Komunikacja czasu rzeczywistego w przemyśle
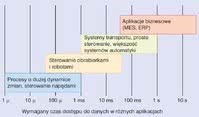
Rys. 1. Wymagany czas dostępu do danych w różnych aplikacjach
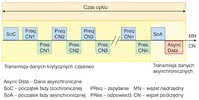
Rys. 2. W każdym cyklu transmisji w sieci Ethernet Powerlink wyróżnić można trzy przedziały
W CSMA/CD każdy węzeł, zanim rozpocznie nadawanie, sprawdza, czy aktualnie żadna inna stacja nie korzysta z sieci. Jeżeli łącze jest zajęte, transmisja zostaje wstrzymana, w przeciwnym wypadku dane są wysyłane. W trakcie transmisji węzeł stale monitoruje łącze i jeżeli wykryje, że równocześnie nadawać zaczął inny użytkownik, odnotowuje zdarzenie kolizji.
Ponieważ oznacza to, że w wyniku nałożenia się na siebie sygnałów wysyłanych przez różnych nadawców dane uległy zmianie, konieczna jest ich retransmisja. Może to jednak nastąpić dopiero po pewnym czasie, wybranym losowo i innym dla każdej stacji. Jeśli opóźnienia te będą różne, jeden z węzłów rozpocznie nadawanie.
Fot. 1. Tester sieci Ethernet/Profinet BC-200-ETH
Jeżeli jednak po przerwie kolizja wystąpi ponownie, automatycznie zwiększany jest zakres wartości, z których wybierane są kolejne opóźnienia. Zmniejsza to prawdopodobieństwo ponownego jednoczesnego rozpoczęcia transmisji przez obie stacje. Im więcej węzłów w sieci, tym większe jest natężenie ruchu i częściej występują kolizje.
W rezultacie opóźnienia transmisji są dłuższe oraz mniej przewidywalne. Następcą Ethernetu współdzielonego z komunikacją w trybie half-duplex był Ethernet przełączany (switched Ethernet), w którym wprowadzono transmisję w trybie full-duplex. W tym podejściu każdy węzeł może nadawać i odbierać dane jednocześnie, a cała sieć jest podzielona na segmenty składające się par węzeł-switch.
Realizuje się to przez dołączanie węzłów sieci do kolejnych portów przełącznika. Dzięki temu, że zrezygnowano z bezpośredniej łączności między stacjami, wyeliminowano możliwość kolizji danych, w efekcie czego stosowanie mechanizmu CSMA/CD przestało być konieczne.
ETHERNET PRZEŁĄCZANY
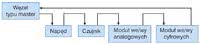
Rys. 3. W sieci EtherCAT jedna ramka jest przetwarzana w locie przez wszystkie węzły po kolei
Switch pośredniczy w przekazywaniu wiadomości od nadawcy do odbiorcy, przekierowując pakiety danych między odpowiednimi portami. Jeżeli któryś z tych ostatnich jest zajęty, to transmisja zostaje wstrzymana, a dane są buforowane w switchu. Problem oczekiwania wiadomości w kolejce jest rozwiązywany dzięki priorytetyzacji.
Polega ona na różnicowaniu ważności wiadomości na podstawie ich priorytetu. Ten najwyższy przyznawany jest danym o największym znaczeniu, dzięki czemu takie pakiety w przełącznikach obsługujących mechanizm QoS (Quality of Service) są przesuwane na początek kolejki. Gwarantuje to ich dostarczenie na czas, wyklucza losowe opóźnienia oraz konieczność retransmisji.
Na determinizm czasowy transmisji nie wpływają również opóźnienia wprowadzane przez same switche, które są określone oraz pomijalnie małe (rzędu ns). Przełączniki mają jednak kilka wad, m.in. zwiększają koszty budowy sieci.
Ponadto jako dodatkowe komponenty, które mogą się zepsuć, wymagają kontroli oraz konserwacji. Dlatego w protokołach Ethernetu przemysłowego wprowadzane są różne rozwiązania, dzięki którym także bez użycia przełączników można w warstwie aplikacji zapewnić determinizm czasowy transmisji.
Laserowy skaner bezpieczeństwa w sieci Profinet
 W jednym z zakładów z branży motoryzacyjnej planowano dobór wyposażenia zrobotyzowanego stanowiska montażowego. Ponieważ w fabryce działa sieć komunikacyjna Profinet, zdecydowano się kupić komponenty systemu napędowego oraz roboty również z interfejsem tego typu. W jednym z zakładów z branży motoryzacyjnej planowano dobór wyposażenia zrobotyzowanego stanowiska montażowego. Ponieważ w fabryce działa sieć komunikacyjna Profinet, zdecydowano się kupić komponenty systemu napędowego oraz roboty również z interfejsem tego typu.
Aby zapewnić ochronę personelowi pracującego w pobliżu tego stanowiska, trzeba było uzupełnić je również o zabezpieczenia uniemożliwiające przypadkowe znalezienie się ludzi w zasięgu pracujących maszyn. W tym celu zdecydowano się zainstalować na linii montażowej skanery bezpieczeństwa firmy Sick serii S3000 Profinet IO.
Można je podłączyć bezpośrednio do magistrali sieci zakładowej, co ma wiele zalet - m.in. do zintegrowania tego czujnika nie są wymagane dodatkowe urządzenia sieciowe, ograniczone są również wydatki na okablowanie. Ponadto uproszczona jest zdalna diagnostyka skanera.
|
ETHERNET PRZEMYSŁOWY
 Dotychczas opracowano około trzydziestu protokołów tzw. Ethernetu przemysłowego, z których jednak w powszechnym użyciu jest tylko kilka. Są to m.in. Ethernet/IP, Modbus/TCP, EtherCAT, Profinet, Ethernet Powerlink, Sercos-III i, popularny głównie w Azji, CC-Link IE. Różnią się one między sobą stopniem zgodności z Ethernetem TCP/IP. Dotychczas opracowano około trzydziestu protokołów tzw. Ethernetu przemysłowego, z których jednak w powszechnym użyciu jest tylko kilka. Są to m.in. Ethernet/IP, Modbus/TCP, EtherCAT, Profinet, Ethernet Powerlink, Sercos-III i, popularny głównie w Azji, CC-Link IE. Różnią się one między sobą stopniem zgodności z Ethernetem TCP/IP.
Niektóre protokoły, na przykład Ethernet/IP, są w pełni kompatybilne, tzn. zarówno w warstwie sprzętowej, jak i programowej. Z kolei m.in. w Ethernet Powerlink wykorzystuje się rozwiązania standardowe wyłącznie w warstwie sprzętowej.
EtherCAT natomiast wymaga specjalnych rozwiązań sprzętowych w kontrolerach węzłów slave, a równocześnie wprowadza modyfikacje w warstwie programowej w celu implementacji funkcjonalności węzłów master.
Rozwiązania wprowadzane w protokołach Ethernetu przemysłowego mają na celu przede wszystkim zorganizowanie wymiany danych w sieci w taki sposób, aby wykluczyć możliwość równoczesnego rozpoczęcia nadawania przez kilka węzłów. Osiąga się to, wykorzystując mechanizm odpytywania (pooling) w konfiguracji master- slave, metodę token passing lub schemat wymiany danych producent-dystrybutor-konsument.
Można również stosować połączenie lub modyfikacje tych metod. Dalej wyjaśniamy, jak determinizm czasowy uzyskiwany jest w protokołach Ethernet Powerlink, EtherCAT, Ethernet/IP oraz Profinet. Na przykładzie dwóch ostatnich przedstawiamy również dodatkowe mechanizmy, które pozwalają spełnić wymagania stawiane sieciom komunikacyjnym w środowisku produkcyjnym.
Zobacz więcej w kategorii: Temat miesiąca
Zobacz więcej z tagiem: Artykuły
Unikalny branżowy system komunikacji B2B
Znajdź produkty i usługi, których potrzebujesz
Katalog ponad 7000 firm i 60 tys. produktów
| 













