
Wyróżnić można kilka technik wydobycia, zależnie od typu kopalin, lokalizacji i rozmiarów złóż. Najstarsza forma eksploatacji to górnictwo odkrywkowe, obecnie powszechniejsze jest natomiast górnictwo podziemne. W pierwszy sposób wydobywa się surowce na powierzchni ziemi albo tuż pod nią. Nie jest zatem wymagane głębokie kopanie, należy tylko usunąć materiał znajdujący się nad pokładami kopaliny (gleba, skały, roślinność). Kopalnie odkrywkowe są bezpieczniejsze niż podziemne, ponieważ ewakuacja górników w razie katastrofy jest łatwiejsza. Niebezpieczeństwo zawału dołów i te związane z użyciem materiałów wybuchowych także jednak w nich występuje. Ponadto zajmują i ingerują w rozległy teren.
Kopaliny ukryte pod powierzchnią na dużych głębokościach wydobywa się drążąc tunele, usuwając materiały, które znajdują się nad ich pokładami i eksploatując złoże. Wiąże się z tym duże niebezpieczeństwo dla pracowników. Kopalnie podziemne wymagają też większych nakładów pracy niż odkrywkowe, ale tak jak one znacząco ingerują w otoczenie
Praktykuje się jeszcze dwie metody wydobycia. Pierwsza polega na płukaniu i przesiewaniu minerałów zmieszanych z osadami, w drugiej wykorzystuje się roztwory, które je rozpuszczają i wypłukują.
Ochrona przed wodą i pyłem oraz konstrukcje specjalneKopalnie to trudne środowisko pracy nie tylko dla ludzi, ale i sprzętów, szczególnie urządzeń elektronicznych i złączy. Dlatego te zintegrowane ze sprzętem ciężkim używanym pod ziemią, jak i w kopalniach odkrywkowych, wymagają obudów zapewniających odpowiednią ochronę przede wszystkim przed wnikaniem wody i kurzu. Charakteryzuje ją stopień IP. Przykładowo osłona z gwarantowaną ochroną IP66 oznacza pyło- i wodoszczelność przy zalaniu falą wody. Z kolei elektronika wewnątrz obudowy o stopniu ochrony IP68 może być bez uszczerbku dla jej funkcjonalności poddana zanurzeniu ciągłemu. Projektanci obudów muszą zadbać o to by deklarowany poziom ochrony spełniało nie tylko samo „pudełko”, ale także wyprowadzane z niego i doprowadzane do niego okablowanie i złącza. Dotyczy to także ekranów dotykowych, przełączników oraz czytników. Dlatego wszystkie otwory i wstawki w obudowach muszą być wykonane z materiałów i w sposób, który zapewni taki sam lub większy stopień ochrony przed wnikaniem wody i kurzu jak obudowa. Z tego powodu nie wolno także samodzielnie dokonywać przeróbek w osłonach o deklarowanym IP, o ile nie chcemy zniweczyć wysiłków producenta. Ważny jest także dobór materiału obudowy, by wytrzymała ona trudne warunki panujące w kopalniach. Na przykład w kopalniach złota wymagane są te odporne na korozję ze względu na agresywne chemikalia, które stosowane są w procesie wydobycia tego surowca. Najbardziej uniwersalnym materiałem jest stal nierdzewna. Kolejną ważną kwestią jest ochrona przed wpływem skrajnych temperatur. Obudowy nagrzewają się od ciepła wydzielanego przez elektronikę wewnątrz i od źródeł z zewnątrz jak pracujące w pobliżu napędy albo silne nasłonecznienie. Konstrukcja osłony powinna zapobiegać nadmiernemu wzrostowi temperatury – w tym celu m.in. stosowane są przegrody, które stanowią osłonę przeciwsłoneczną. Aby z kolei odprowadzać nagrzane powietrze ze środka obudowy na zewnątrz, równocześnie nie dopuszczając do wnikania kurzu do wnętrza urządzenia, wyposaża się je w wentylatory z filtrem powietrza. I chociaż w takim przypadku nieosiągalny jest stopień ochrony IP68, możliwy jest IP66, o ile zostaną zastosowane osłony wentylatorów, które chronią przed kurzem i wodą. Obudowy urządzeń w kopalniach wykonane są często jako pochyłe, żeby zapobiegać gromadzeniu się pyłu i ułatwić jego zmywanie. Ze względu na silne wibracje i udary, na które narażona jest elektronika w sprzęcie ciężkim, stosowane są też rozwiązania amortyzujące drgania, na przykład przez specjalne antywstrząsowe mocowania płytek drukowanych. |
Automatyka i pomiary w robotach strzałowych
Ważny etap wydobycia surowców w górnictwie odkrywkowym i podziemnym to roboty strzałowe. Mianem tym określa się ciąg czynności, których celem jest urabianie skał przez wysadzenie ich w powietrze. Obejmują one: wywiercenie otworów, wypełnienie ich materiałem wybuchowym oraz detonację. Automatyzacja tych operacji ma potencjał, by znacząco poprawić ich dokładność oraz opłacalność – na przykład w kopalniach odkrywkowych węgla udział tych zadań w całkowitym koszcie wydobyciu może sięgać nawet 15%. Niedociągnięcia w ich zakresie jeszcze zwiększają te wydatki – na przykład jeśli otwory strzałowe będą mniejsze, niż planowano, wymagana będzie większa ilości materiałów wybuchowych. Wpływa to też na koszt innych operacji – na przykład niedostateczne rozdrobnienie urobku zmniejsza wydajność załadunku, transportu oraz przeróbki.
Dlatego opracowuje się różne rozwiązania eliminujące niedokładność m.in. w wykonaniu odwiertów. Tradycyjnie są mierzone ręcznie, a wyniki pomiarów, czyli głębokość otworu strzałowego, jego średnicę i wysokość słupa wody, która może go wypełniać, zapisuje się na liście wraz z jego współrzędnymi. Następnie dane te są wprowadzane do programu do planowania rozmieszczenia ładunków wybuchowych. Lepszym rozwiązaniem jest system pomiaru objętości otworów strzałowych zintegrowany z wiertłem, który skanuje je, kiedy jest ono z nich wyjmowane. Korzysta się ponadto z systemów monitorowania odwiertów w czasie rzeczywistym przed, w trakcie i po ich wypełnieniu materiałem wybuchowym. W tym celu po wywierceniu otworów umieszcza się w nich sensory podłączone do nadajnika bezprzewodowego. Nim odwiert zostanie wypełniony, monitorowana jest jego głębokość w celu wykrycia zawału, wysokość słupa wody i temperatura w otworze, co pozwala wykryć te niebezpiecznie gorące. Na podstawie tych informacji dobierany jest ładunek wybuchowy. Podczas umieszczania go w odwiercie czujnik monitoruje postęp tego procesu, mierząc głębokość kolumny materiału. Na koniec sensor zanurzony w ładunku wybuchowym mierzy jego gęstość i temperaturę, wykrywa wnikanie wody i zachodzące reakcje niepożądane, a podczas detonacji jej prędkość.
Co wyróżnia wodne młoty wgłębne?

Zmechanizowane wiercenie w górnictwie ma długą tradycję. Rosnące przez lata wymagania w zakresie dokładności, głębokości, prostoliniowości odwiertów wymuszały udoskonalanie jego technik. Najnowszym osiągnięciem w tej dziedzinie są wodne młoty wgłębne. Mają one wiele zalet w porównaniu z konkurencyjnymi metodami wykonywania odwiertów (hydraulicznymi, pneumatycznymi), pod względem mniejszego zużycia energii i oddziaływania na środowisko oraz lepszych warunków i efektów wiercenia (głębsze otwory z minimalną odchyłką).
W przykładowym wykonaniu młot wodny zbudowany jest tylko z dwóch ruchomych części: tłoka i zaworu. To zwiększa żywotność tych urządzeń i umożliwia im pracę w najtrudniejszych warunkach. Zasada ich działania jest następująca: woda pod dużym ciśnieniem napędza mechanizm udarowy młota, a gdy go opuszcza, chociaż wytraciła prędkość, ma jeszcze wystarczającą siłę spłukiwania, żeby móc wypchnąć zwierciny na powierzchnię, oczyszczając odwiert. Oprócz tego kolumna hydrostatyczna, która tworzy się nad młotem zapobiega zapadnięciu się otworu oraz wciąganiu wody z otoczenia do odwiertu. To poprawia jego stabilność.
Zalety młotów tego rodzaju wynikają z właściwości wody. Przede wszystkim w porównaniu z powietrzem ma mniejszą ściśliwość. Oznacza to, że wymagana jest jednakowa objętość wody niezależnie od docelowego ciśnienia, natomiast im większe docelowe ciśnienie powietrza, tym odpowiednio większy musi być jego przepływ. Większe ciśnienie to większa liczba uderzeń na minutę. Przykładowo porównamy dwa młoty o jednakowym rozmiarze, pneumatyczny i wodny. Ten drugi, pracując pod ciśnieniem 180 barów zapewni 3600 uderzeń na minutę zużywając tylko 3‒6 litrów wody na sekundę, z kolei pneumatyczny zasilany sprężonym powietrzem o ciśnieniu zaledwie 30 barów, zapewniając tylko poniżej 2700 uderzeń na minutę, zużyje w tym celu aż około 100 razy więcej medium, pobierając około 350‒450 litrów powietrza na sekundę.
Kolejna różnica dotyczy sytuacji, w której otwór wypełni się wodą przesiąkającą z otoczenia – jej wypompowanie przez młot pneumatyczny może spowodować znaczący spadek ciśnienia roboczego. Oprócz tego sprężone powietrze, rozprężając się wnika w grunt w otoczeniu odwiertu, mogąc go uszkodzić. Z kolei młoty wodne nie wytwarzają pyłów ani nie wymagają smarowania. Pozwalają również na wykonywanie bardzo wąskich otworów, gdyż średnice żeber stabilizujących, a więc i prześwit między młotem a otworem, mogą być bardzo małe. Wynika to ze stosunkowo małej prędkości wody powrotnej (kilka m/s) w porównaniu z rozprężającym się powietrzem (kilkadziesiąt m/s), co wymusza dostępność większej przestrzeni do jego odprowadzenia. Młoty wodne są również dokładniejsze i pracują ciszej, gdyż jednostka udarowa jest umieszczona na dnie odwiertu.
Jak działa strug?
Praktykowane są różne sposoby podziemnej eksploatacji surowców. Popularną m.in. w kopalniach węgla w Europie jest metoda ścianowa. Korzysta się w niej z dwóch rodzajów maszyn górniczych, które różnią się techniką urabiania kopalin: kombajnów ścianowych albo strugów.
Głównymi komponentami maszyn drugiego typu są: korpus, głowica z końcówkami skrawającymi, przenośnik czołowy i napęd. Zasada działania strugów jest następująca: korpus z głowicą urabiającą jest przeciągany za pomocą łańcuchów wzdłuż transportera czołowego od początku do końca ściany przodka. Łańcuchy są wprawiane w ruch przez napędy, które są zabudowane na końcach maszyny. Równocześnie przenośnik, a razem z nim korpus i głowica, są dociskane do skały. To sprawia, że przy przesuwaniu struga wzdłuż przodka kolejne jej warstwy o określonej grubości są usuwane. Głębokość skrawania można zmieniać, regulując docisk głowicy do ściany.
W urządzeniach tego typu wprowadzane są specjalne rozwiązania konstrukcyjne wymuszane specyfiką ich zastosowania. Ważnym komponentem strugów jest korpus. Często możliwa jest zmiana jego wysokości przez dołączenie lub odłączenie bloków ostrzy skrawających i regulację podniesienia głowicy. Strug wyposaża się również w amortyzator. Tę funkcję pełni przykładowo elastyczne sprzęgło zamontowane w zespole ciągnącym. Dzięki temu maszyna pracuje płynniej, a łańcuch i napędy są mniej obciążone i wolniej się zużywają. Prowadnicę struga wykonuje się w formie odlewu, dzięki czemu jest wytrzymalsza. Jest również projektowana w taki sposób, żeby ograniczyć tarcie pomiędzy nią a łańcuchem i wbudowuje się w nią drzwiczki inspekcyjne, zapewniające łatwy dostęp do łańcucha. Strugi wyposaża się w napędy ze zmienną prędkością obrotową. Ważnym elementem jest ochrona przed przeciążeniem. W tym celu napęd wyposaża się w wielotarczowe sprzęgło z zespołem dociskowym, zapewniające moment obrotowy mniejszy niż ten zrywający łańcuch. W razie wykrycia poślizgu moment obrotowy przekładni jest od razu obniżany i jednocześnie wyłączane są silniki. Zapobiega to uszkodzeniu łańcucha.
Strugiem zwykle steruje się zdalnie. Dzięki temu operator nie musi przebywać w pobliżu wyrobiska w trakcie eksploatacji zasobów, podczas której warunki są dla niego niekorzystne. Zamiast tego może z bezpiecznej odległości, pod ziemią lub na powierzchni, ręcznie sterować maszyną albo nadzorować jej pracę w trybie automatycznym. Położenie głowicy jest określane przez monitorowanie ruchu łańcuchów. Ustawienia struga są regulowane w pionie i w poziomie za pomocą siłowników, wydłużanych i skracanych dla zwiększenia lub zmniejszenia głębokości skrawania. Dzięki temu jego przesuw odwzorowuje pofałdowania pokładu, co zmniejsza zużycie ostrzy i energii przy jednocześnie efektywnej eksploatacji dostępnych zasobów. Automatycznie korygowany jest także nadmierny lub niedostateczny nacisk, co zapewnia proste czoło przodka. Poza tym siłowniki zamontowane między przenośnikiem czołowym a wspornikiem stropowym na końcach chodnika kontrolują pełzanie transportera i zapewniają utrzymanie odpowiedniego naprężenia łańcucha struga.
Zagrożenia wybuchem w kopalniachW kopalniach występuje atmosfera wybuchowa, czyli mieszanka palnych gazów, par, pyłów z powietrzem (w kopalniach węgla kamiennego głównie metanu i pyłu węglowego), w której po zainicjowaniu źródłem zapłonu spalanie będzie rozprzestrzeniać się samorzutnie. Przebywający w pobliżu są wówczas narażeni na działanie wysokich temperatur i fali uderzeniowej. Groźne są też przemieszczające się w niekontrolowany sposób resztki zniszczonych przez wybuch obiektów, brak tlenu oraz trujące produkty reakcji spalania. Dlatego zapobieganie eksplozjom jest kluczowe. Przede wszystkim nie wolno dopuścić do powstanie mieszanki wybuchowej. Tutaj warto wyjaśnić, że by substancja łatwopalna wytworzyła w połączeniu z powietrzem atmosferę wybuchową, muszą zostać spełnione określone warunki. Na przykład w przypadku pyłu węglowego musi on zawierać więcej niż 10% części lotnych w przeliczeniu na bezwodną i bezpopiołową substancję węglową i być odpowiednio rozdrobniony. Warunkiem koniecznym jest również, aby stężenie substancji łatwopalnej zawierało się pomiędzy dolną a górną granicą wybuchowości – w przypadku pyłu węglowego wartości graniczne to 50 g/m³ i 1000 g/m³. W obecności metanu wybuchowość pyłu węglowego jest większa. Na przykład przy 2% zawartości CH4 minimalne stężenie pyłu węglowego, przy którym powstanie mieszanka wybuchowa, wynosi 10 g/m³. By zapobiec wytworzeniu się atmosfery wybuchowej, powinno się więc przede wszystkim zapobiec zgromadzeniu się substancji łatwopalnej o odpowiednich właściwościach. W przypadku pyłu węglowego trzeba w tym celu m.in. stosować techniki urabiania węgla powodujące jak najmniejsze zapylenie, regularnie go usuwać, na przykład zmywając wodą i pozbawiać lotności przez zraszanie go wodą. |
Sterowanie kruszarkami

Maszyny górnicze to w większości bardzo energochłonne urządzenia, dlatego tak istotne jest optymalizowanie ich pracy, żeby działały jak najefektywniej. W tym celu do zarządzania ich pracą wykorzystuje się systemy sterowania dostosowane do ich specyfiki. Przykładem są te usprawniające pracę kruszarek, dzięki którym pracują one przy najbardziej ekonomicznych ustawieniach na wszystkich etapach rozkruszania urobku, a jednocześnie utrzymywana jest zakładana przepustowość. Uzyskuje się to, kontrolując w czasie rzeczywistym parametry ich pracy i dostosowując je do zmiennej ilości i prędkości podawania urobku oraz jego twardości. Dzięki temu maszyna jest chroniona przed przeciążeniem, a przy mniejszym obciążeniu pracuje w trybie oszczędzania energii. Możliwość pracy w trybie kompensacji wahań obciążenia pozwala także utrzymać stałą jakość kruszenia oraz ograniczyć uszkodzenia zmęczeniowe komponentów.
Przydatną opcją jest także możliwość zaprogramowania profili pracy z różnymi optymalnymi w danym przypadku ustawieniami, na przykład gdy w kopalni urabia się różne typy skał, jak rudy twarde, miękkie i piaszczyste, różniące się charakterystyką kruszenia. Kruszarki można zwykle również automatycznie skalibrować i przełączyć się z trybu automatycznego na ręczny, jeśli konieczne jest otwarcie maszyny, na przykład w przypadku zablokowania niewymiarowym blokiem skalnym. Sytuacja ta wymaga interwencji operatora, który musi zmienić orientację bloku na umożliwiającą jego zmiażdżenie. Płynność przełączenia między trybami jest ważna dla ciągłości produkcji.
Oprócz tego nadzorowany jest stan wykładziny kruszarki wykonanej z materiałów trudnościeralnych. W oparciu o informacje o stopniu ich zużycia można lepiej zaplanować termin wymiany, nim jeszcze jej zły stan pogorszy efektywność kruszenia, a zarazem dobierając go tak, by pokrył się z zaplanowanymi przestojami konserwacyjnymi. Monitorowane są poza tym komponenty kruszarki wymagające smarowania, co wydłuża ich żywotność. Oprogramowanie systemów zarządzania poszczególnymi maszynami jak kruszarki można zwykle, na przykład dzięki dostępności serwera OPC, łatwo integrować z nadrzędnym systemem sterowania jak SCADA. Udostępniane są też często rozszerzenia graficzne, dzięki którym kruszarkami można sterować zdalnie i wieloma naraz.
Dariusz Molenda
|

Inteligentne koparki

Nagromadzenie komponentów automatyki i czujników stanowią też systemy pokładowe koparek. Przykład to te automatycznie ograniczające odchylenie łyżki, co ma zapobiegać rozsypywaniu się urobku i utrzymujące wymagany kąt jej ustawienia, w poziomie i pionie. Dzięki sensorom koparki, uważane raczej za maszyny o prostej funkcjonalności (pobierz łyżką materiał i go rozładuj), mogą też jednak działać inteligentniej. W jednym z przykładowych rozwiązań wyposaża się je w czujniki rentgenowskie. Działają one, wykorzystując technikę rentgenowskiej spektroskopii fluorescencyjnej, która pozwala na jakościową oraz ilościową ocenę składu pierwiastków próbki. Zasada pomiaru jest następująca: naświetlenie próbki promieniowaniem rentgenowskim powoduje wybicie elektronów z powłok. Powstałe w efekcie dziury zapełniają się elektronami przechodzącymi z wyższych powłok, czemu towarzyszy emisja promieniowania X o energii charakterystycznej dla danego pierwiastka, co pozwala na jego identyfikację. Intensywność linii specyficznych dla konkretnego pierwiastka w widmie promieniowania pozwala określić ilościowy skład próbki. Jest to metoda szybka oraz nieniszcząca.
się w łyżkę koparki. Wyniki pomiarów są w czasie rzeczywistym analizowane w oprogramowaniu, w którym zaimplementowano algorytmy uczenia maszynowego. Pozwala to na zidentyfikowanie na miejscu składu właśnie wykopanego ładunku i przyspiesza jego sklasyfikowanie jako materiału wartościowego, który należy poddać dalszej obróbce lub odpad, który trzeba przekierować na składowisko odpadów. Jest to efektywniejsza metoda niż podejście tradycyjne, w którym skład bloku skalnego ocenia się na podstawie próbek pobranych ze skały w kilku miejscach. Wiarygodność tej techniki jest ograniczona ze względu na założenie, że cały blok jest strukturą jednorodną, podczas gdy w rzeczywistości jest niejednolity. Przez to liczyć się trzeba ze stratą surowca uznanego za odpady, jak i ich obecność w wartościowej skale, co podnosi koszty operacyjne oraz zużycie energii. Inteligentne koparki pozwalają tego uniknąć. Poza tym dane dzięki nim gromadzone można wykorzystać do mapowania złóż ze znacznie większą dokładnością. To pozwala lepiej planować eksploatację kopalni, w tym roboty strzałowe.
Jak zapewnić skuteczną wentylację?
Sensory są również wykorzystywane poza specjalistycznym sprzętem górniczym, głównie do monitorowania warunków w kopalniach. W tych podziemnych przykładowo występuję gazy jak tlenki azotu, dwutlenek i tlenek węgla, których źródłem są roboty strzałowe oraz silniki spalinowe maszyn górniczych, jak też naturalnie występujące metan oraz radon. Ponieważ są szkodliwe dla pracowników, aby zapewnić im bezpieczne środowisko pracy, wymagana jest efektywna wentylacja, dostarczająca czyste powietrze w strefach przebywania ludzi. Skuteczność cyrkulacji i wymiany zanieczyszczonego powietrza zależy od jego ciśnienia i przepływu. Te wielkości są w związku z tym jednymi z częściej mierzonych. Korzysta się w tym celu z różnych sensorów.
Przykład to anemometry łopatkowe. Przepływ powietrza w tym przypadku jest obliczany na podstawie pomiaru prędkości obrotów łopatki, którą w ruch wprawia powietrze przepływające przez przyrząd. Zakres pomiaru anemometrów łopatkowych typowo wynosi 1 – 15 m/s. Wartości spoza są za niskie, żeby uzyskać dokładny odczyt lub zbyt duże, przez co pęd powietrza może uszkodzić czujnik. Przepływ w tunelu nie jest równomierny, zatem aby wynik był wiarygodny odczyty z anemometrów rozmieszczonych w kilku punktach, trzeba uśrednić. Kolejny przykład to rurka Pitota. Przyrząd taki mierzy różnicę statycznego i dynamicznego ciśnienia medium, które przez niego płynie. Na tej podstawie, wykorzystując prawo Bernoullego, można obliczyć przepływ. W kopalniach montuje się poza tym przepływomierze ultradźwiękowe. Wyróżnia je szybkość i precyzja pomiaru. Są też w stanie mierzyć bardzo mały przepływ, jak i wykryć jego brak.
Obudowy w wykonaniu przeciwwybuchowym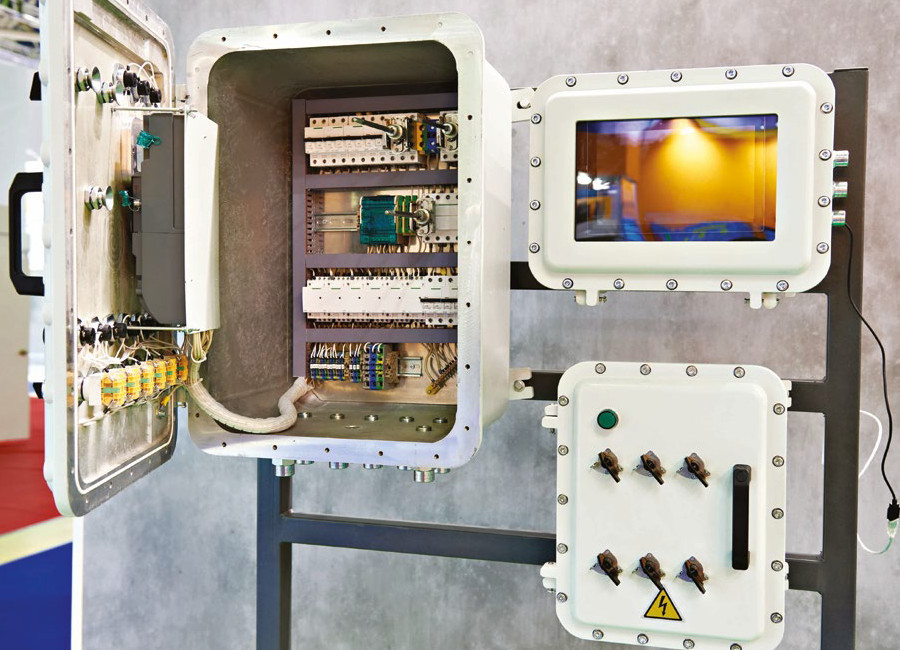
Podstawowym zabezpieczeniem urządzeń elektrycznych i mechanicznych są obudowy. W strefach zagrożonych wybuchem wolno korzystać tylko z tych spełniających wymagania dyrektywy ATEX. Przystosowując sprzęt elektryczny oraz nieelektryczny do pracy w takich warunkach, trzeba przede wszystkim zapobiec zapłonowi atmosfery wybuchowej, którego mógłby on być źródłem. Oznacza to, że nie można dopuścić do wystąpienia iskrzenia, na przykład na skutek tarcia, uderzenia lub w wyniku wyładowania elektrostatycznego. Warunkiem jest też to, aby części, które mają kontakt z mieszaniną wybuchową, nie osiągały temperatury jej zapłonu. Zalecenia projektowe na ten temat zostały zamieszczone w normach z serii PN- EN 60079 zharmonizowanych z dyrektywą ATEX. Wyróżniono w nich cztery przypadki, w których środki ochronne nie pozwalają na zaistnienie niebezpiecznej sytuacji. W pierwszym przedostanie się mieszaniny wybuchowej do sprzętu, w którym może znajdować się źródło zapłonu i to, że do niego dojdzie, jest dopuszczalne, jednak wyklucza się przeniknięcie ognia do otoczenia. Przykładowe typy zabezpieczeń spełniające ten wymóg to: obudowy ognioszczelne (Ex d według PN-EN 60079-1) oraz osłony piaskowe (Ex q, PN-EN 60079-5). Ochrona w postaci obudowy gazowej z nadciśnieniem (Ex p, PN-EN 60079-2), przez zanurzenie w cieczy (Ex o, PN-EN 60079-6) lub hermetyzację (Ex m, PN-EN 60079-18), to natomiast przykłady zabezpieczeń zapobiegających wnikaniu mieszaniny wybuchowej i/albo jej zetknięciu z wewnętrznymi wynikającymi z funkcji urządzenia potencjalnymi źródłami zapłonu. Zabezpieczenie urządzeń za pomocą budowy wzmocnionej (Ex e, PN-EN 60079-7) gwarantuje zaś, że nawet jeśli mieszanina wybuchowa przedostanie się do obudowy działającego sprzętu, to się nie zapali. Iskrzenie ani podwyższone temperatury nie wystąpią również w urządzeniach iskrobezpiecznych (Ex i, PN-EN 60079-11). |
Predykcja i cyfrowe bliźniaki w kopalniach
W miarę jak ceny czujników spadają, a możliwości transmisji wyników pomiarów i ich obróbki, dzięki Internetowi Rzeczy i m.in. postępowi w zakresie algorytmów sztucznej inteligencji, rosną, przybywa sensorów wbudowanych w maszyny. Dostarczają one komplet odczytów parametrów pracy oraz stanu urządzeń, które wcześniej były mierzone ręcznie. Dzięki temu możliwe staje się wdrożenie modelu predykcyjnego w konserwacji. Upowszechniania się on również w kopalniach, które w coraz większym stopniu są mechanizowane i automatyzowane, dlatego każde nieplanowane wstrzymanie produkcji powoduje straty. Dzięki predykcji w utrzymaniu ruchu można na bieżąco monitorować i analizować stan sprzętu ciężkiego oraz floty transportowej kopalni, reagując na wczesne symptomy awarii. Jest to alternatywą dla podejścia, w którym konserwacje sprzętu przeprowadza się "na zaś", bez wyraźnych do tego wskazań, jak i tego, w którym czeka się, aż urządzenie się zepsuje.
Dostępność rosnącej ilości danych pomiarowych pozwala na ich wykorzystanie, w połączeniu z nowymi technologiami z zakresu symulacji 3D, a ostatnio też sztucznej inteligencji, również w dziedzinie modelowania, do tworzenia wirtualnych kopii rzeczywistych zasobów – cyfrowych bliźniaków. Są to modele komputerowe procesów lub obiektów opracowane w oparciu o dane różnego typu, bieżące i archiwalne. Odwzorowując ich przebieg i stan, pozwalają na symulację działania w zależności od różnych scenariuszy zmian czynników mających wpływ na kluczowe wskaźniki, jak przepustowość czy efektywność energetyczna. W kopalniach wykorzystuje się je coraz częściej do analizowania możliwości ulepszeń na poszczególnych etapach wydobycia, m.in. w zakresie robót strzałowych. Symulacje tego kroku mogą m.in. pozwolić na dobranie optymalnych parametrów odwiertów (lokalizacji, odległości między otworami, ich szerokości i głębokości) oraz ładunków wybuchowych (gęstości, ilości, rodzaju) tak, żeby uzyskać zakładaną szybkość kopania i przepustowość kruszenia w oparciu o dane: geologiczne, archiwalne dotyczące efektów eksplozji (stopnia fragmentacji urobku), o wydajności wydobycia, osiągach koparki oraz kruszarki.
Przykłady konstrukcji obudów w wykonaniu przeciwwybuchowym
Obudowy ognioszczelne, osłaniające części mogące zapalić atmosferę wybuchową znajdującą się wewnątrz, muszą być w stanie wytrzymać ciśnienie eksplozji. Dzięki temu nie dopuszcza się do rozprzestrzenienia się eksplozji do otaczającej obudowę atmosfery wybuchowej. By ten wymóg spełnić, wykorzystuje się materiały o odpowiedniej wytrzymałości mechanicznej. Oprócz tego wszelkie odstępy pomiędzy częściami obudowy powinny być na tyle wąskie i długie, żeby wypływający nimi gorący gaz ostygł i nie mógł już spowodować zapłonu mieszaniny wybuchowej, kiedy wydostanie się na zewnątrz. W obudowach w wersji ognioszczelnej wykonywane są urządzenia, w których podczas normalnej pracy powstają iskry, łuki elektryczne i/albo gorące powierzchnie, jak na przykład: rozdzielnice, bezpieczniki, oprawy oświetleniowe, hamulce cierne, silniki elektryczne. W obudowach gazowych z nadciśnieniem wnikaniu otaczającej atmosfery wybuchowej do środka zapobiega się przez utrzymanie wewnątrz niej gazu ochronnego, którym może być czyste, suche powietrze, gaz obojętny albo inny odpowiedni w danym przypadku, pod ciśnieniem wyższym od ciśnienia atmosferycznego. Nadciśnienie jest utrzymywane z ciągłą wymianą gazu ochronnego lub bez. Obudowa musi zachować integralność przy kilkukrotności nadciśnienia występującego podczas normalnej pracy. W razie spadku ciśnienia gazu ochronnego urządzenie powinno zostać automatycznie wyłączone. |
Komunikacja 5G pod ziemią
Bezpieczniejsze i wydajniejsze kopalnie wymagają sprawnej komunikacji. Duże nadzieje w tym zakresie pokładane są w technologii 5G. Ze względu na dużą przepustowość i małe opóźnienia sieci piątej generacji w górnictwie, podobnie jak w wielu innych dziedzinach, mają potencjał, by umożliwić wdrożenie rozwiązań wcześniej nieosiągalnych, wykraczających poza "zwykły" dostęp do Internetu. Chodzi głównie o możliwość dwukierunkowej transmisji danych w czasie rzeczywistym, dzięki czemu na różne sposoby będzie można poprawić wydajność wydobycia przez jeszcze większą automatyzację, jak również zwiększyć bezpieczeństwo personelu. Parametry transmisji zapewniają sieciom 5G pod tym względem przewagę nad sieciami starszych generacji, pozwalając na przykład na transmisję wideo dużej rozdzielczości z rejonów, w których przebywanie górników wiąże się z dużym zagrożeniem czy przesyłanie do zautomatyzowanych maszyn tam pracujących sygnałów sterujących.
Zanim jednak sieci 5G upowszechnią się w kopalniach, trzeba jeszcze rozwiązać kilka problemów. Takim jest często odległa i trudnodostepna lokalizacja kopalni, która utrudnia poprowadzenie kablowego połączenia światłowodowego od infrastruktury sieci prywatnej do stacji bazowej 5G. Alternatywą w takich przypadkach może być skorzystanie z satelitów komunikacyjnych, o ile opóźnienia z tym związane będą w danym przypadku akceptowalne. Dodatkową tego zaletą jest mniejszy koszt, dzięki uniknięciu wydatków na infrastrukturę sieciową. Kolejnym wyzwaniem jest uzyskanie sygnału dobrej jakości pod ziemią. W tym zakresie prowadzone są już badania, w ramach których opracowuje oraz testuje się projekty sieci i sprzęt dostosowany do warunków podziemnych.
Case study – Pożary mobilnych jednostek produkcji materiałów wybuchowychMobilne jednostki mieszania, odmierzania oraz dozowania materiałów wybuchowych na miejscu (Mobile Manufacturing Unit, MMU) poza tym, że znacząco usprawniają roboty strzałowe, mogą stanowić poważne zagrożenie dla bezpieczeństwa ich obsługi, pracowników kopalni i osób postronnych. Niebezpieczne są zwłaszcza pożary ciężarówek MMU. Do dwóch takich sytuacji doszło w pewnej kopalni w Australii. W obu przypadkach pożar był spowodowany przez kontakt chemikaliów z powierzchniami, które rozgrzały się do wysokiej temperatury. 
Pierwsza groźna sytuacja wydarzyła się, kiedy pojazd MMU wrócił pusty z wyrobiska do miejsca załadunku materiałów wybuchowych. Kierowca, po opuszczeniu kabiny, wyczuł spaleniznę. Natychmiast sprawdził stan samochodu i zauważył ogień wydobywający się z okolicy katalizatora – płomienie miały już wówczas wysokość ponad 10 centymetrów. Kierowca wsiadł do pojazdu i odjechał na bezpieczną odległość od miejsca, w którym składowane są ładunki wybuchowe i tam ugasił pożar ręczną gaśnicą. Jak wykazało późniejsze dochodzenie, przyczyną było kapanie resztek chemikaliów wybuchowych z węża doprowadzającego na obudowę katalizatora. Przez dłuższy czas przez nikogo niezauważony wyciek skutkował nagromadzeniem się substancji łatwopalnej, która dodatkowo została zanieczyszczona innymi tego typu, jak olej. Gdy temperatura obudowy katalizatora przekroczyła temperaturę zapłonu tej mieszanki, wybuchł pożar. Drugi pożar również został zauważony na placu załadunku materiałów wybuchowych – podczas mycia ciężarówki MMU kierowca wyczuł spaleniznę i po oględzinach pojazdu zauważył płomień za skrzynką akumulatorów. Okazało się, że jego przyczyną było dodatkowe złącze, domontowane w celu podłączenia akumulatora do rozrusznika, którego uszkodzone zaciski spowodowały zwarcie i iskrzenie. Od tego zapaliła się izolacja kabla. Okoliczności obu pożarów dostarczyły cennych wskazówek, jak poprawić bezpieczeństwo ciężarówek MMU. Przede wszystkim większą uwagę należy zwrócić na poprawny projekt i wykonanie ich instalacji elektrycznej, eliminując zbędne połączenia zwiększające ryzyko zwarć i sprawdzać stan zacisków złączy. Ocena ryzyka pożaru powinna uwzględniać wszystkie potencjalnie silnie nagrzewające się powierzchnie, które mogą mieć kontakt z chemikaliami wybuchowymi, w tym na skutek ich wycieku. Te na to narażone powinno się wyposażyć w osłony. Sprawdzić trzeba także komponenty wyposażenia jak węże, z których materiały wybuchowe mogą wyciekać i te jak okładziny, w które mogą wsiąkać albo w inny sposób się nagromadzać. Należy ponadto zaostrzyć wymogi utrzymania czystości tego typu ciężarówek. |
Roboty w kopalniach

Ze względu na specyfikę pracy w kopalniach, podziemnych i odkrywkowych, dąży się do ograniczania obecności ludzi w szczególnie niebezpiecznych rejonach tych zakładów. W tym celu m.in. wykorzystuje się w nich roboty. Są one jak na razie głównie wykorzystywane w zadaniach nietypowych jak eksploracja zamkniętych kopalni. Wiele z nich jest bowiem coraz częściej poddawanych ponownej ocenie pod kątem występowania w nich złóż kopalin rzadkich, które dawniej uważano za niewartościowe, a które obecnie są niezbędne na przykład w produkcji elektronicznej, jak pierwiastki ziem rzadkich. Badania pod tym kątem są prowadzone zwłaszcza w Unii Europejskiej, która w związku z problemami z dostępnością do surowców o krytycznym znaczeniu dla branż strategicznych zamierza uniezależnić się od ich niepewnych zewnętrznych źródeł.
W Europie jest nawet kilka tysięcy opuszczonych kopalń, obecnie zazwyczaj zalanych, które wymagają sprawdzenia. Wysłanie tam ludzi, by penetrowali zatopione, wąskie korytarze, poruszając się w mętnej wodzie i w ciemnościach, wiązałoby się, poza kosztami, z narażeniem nurków na ogromne niebezpieczeństwo. Zaprojektowania robotów do tego zadania również nie jest jednak łatwe. Główne wyzwanie to opracowanie konstrukcji umożliwiającej poruszanie się w ciasnej przestrzeni przy ograniczonej widoczności, a więc o odpowiednio małych rozmiarach, w której należy jednak zmieścić dużą liczbę wyposażenia, w tym napęd, systemy nawigacyjne i komputer pokładowy, urządzenia pobierające próbki i rejestrujące dane geologiczne i przestrzenne.
Pracuje się też na rozwiązaniami, które mają poprawić bezpieczeństwo górników dzięki łącznemu wykorzystaniu Internetu Rzeczy i robotów. Przykładem jest detekcja oraz sprawdzanie wycieków toksycznych substancji. W tym celu tworzy się sieci IoT czujników, które monitorują środowisko kopalni i zapewniają wczesne ostrzeganie o zagrożeniu, co pozwala na czas ewakuować górników. Wówczas w niebezpieczny rejon wysyła się roboty, by zbadały wyciek. Wyzwaniem w tworzeniu i utrzymaniu infrastruktury Internetu Rzeczy w kopalniach jest to, że inaczej niż w fabryce, gdzie maszyny, stanowiska robocze i linie produkcyjne mają określoną lokalizację, środowisko pracy pod ziemią ciągle się zmienia, a przestrzeń jest nieregularna i zamknięta. Pracuje się również nad cobotami, które współpracując z ludźmi będą wysyłane jako pierwsze do zbadania otoczenia pod kątem występujących w nim zagrożeń (na przykład osunięć skał), zanim na dane stanowisko wejdą górnicy.
Case study – Kopalnie autonomiczneRio Tinto jest pierwszą firmą, która zrealizowała całkiem zautomatyzowane wiercenie otworów bez interwencji człowieka. Cel ten osiągnięto w ramach systemu ADS (Autonomous Drill System), który pozwala operatorowi korzystającemu z pulpitu sterowniczego w zdalnej lokalizacji nadzorować kilka autonomicznych wiertnic różnych producentów jednocześnie. Ponadto w australijskich kopalniach Rio Tinto pracują autonomiczne, bezzałogowe ciężarówki (Autonomous Haulage System). Wyposażono je w liczne czujniki (m.in. radarowe i laserowe). Wyniki pomiarów są wykorzystywane przez program sztucznej inteligencji, dzięki któremu pojazdy uczą się topografii terenu kopalni. Trasy wywrotek, śledzone dzięki zamontowaniu w nich odbiorników GPS, są także poddawane analizie w centrum sterowania. Pozwala to koordynować ich przemieszczanie się i optymalizować przyszłe ścieżki i parametry ruchu (prędkość). Ponadto ciężarówki wyposażono w autonomiczny system detekcji kolizji. Na podstawie danych z licznych czujników, gdy na drodze pojawi się przeszkoda, automatycznie modyfikuje on zadaną trasę pojazdu. Sensory monitorują również stan wywrotki, m.in. ciśnienie w oponach, temperaturę płynów chłodzących, ich ciśnienie, poziom i stopień czystości, temperaturę oraz poziom wibracji łożysk, temperaturę i ciśnienie w układzie hamulcowym. Dzięki temu zamiast angażować personel do wykonywania okresowych przeglądów floty, można przewidywać problemy eksploatacyjne i na bieżąco na nie reagować. W zakładach górniczych Rio Tinto uruchomiono również autonomiczne pociągi. Długodystansowa sieć kolejowa o dużym zasięgu działa w następujący sposób: po wprowadzeniu przez kontrolera, który znajduje się w centrum operacyjnym, informacji o trasie przejazdu i uruchomieniu przez niego systemu, komputery pokładowe składu oraz komputery w centrum sterowania przejmują kontrolę i podejmują wszystkie dalsze decyzje odnośnie do sterowania pojazdem samodzielnie. Odpowiadają one m.in. za to, aby pociąg nie przekraczał limitów prędkości, nie zderzył się z innymi składami i przejeżdżał tylko przez puste przejazdy kolejowe. Również jeżeli wykryją awarię jakiegokolwiek podzespołu pojazdu, muszą go bezpiecznie zatrzymać. |
Kopalnie autonomiczne
Wszystkie innowacje opisane powyżej zbliżają kopalnie do celu, którym jest ich w pełni autonomiczna praca. Podejmowane są już pierwsze próby w tym zakresie. Sztandarowy przykład to projekt realizowany w kopalniach rudy żelaza w regionie Pilbara w Australii Zachodniej przez firmę Rio Tinto. Sukcesywnie wdraża ona w swoich zakładach górniczych rozwiązania autonomiczne. Jak do tej pory skupiano się w tym zakresie na dwóch segmentach działalności kopalń: wierceniu i transporcie urobku (patrz: ramka).
Monika Jaworowska














