
WEJŚCIA POMIAROWE, WYJŚCIA KRZYWKOWE
Aby sprostać najbardziej wymagającym aplikacjom przemysłowym, nowoczesne układy serwonapędowe muszą zapewnić nie tylko wysoką dokładność pozycjonowania, ale również ściśle określoną reakcję na odczytane sygnały oraz zdarzenia.
Charakterystyka układu pomiarowego oraz jego parametry zostały już omówione w poprzednich publikacjach. W dalszej części zajmiemy się możliwościami systemów SIMATIC w zakresie dokładnej detekcji zmian sygnałów w czasie, a także precyzyjnej odpowiedzi układu na wykonane pomiary.
W celu realizacji zadań o wysokiej precyzji nadrzędny system sterowania powinien zostać wyposażony w odpowiednią funkcjonalność. Od strony sprzętowej potrzebny będzie tzw. moduł technologiczny.
MODUŁ WEJŚĆ/WYJŚĆ CZASOWYCH TM TIMER DIDQ

Fot. 1. Moduł operacji czasowych TM Timer
Do aplikacji krytycznych czasowo przewidziany został moduł wejść/wyjść binarnych typu time-based. Oznaczenie to, sugeruje że zintegrowane kanały pozwalają na odczytywanie oraz wystawianie sygnałów z najwyższą dokładnością w czasie. Podobnie jak w przypadku poprzednich modułów technologicznych - TM Timer DIDQ zawiera autonomiczny procesor, a więc sygnały przetwarzane są w cyklu niezależnym od parametrów magistrali komunikacyjnej oraz wydajności jednostki centralnej. Dzięki temu możemy osiągnąć rozdzielczość na poziomie 1 mikrosekundy!
Funkcjonalność modułu TM_Timer DIDQ pozwala na odczyt zmian sygnałów wejściowych oraz bardzo precyzyjną rejestrację stempli czasowych tych zdarzeń. Wyjścia zaś mogą zostać ustawione w określonym punkcie w czasie.
Zintegrowane wejścia cyfrowe mają następujące funkcje:
- rejestrację do 2 stempli czasowych na cykl aplikacji,
- 32-krotne programowe zwiększenie rozdzielczości odczytu stanów wejść, tzw. nadpróbkowanie, czyli oversampling,
- funkcja licznika o częstotliwości do 50 kHz,
- możliwość podłączenia enkodera inkrementalnego.
Wyjścia cyfrowe charakteryzują się:
- rejestracją do 2 stempli czasowych na cykl aplikacji,
- 32-krotnym programowym zwiększeniem rozdzielczości zapisu stanów wyjść, tzw. nadpróbkowaniem, czyli oversamplingiem,
- funkcją modulacji szerokości impulsów (wyjście PWM).
Typowe aplikacje, jakie można zrealizować za pomocą modułu TM Timer, to m.in.:
- precyzyjne określenie czasu reakcji układu,
- wyjścia krzywkowe,
- pomiar długości obiektów,
- dozowanie płynów,
- pomiar czasu.
WEJŚCIA/WYJŚCIA TYPU TIME-BASED
Aby dobrze zrozumieć funkcjonalność modułu w szybkich aplikacjach synchronicznych, zacznijmy od omówienia kilku zagadnień podstawowych. Zostały już one wstępnie przedstawione, ale obrazowe wyjaśnienie kilku zasadniczych kwestii uczyni konfigurację transparentną.
TRYB IZOCHRONICZNY
W trybie izochronicznym cykl programu użytkownika, magistrali komunikacyjnej, odczytu sygnałów wejściowych oraz ich przetwarzanie przez procesor modułu technologicznego są zsynchronizowane. Stempel czasowy, wartości liczników, ciąg bitów funkcji nadpróbkowania oraz bity statusowe przetwarzane są w stałych odstępach czasu determinowanych przez cykl aplikacji.
CYKL MAGISTRALI ORAZ CYKL APLIKACJI

Rys. 1. Cykl pracy trybu izochronicznego
W konfiguracji naszego układu scentralizowanego definiowaliśmy cykl wykonywania programu przez określenie częstotliwości wykonywania bloku synchronicznego MC-Servo. W zależności od wybranej struktury systemu oraz programowego podejścia do kwestii synchronicznego wywołania programu - podczas parametryzacji w TIA Portal spotkamy się z pojęciami cyklu aplikacji (application cycle) oraz cyklu magistrali (send clock). Te generatory będą wywoływać cyklicznie synchroniczny program użytkownika. Pracę układu w trybie izochronicznym prezentuje poniższa grafika.
Cykl magistrali
Praca w trybie IRT oznacza, że dane pomiędzy modułem technologicznym a jednostką centralną, wymieniane będą w ściśle określonych odstępach czasu. Ten stały odcinek czasu nazywany jest zegarem magistrali (send clock), czyli jest jej cyklem izochronicznym.
Cykl aplikacji
Generator zegara magistrali komunikacyjnej jest podstawą do wyznaczenia cyklu pracy aplikacji, który jest kluczowy dla naszego projektu. Cykl aplikacji może pokrywać się z cyklem magistrali, jeśli wszystkie urządzenia domeny synchronizacyjnej obsługują określony cykl.
Cykl programu synchronicznego
Wywołanie bloku synchronicznego reprezentuje cykl pracy naszej aplikacji. Trzeba dobrać jego długość w sposób optymalny. Jeśli go wydłużymy w stosunku do cyklu magistrali (wielokrotność cyklu zegara), odciążymy zasoby obliczeniowe CPU, ale możemy równocześnie doprowadzić do zmniejszenia dokładności naszej aplikacji. Trzeba więc stwierdzić, jakiego rzędu dokładność będzie wymagana.
Z drugiej jednak strony cykl aplikacji nie może być zbyt krótki, gdyż musi trwać wystarczająco długo, aby zdążył wykonać się cykl programu synchronicznego, czyli innymi słowy odczyt wejść, ustawienie wyjść oraz zaprogramowana przez użytkownika logika programu.
DETEKCJA SYGNAŁÓW
Zgodnie z wcześniejszym opisem wejścia cyfrowe mają dedykowane funkcje technologiczne, takie jak: możliwość dokładnego określenia stempla czasowego zdarzenia, zwiększenie rozdzielczości odczytu stanów w zakresie cyklu aplikacji czy funkcje licznikowe.
REJESTRACJA STEMPLA CZASOWEGO

Rys. 2. Detekcja sygnałów ze stemplem czasowym
Wybierając opcję Timer DI - przypisujemy wejściu cyfrowemu funkcję rejestracji zmiany jego stanu wraz z jednoczesnym zapamiętaniem stempla czasowego takiego zdarzenia.
Stempel czasowy określony jest na podstawie tzw. bazy czasu. Jest to wspólny czas synchroniczny dla wszystkich zdarzeń czasowych, które mogą również pochodzić z wielu modułów sprzętowych. Czas ten jest parametrem relatywnym, którego zliczanie rozpoczynane jest w momencie przejścia CPU w tryb RUN.
Przechowywanie tego wyróżnika w zmiennej typu LTime pozwala na wygenerowanie ciągłego przyrostu wartości (wyrażanej w nanosekundach) do ponad 290 lat. Funkcjonalność taka dostępna jest jedynie w module typu time-based, wymaga również pracy w trybie izochronicznym.
Poniższy przebieg czasowy przedstawia rejestrację stempli czasowych zdarzeń wejściowych w ramach pojedynczego cyklu aplikacji (w tym przypadku równemu cyklowi magistrali). Maksymalnie system jest w stanie zarejestrować dwa zdarzenia na cykl aplikacji (czyli np. w ciągu 1 ms).
WYSTEROWANIE WYJŚĆ
Podobnie jak w przypadku kanałów wejściowych, również zintegrowane wyjścia binarne mają dedykowane funkcje technologiczne. Podstawową funkcją jest możliwość precyzyjnego wysterowania wyjścia w momencie w czasie.
STEROWANIE CZASOWE
Zastosowanie stempli czasowych pozwala na zbudowanie systemu, wykonującego powtarzalne operacje w ustalonym czasie. Wyjścia czasowe modułu technologicznego mogą zatem zostać wyzwolone bądź zgaszone w bardzo precyzyjnie określonym punkcie w czasie. Przykładowo, możemy zdefiniować dokładnie czas reakcji wyjścia na pozyskany sygnał wejściowy.
PRZYKŁADOWE APLIKACJE
Poznaliśmy już teoretyczny zakres funkcji, jakie realizuje moduł typu time-based. Zastanówmy się teraz, w przypadku jakiego typu aplikacji opisana technologia może okazać się przydatna.
ZDEFINIOWANY CZAS ODPOWIEDZI UKŁADU

Rys. 3. Przykład aplikacji bazującej na operacjach czasowych - wejście pomiarowe
Dzięki funkcjom pomiarowym o charakterystyce czasowej możemy bardzo precyzyjnie określić czas odpowiedzi systemu na zdarzenie, które zostało zarejestrowane razem ze stemplem czasowym jego wystąpienia.
Moduł TM Timer przetwarza otrzymane instrukcje autonomicznie, a co za tym idzie, możemy wysterować wyjście z określonym opóźnieniem - niezależnym od cyklu aplikacji (poza opóźnieniem jednego cyklu wynikającym z konieczności przesłania zadania logicznego do systemu nadrzędnego). W bardzo łatwy sposób możemy więc dodać wymagany czas do stempla czasowego zarejestrowanego przy zmianie stanu sygnału wejściowego.
Wykorzystanie tak precyzyjnego pomiaru czasu znajduje zastosowanie np. w aplikacjach typu print mark correction, nóż obrotowy czy odrzucanie elementów.
POMIAR DŁUGOŚCI
W aplikacjach, gdzie mamy do czynienia z szybko przemieszczającym się elementem - dokładne wskazanie stempla czasowego dwóch zmian stanu wejścia cyfrowego pozwalają wykonać różnicę tych pomiarów. Dzięki temu (oraz znajomości prędkości lub pozycji przemieszczanego obiektu) możemy bardzo dokładnie określić długość detalu.
WYJŚCIA KRZYWKOWE
Przebieg ruchu osi jest prognozowany na podstawie jej aktualnej pozycji (np. informacja z modułu licznikowego lub obiektu technologicznego). Bazując na wyniku aproksymacji, system potrafi dokładnie określić czas oraz pozycję wysterowania wyjścia (tzw. wyjście krzywkowe) i przekazać ją do modułu time-based. Dzięki temu załączenie kanału wyjściowego odbywa się dokładnie na wyznaczonej pozycji.
DOZOWANIE
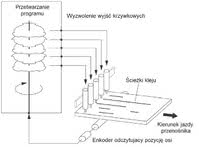
Rys. 4. Przykład aplikacji bazującej na operacjach czasowych - wyjścia krzywkowe
Wiemy już, że dzięki technologii modułu TM Timer możemy precyzyjnie zdefiniować czas załączenia oraz wyłączenia wyjścia cyfrowego. Funkcjonalność ta może okazać się niezbędna w aplikacjach sterowania zaworem dozującym. Załączenie wyjścia na ściśle określony czas pozwoli na precyzyjne odmierzenie ilości cieczy lub innej substancji.
Graficzną prezentację wybranych aplikacji można prześledzić na stronie internetowej www.siemens.pl/S7-1500T.
Zapraszamy do lektury marcowego wydania Magazynu, gdzie zamieszczony zostanie ostatni materiał z cyklu SIMATIC Motion Control. Zajmiemy się w nim opisem realizacji funkcji bezpieczeństwa w układach napędowych.
Ze względu na specyfikę zagrożeń jakie mogą zostać wytworzone dla ludzi oraz mienia przez elementy ruchome - układ bezpieczeństwa jest bardzo istotną, wręcz niezbędną częścią projektu maszyny. W publikacji rozważymy powszechnie stosowane rozwiązania w tej dziedzinie.
Siemens
www.automatyka.siemens.pl





















