone były w funkcje, które miały za zadanie zmniejszyć potencjalne zagrożenia przez nie stwarzane. Funkcje te obejmują: sprzężenie zwrotne siły, monitorowanie prędkości, a także zastosowanie serwomotorów o niskiej bezwładności i technologii wykrywania kolizji, która ogranicza siłę robota do poziomów bezpiecznych w kontakcie z człowiekiem. Do tego doszły lekkie ramy, które minimalizują potencjalne skutki kolizji, zaokrąglone krawędzie i ograniczona liczba punktów zaciskania.
Współpraca robotów współpracujących z ludźmi lub wykorzystanie cobotów zamiast pracowników – w jakich aplikacjach jest najefektywniejsza, najczęstsza?
Norma bezpieczeństwa ISO 10218 i specyfikacja techniczna ISO/TS 15066 określają funkcje bezpieczeństwa i wydajność robota współpracującego. Zgodnie z ISO/TS 15066 monitorowanie siły oraz prędkości cobota są ustalane na podstawie cech aplikacji, obszaru kontaktu z człowiekiem i zagrożeń w miejscu pracy. Należy pamiętać, że dla ludzi znajdujących się w pobliżu robota. Wówczas cobot może relatywnie "bezpiecznie" zetknąć się z ciałem człowieka, nie powodując poważnych obrażeń. Otrzymując stałe informacje o wykrywanym ruchu, cobot może zareagować, zatrzymując się, jeśli on lub człowiek przekroczą ustalone dopuszczalne limity.
Najpopularniejsze zdaniem dostawców marki robotów współpracujących w Polsce; zestawienie nie dotyczy udziałów firm w rynku
Najnowsze laserowe skanery obecności człowieka mogą jeszcze bardziej ograniczać ryzyko wystąpienia zdarzeń niepożądanych. Jeśli taki skaner wykryje pracownika w obszarze działania robota, oprogramowanie automatycznie spowolni urządzenie lub całkowicie je zatrzyma. W miarę oddalania się pracownika ruch zostanie przywrócony, przywracając robota do pełnej prędkości i wydajności dopiero po całkowitym opuszczeniu przez człowieka obszaru roboczego.
2. Nowoczesne systemy wizyjne
Systemy wizyjne przeznaczone dla cobotów stają się niezbędnym wyposażeniem tych maszyn w coraz większej liczbie aplikacji. To właśnie "oczy" cobota pozwalają mu precyzyjnie i dokładnie wykonywać złożone zadania. Obecnie dostępnych jest wiele typów systemów wizyjnych, takich jak kamery 3D, systemy wizyjne 2D oraz 2,5D. Dobór właściwego rozwiązania zależy od rodzaju zastosowania. Kamery 2D są tańsze, ale mniej wszechstronne i o bardziej ograniczonych możliwościach w porównaniu do wersji 3D. Zazwyczaj kamery 2D pozwalają określić długość i szerokość obiektów. Z kolei kamery 3D dostarczają wszystkich informacji wizualnych, jakich może potrzebować robot, obejmując wszystkie trzy osie. Kamery 2,5D to technologia wypełniająca lukę pomiędzy rozwiązaniami 2D i 3D – zarówno pod względem kosztów, jak i możliwości. Urządzenia te są w stanie określić wysokość obiektów, co może być przydatne np. w zastosowaniach, w których przedmioty muszą być układane w stosach.
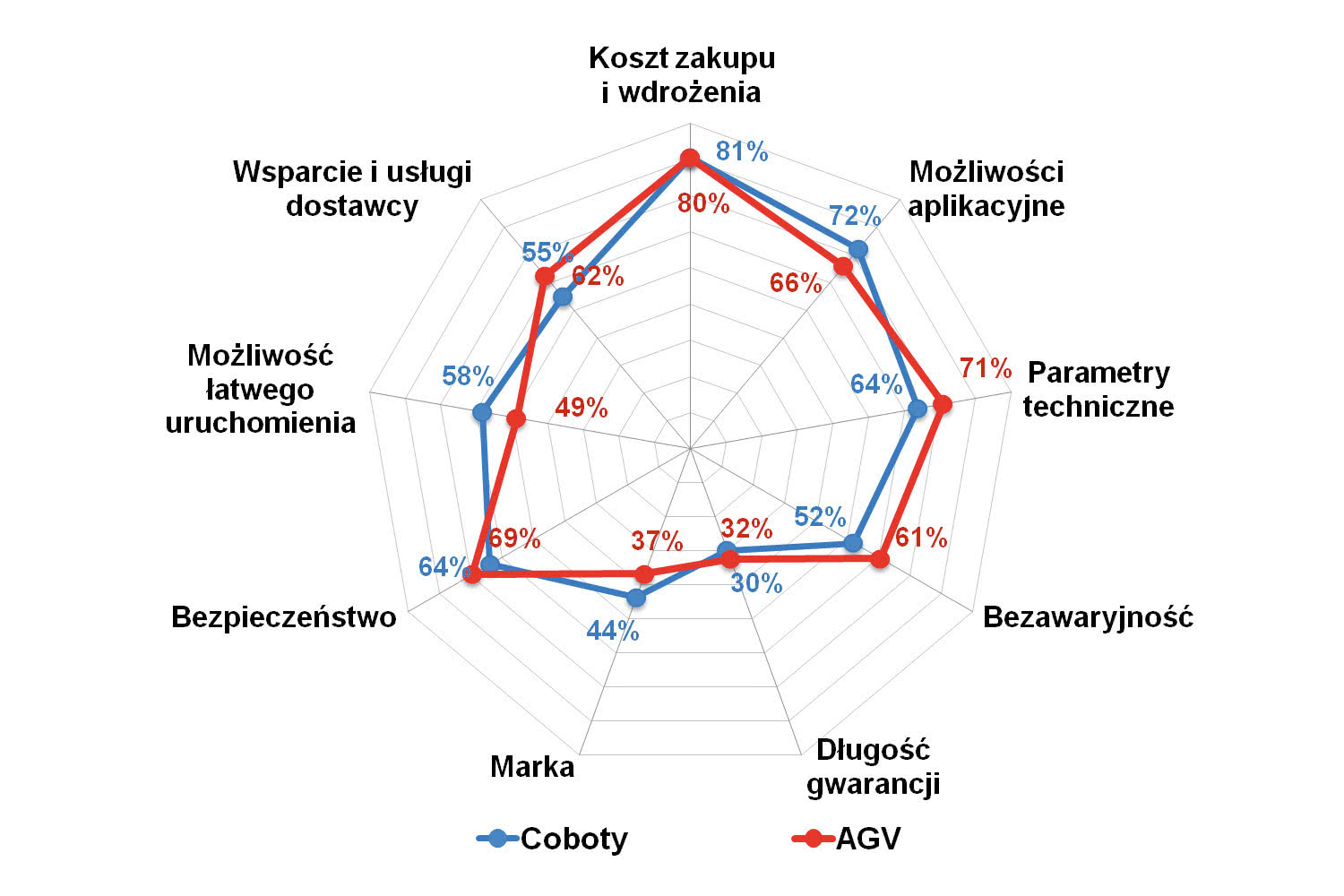
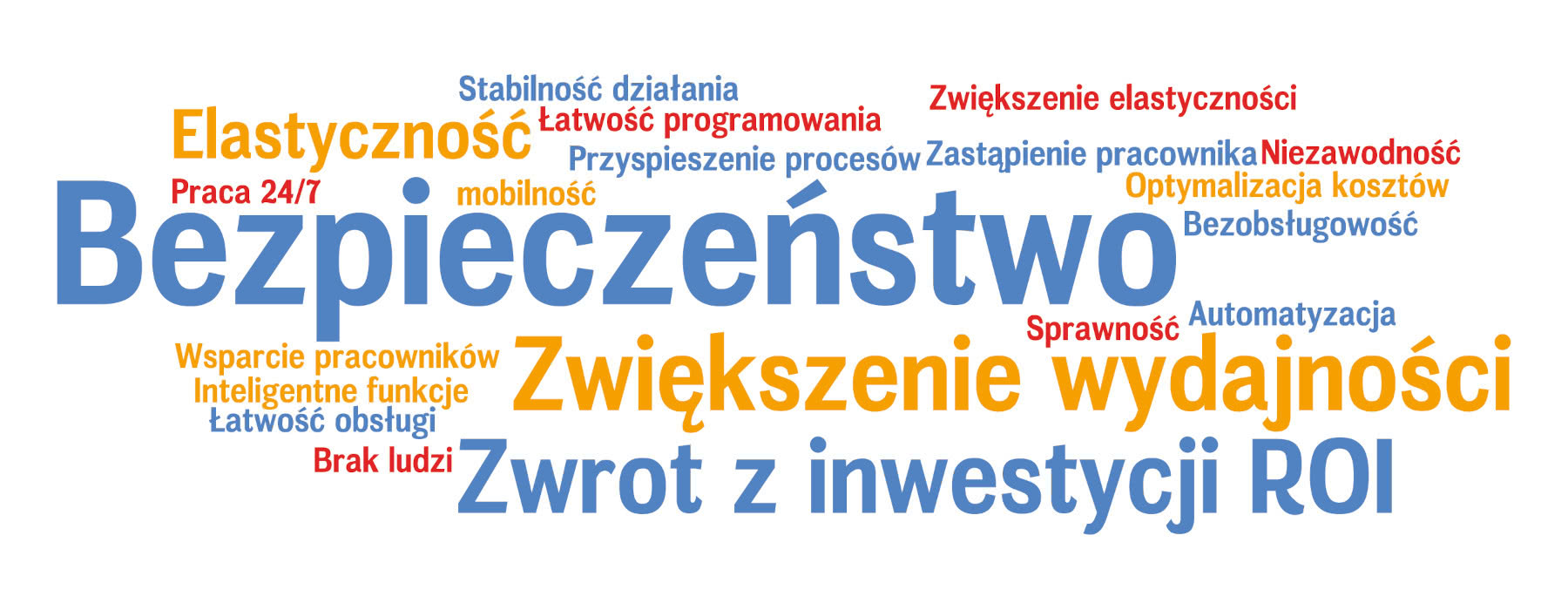
Najważniejsze dla krajowych odbiorców cechy cobotów i AGV
Uczenie maszynowe i sztuczna inteligencja pozwalają ramionom robotów coraz lepiej "widzieć" obiekty, rozróżniać je i wykonywać w obszarze roboczym czynności wymagające lokalizowania przedmiotów – np. podczas ich układania lub przemieszczania z miejsca na miejsce.
3. Zdalne monitorowanie stanu robota
W ostatnich latach, zwłaszcza w okresie pandemii, wyraźnie wzrosły możliwości pracy zdalnej z robotami współpracującymi. Zdalne monitorowanie, zdalne programowanie i dedykowane rozwiązania do serwisowania predykcyjnego robotów zapewniają użytkownikom końcowym liczne korzyści: od skrócenia przestojów i poprawy wydajności po wspieranie ciągłości biznesowej.
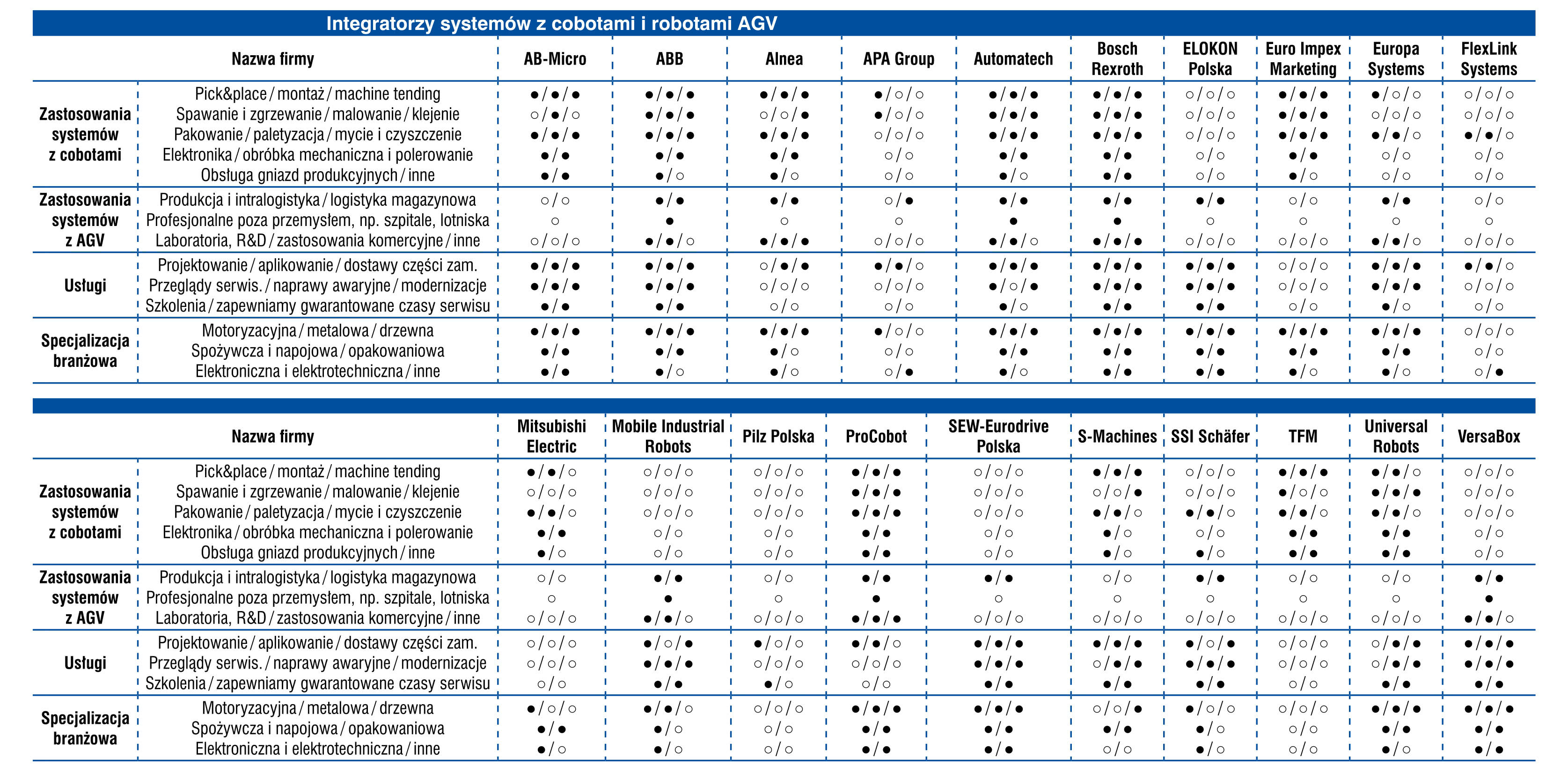
Oceny konkurencji w omawianych sektorach rynku krajowego
Narzędzia do zdalnego programowania i identyfikacji stanu cobota umożliwiają dostęp do urządzeń ze zdalnych lokalizacji za pośrednictwem laptopa, komputera lub smartfona. Korzyści ze zdalnego dostępu są oczywiste: wgląd przez 24 godziny na dobę poprawia ciągłość produkcji, skraca okres przestojów i eliminuje konieczność programowania robota w miejscu jego. Zdalny dostęp sprawia także, że koszty związane z usuwaniem usterek przez inżynierów są niższe.
Daniel Niepsuj
Universal Robots
- Jakie są najczęstsze zastosowania robotów współpracujących na naszym rynku? W których branżach zastępują one standardowe maszyny? Jakie są to firmy i aplikacje?
Zacznę od oczywistości: roboty współpracujące charakteryzują się tym, że ich zastosowanie jest niemalże nieograniczone – wszystko zależy od naszej wyobraźni. Widziałem wiele niestandardowych procesów, takich jak np. malowanie ścian, które coboty zautomatyzowały. Jednakże najczęstszymi robotyzowanymi zadaniami są: paletyzacja, obsługa maszyn oraz spawanie, o które pyta coraz więcej klientów. Wiąże się to przede wszystkim z brakiem wykwalifikowanych spawaczy na rynku pracy, ale także z wszechstronnością cobotów, które obsługują właściwie wszystkie typy spawania i cięcia. Roboty współpracujące występują w wielu branżach: motoryzacji, elektronice, produkcji stali i obróbce metali oraz w przemyśle farmaceutycznym i kosmetycznym czy spożywczym. Przykładowo w zakładzie Lipton Teas and Infusions w Katowicach wdrożono blisko 20 cobotów Universal Robots do automatyzacji paletyzacji na końcach linii produkcyjnych.
- Co zmieniają roboty współpracujące, szczególnie w kontekście robotyzacji w niewielkich przedsiębiorstwach? Jaka jest ich percepcja przez pracowników?
Przede wszystkim zwiększyły wydajność oraz poprawiły produktywność MŚP. Coboty mogą wykonywać swoje zadania 24 godziny na dobę, bez obniżenia jakości produktu. Idealnie realizują zadania powtarzalne, zazwyczaj niechętnie wykonywane przez pracowników, w tym niebezpieczne procesy wykonywane w trudnych warunkach, wymagające siły fizycznej i obciążające ludzki organizm. W ten sposób pracownicy mogą wykonywać zadania bardziej wartościowe i rozwijające.
Wielu użytkowników wspomina, że ich personel początkowo sceptycznie podchodził do robotów. Dziś te same osoby pytają swoich szefów o nowe wdrożenia w firmie – taki jest efekt współpracy z cobotami. Zatem MŚP robotyzacją poprawiają wydajność przedsiębiorstwa oraz podnoszą satysfakcję i morale pracowników.
|
Technologie robotów mobilnych
Wśród wskazanych przez respondentów nowości technologicznych dotyczących AGV najczęściej powtarzały się: większe możliwości współpracy we flocie i z pozostałymi maszynami, współpraca robotów różnych producentów oraz nawigacja SLAM.
1. Zarządzanie flotą pojazdów AGV
Od samego początku rozwoju koncepcyjnego tych urządzeń pojedyncze AGV łączone były w całe floty pojazdów. Początkowo umożliwiało to zastępowanie zadań poszczególnych jednostek w czasie ładowania ich akumulatorów, a obecnie uwzględnia się wiele różnych czynników, które należy brać pod uwagę przy optymalizacji działania posiadanych przez zakład robotów. Zarządzanie flotą pojazdów znajdujących się w ruchu jest jednak zadaniem bardziej złożonym niż administrowanie pojedynczymi robotami mobilnymi.
Oprogramowanie zajmujące się zarządzaniem flotą służy do przydzielania zadań (zleceń), które należy optymalnie przypisać do konkretnego AGV. Najprostszym sposobem rozwiązania tego problemu jest przydzielenie zadania do AGV znajdującego się najbliżej pozycji obiektu, którego zlecenie dotyczy. Po tym etapie kolejnym krokiem jest wyznaczenie najkrótszej ścieżki do miejsca docelowego – zaplanowanie ścieżki. Algorytmy wyznaczające optymalną ścieżkę wykorzystują cyfrową reprezentację otoczenia do wyszukiwania sekwencji ruchów pozwalających jak najszybciej osiągnąć cel. Ważne jest przy tym, aby pojazd AGV mógł odpowiednio nawigować w swoim środowisku, do czego niezbędna jest prawidłowa lokalizacja robotów mobilnych. Nawet jeżeli algorytm planowania ścieżki obliczył najkrótszą drogę dla AGV, nie oznacza to, że maszyna będzie mogła podążać tą ścieżką bez żadnych problemów. Konieczna jest jej ciągła adaptacja w czasie rzeczywistym, bowiem nieprzewidziany obiekt – inne pojazdy, roboty lub osoba mogą ścieżkę zablokować.
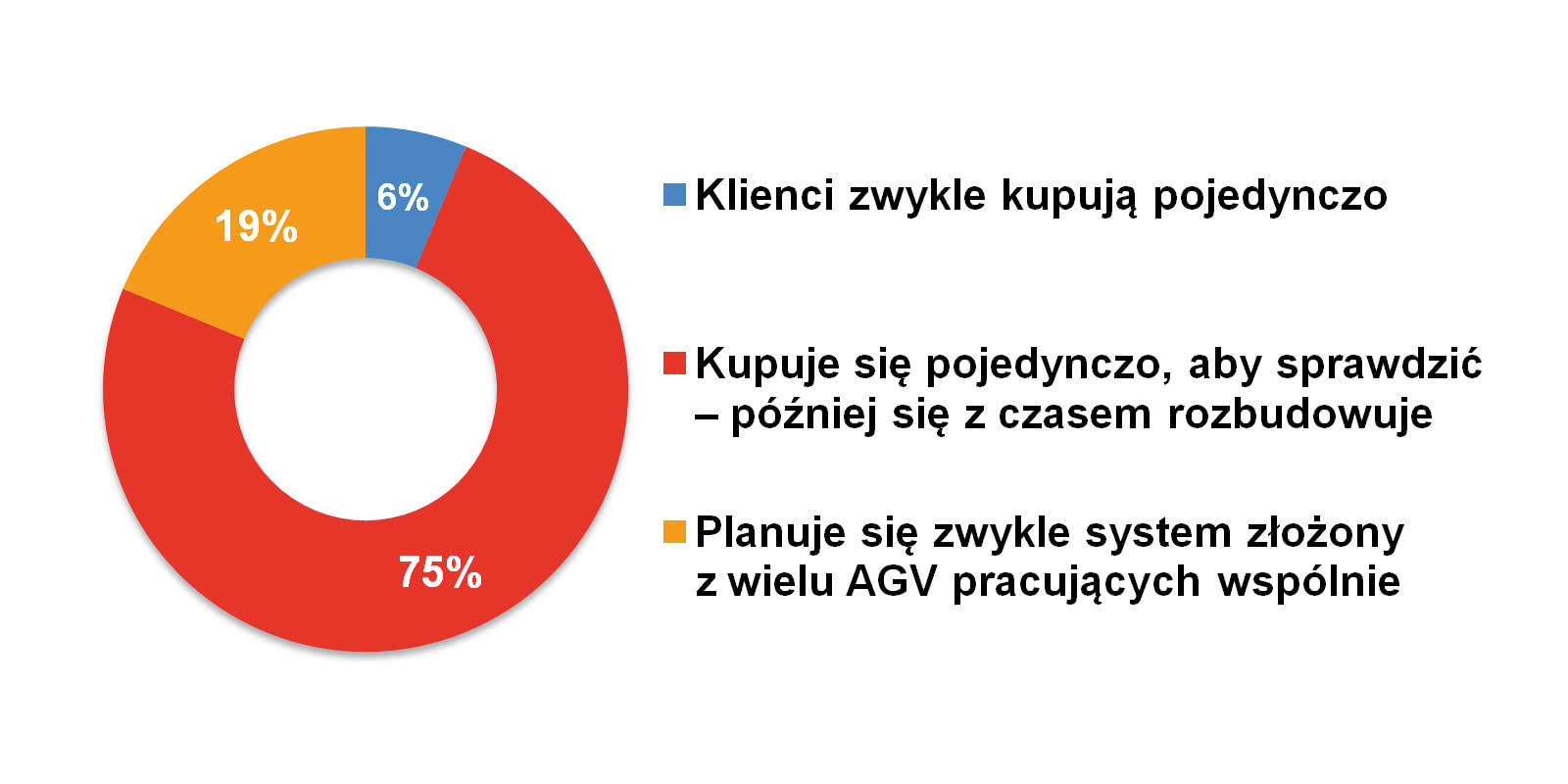
Jak są kupowane i wdrażane AGV w Polsce?
O unikanie kolizji oraz sytuacji, w której wiele pojazdów AGV może ulec awarii, odpowiada inna podstawowa funkcjonalność oprogramowania do zarządzania flotą – planowanie ruchu. Dzięki niej udaje się unikać kolizji z innymi statycznymi lub dynamicznymi obiektami. Algorytm, zapobiegając blokowaniu pojazdów, ogranicza liczbę pojazdów na danym obszarze. Ograniczanie liczby pojazdów na danym obszarze nazywa się kontrolą strefową. Po dotarciu AGV do miejsca docelowego następuje zazwyczaj załadunek towaru. Dokładnie te same zadania są następnie wykorzystywane do przeniesienia załadowanego przedmiotu do stanowiska komisjonowania.
Równolegle do opisanych zadań realizowane są inne podstawowe funkcje – zarządzanie pojazdami, czyli kontrola i monitorowanie statusu AGV. W zakres funkcjonalny tego zadania wchodzi m.in. dbałość o takie kwestie, jak żywotność baterii, wymagania konserwacyjne i obsługa błędów. Zarządzanie akumulatorami w systemach pojazdów AGV jest szczególnie ważne dla obniżenia kosztów i zwiększenia wydajności systemów zrobotyzowanych. W zależności od czasu ładowania akumulator można naładować całkowicie lub częściowo, aby wypełnić lukę do następnego ładowania. Za optymalizację harmonogramu ładowania odpowiada przeznaczony do tego zadania algorytm.
Hubert Ratajczyk
Pepperl+Fuchs
- Jak roboty mobilne zmieniają logistykę magazynową oraz zakładową? Jakie są korzyści związane z ich stosowaniem?
Zaletą robotów mobilnych (AGV) jest ich duża elastyczność, tzn. łatwość dostosowania do istniejącej infrastruktury w zakładzie, a także możliwość wykorzystania do różnorodnych zadań. Aby je wdrożyć, trzeba wygospodarować miejsce na stacje ładujące, następnie określić, skąd ma być odbierany towar i gdzie dostarczany. Gdy potrzebujemy zmienić te punkty lub określić inną trasę – wystarczy przeprogramować robota!
W przypadku tradycyjnych przenośników taśmowych musimy precyzyjnie określić trasę na poziomie projektu. Zmiany w późniejszym czasie są kosztowniejsze oraz pochłaniają więcej czasu. Uszkodzenie jednego z komponentów taśmociągu wpływa na zatrzymanie całej linii, zaś w przypadku awarii jednego AGV cały proces działa dalej, a zadanie uszkodzonego robota może przejąć kolejny.
- Jak przekonywać potencjalnych odbiorców do ich stosowania? Gdzie AGV używane są najczęściej?
AGV cieszą się niezmiennie największą popularnością w sektorze automotive, jednak coraz częściej sięgają po nie również inne branże, takie jak FMCG, logistyka, farmacja, AGD i wiele innych. Jeśli chodzi o zastosowania, to jest to przewóz gotowych produktów do magazynu czy też dostarczanie komponentów z magazynu na stanowiska montażowe.
Argumentem przekonującym klientów do wdrożenia pojazdu autonomicznego może być bardzo małe ryzyko popełnienia przez niego błędu – o ile mamy dobrze zaprogramowany proces. Ryzyko pomyłki jest dużo mniejsze niż w przypadku człowieka. AGV może również pracować na 3 zmiany, przez 7 dni w tygodniu z przerwami na ładowanie. Dodatkowo zapewnia dużą efektywność i bezpieczeństwo. Oczywiście są też potencjalne obawy. Tutaj najważniejsze są kwestie finansowe, bowiem zakup AGV to często duży wydatek dla przedsiębiorstwa. Jednak coraz częściej ze względu na brak pracowników oraz dużą rotację firmy przekonują się do tego typu rozwiązań.
|
2. Nawigacja SLAM
SLAM (Simultaneous Localization and Mapping) sprawia, że pojazdom AGV, a także innym robotom, łatwiej jest nawigować w przestrzeni. Metody i technologie SLAM rozwijane są od wielu lat, ale dzięki znacznej poprawie szybkości przetwarzania komputerowego i dostępności tańszych czujników, takich jak kamery i dalmierze laserowe, SLAM jest obecnie wykorzystywany w coraz większej liczbie dziedzin.
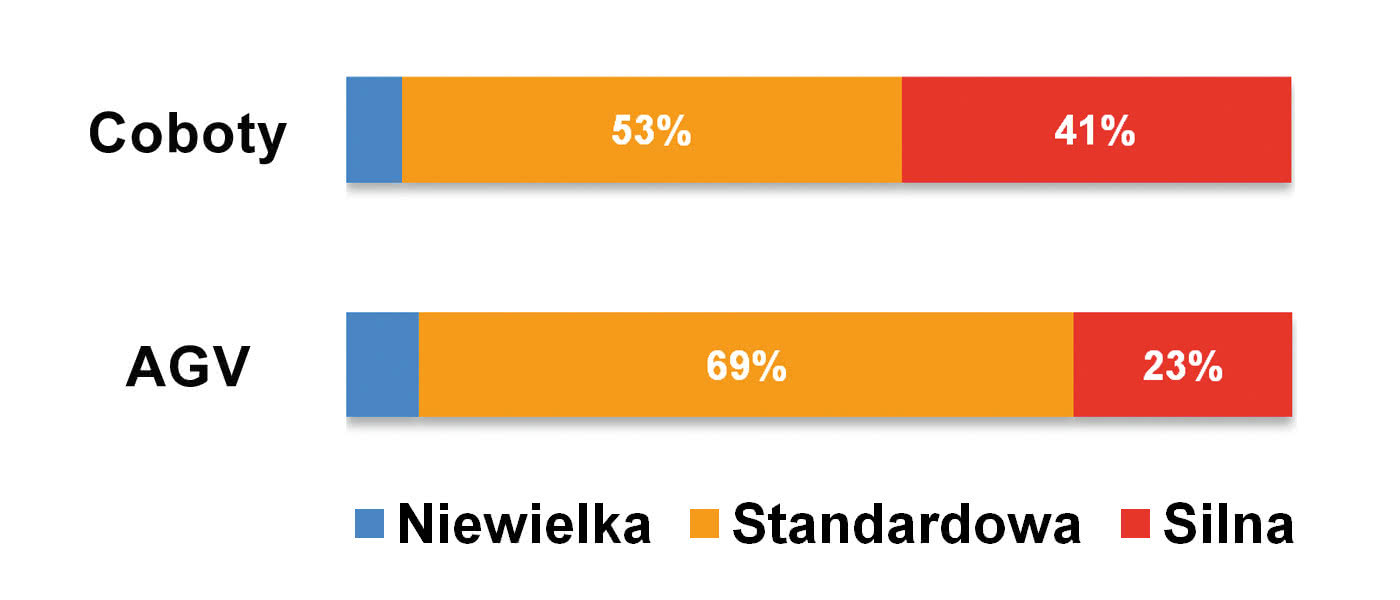
Jakie są najważniejsze powody korzystania z AGV? Czym dostawcy przekonują klientów?
Systemy SLAM mogą wykorzystywać takie informacje jak liczba obrotów kół oraz dane z kamer i innych czujników przetwarzających obraz, po to aby określić odległości i lokalizację w przestrzeni. Robot może jednocześnie korzystać z kamery i innych czujników, aby stworzyć mapę przeszkód w swoim otoczeniu. Zadanie to nazywane jest mapowaniem.
W SLAM wykorzystywane są dwa rodzaje komponentów technologicznych. Pierwszym jest przetwarzanie sygnału z czujników, drugi to optymalizacja pozycji, która jest niezależna od stosowanego czujnika. Możemy też wyróżnić dwie metody wyznaczania położenia na podstawie danych pochodzących od wspomnianych rodzajów czujników: Visual SLAM oraz LiDAR SLAM. Visual SLAM (lub vSLAM) wykorzystuje obrazy pozyskane z kamer i innych czujników obrazu. W tym procesie zastosowanie znajdują kamery szerokokątne, kamery typu rybie oko i sferyczne, kamery złożone oraz kamery RGB-D (kamery głębi i ToF). Z kolei wykrywanie światła i określanie odległości (LiDAR) to metoda wykorzystująca przede wszystkim czujnik laserowy (czujnik odległości).
Więcej informacji o rynku
Osoby zainteresowane dalszymi informacjami dotyczącymi cobotów i robotów mobilnych zapraszamy do lektury analizy w kolejnym wydaniu IRA (2025). Sugerujemy także odwiedziny serwisu www.automatykaB2B.pl, gdzie w dziale "raporty" regularnie publikujemy opracowania dotyczące omawianej tematyki.
Jesper Sonne Thimsen
Mobile Industrial Robots
- Jakie są zastosowania robotów mobilnych? Gdzie sprawdzają się tego typu maszyny?
AMR-y sprawdzają się wszędzie tam, gdzie potrzebny jest transport wewnętrzny – szczególnie w logistyce, motoryzacji oraz FMCG. Autonomiczne roboty mobilne optymalizują przepływy pracy, produktywność, koszty, pozwalają oszczędzać przestrzeń zakładu lub magazynu oraz zwiększają bezpieczeństwo i zdolność adaptacji do warunków dynamicznie zmieniającego się rynku. Przykładowo poprzez samodzielny dobór najbardziej efektywnej trasy w zakładzie automatyzują transport do i z hali produkcyjnej lub magazynu, eliminując w ten sposób wąskie gardła w produkcji.
- Jak przekonywać potencjalnych odbiorców do wdrażania robotów?
Klientów zawsze najłatwiej przekonać korzyściami, a tych wdrożenia AMR mają wiele. Są nimi: łatwa integracja, brak konieczności wprowadzania zmian w istniejącym układzie hali produkcyjnej/magazynu podczas ich wdrażania i eksploatacji, nawet 15-godzinny czas pracy oraz automatyczne ładowanie baterii, gdy nie wykonują żadnych zadań. To wszystko upłynnia przepływ pracy i optymalizuje logistykę wewnętrzną. Dodatkowo AMR-y nie wymagają operatora, miejsca do manewrowania czy szczególnej uwagi ze strony pracowników, bowiem wyposażone są w wiele czujników i kamer doskonale skanujących otoczenie. Kolejną zaletą jest niskie zapotrzebowanie na energię: w czasie pełnej 8-godzinnej zmiany potrzebują około 1,73 kWh energii (koszt to około 1,35 zł). Zwrot z inwestycji jest zazwyczaj krótszy niż rok. Automatyzując proste i z reguły monotonne procesy związane z intralogistyką, roboty umożliwiają pracownikom wykonywanie bardziej złożonych i kreatywnych zadań!
|