
Jeżeli chodzi o pierwsze z wymienionych, stale na znaczeniu zyskują siłowniki elektryczne. Są to urządzenia, które przekształcają ruch obrotowy silnika w ruch w linii prostej. Są w związku z tym używane w różnego rodzaju zadaniach pchania i ciągnięcia, na przykład podnoszeniu, upuszczaniu, przesuwaniu przedmiotów. Siłowniki elektryczne popularyzują się przede wszystkim ze względu na swoje zalety w porównaniu z konkurencyjnymi rozwiązaniami, którymi są siłowniki pneumatyczne i hydrauliczne.
Siłowniki elektryczne a pneumatyczne i hydrauliczne
W pierwszych na energię mechaniczną obiektu, który zostaje wprawiony w ruch, przekształcana jest energia potencjalna sprężonego gazu, przeważnie powietrza. Urządzenie tego typu składa się z tłoka umieszczonego w cylindrze, który wypełnia się sprężonym powietrzem. Pod wpływem gazu tłok się przesuwa, a następnie powraca do położenia wyjściowego. W siłownikach jednostronnych to drugie następuje pod naciskiem będącej ich częścią sprężyny, której jeden koniec połączony jest z tłokiem, a drugi ze ścianą cylindra. Tłok może też wracać do położenia wyjściowego pod wpływem ciężaru ładunku. W urządzeniach dwustronnych powrót tłoka wywołuje działanie sprężonego powietrza doprowadzonego z przeciwnej strony. W siłownikach drugiego typu medium roboczym jest natomiast ciecz hydrauliczna pod ciśnieniem.
W zestawieniu z hydraulicznymi i pneumatycznymi siłowniki elektryczne wyróżniają się: prostszą i kompaktową konstrukcją (bez pomp, zaworów, węży, zbiorników mediów), łatwiejszą instalacją, prostszym sterowaniem i jego większą precyzją (dla porównania w pneumatycznych przez dużą ściśliwość sprężonego powietrza trudno jest zapewnić wolny, a jednocześnie płynny ruch tłoka), cichą i czystą pracą (wycieki cieczy hydraulicznej, która nie jest neutralnym medium, mogą dla otoczenia okazać się groźne), łatwiejszą i tańszą konserwacją i eksploatacją (nieszczelności w przewodach, którymi transportowane jest sprężone powietrze zwiększają koszty użytkowania), większą efektywnością energetyczną (w siłownikach pneumatycznych i hydraulicznych trzeba się liczyć ze stratami energii powstającymi podczas przetłaczania gazu i cieczy).
Budowa siłowników elektrycznych
Główne komponenty siłownika elektrycznego to: silnik elektryczny, przekładnia, śruba napędowa, nakrętka napędowa, tłoczysko. Oprócz tego wyposaża się je w różne dodatkowe elementy, przede wszystkim łożyska, czujniki i elementy je aktywujące. Łożyska stanowią podporę śruby. Montuje się je z przodu i na przeciwnym końcu, od strony napędu. Jeśli chodzi o śruby, najpopularniejsze są trzy typy: kulowe, trapezowe, wałeczkowe. Pierwsze cechuje precyzja, małe tarcie oraz opory toczenia, duża sztywność, wytrzymałość na obciążenia, spokojny bieg, mały luz osiowy, wymóg małego momentu napędowego, żywotność, nawet przy dużych prędkościach i przyspieszeniach. Śruby trapezowe są tanie i wytrzymują duże obciążenia, dynamiczne oraz statyczne. Cechuje je samohamowność, odporność na wibracje, cicha praca. Śruby trzeciego typu natomiast wyróżnia większa nośność i dłuższa żywotność w porównaniu do kulowych. Sprawdzają się w przypadku dużych prędkości i przyspieszeń. Ich zalety to oprócz tego duża sztywność i precyzja.
Konserwację śrub ułatwia wbudowane gniazdo smarowania. Korpus wykonuje się zazwyczaj z tłoczonego profilu. Konstrukcja taka zmniejsza liczbę zagłębień, w których mogłyby się zbierać zanieczyszczenia. Ewentualnie w korpusie wykonuje się rowki dla sensorów, które przed brudem chronią osłony. W przykładowym wykonaniu czujniki te mogą być wzbudzane przez magnesy trwałe wbudowane w nakrętce śruby. Oprócz tego tłoczysko zabezpiecza się przed obracaniem umieszczając je w tulei.
Siłowniki beztłoczyskowe i serwosiłowniki

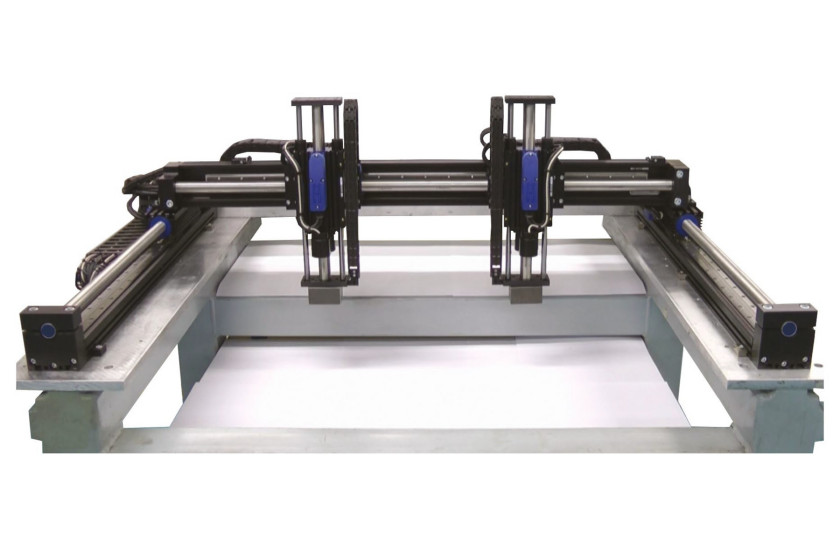
Zasada działania siłowników elektrycznych jest następująca: silnik elektryczny za pośrednictwem przekładni wprawia w ruch obrotowy śrubę, po której przesuwa się nakrętka napędu, poruszając przymocowanym do niej tłoczyskiem. Są one także oferowane w wykonaniu beztłoczyskowym.
W takim siłowniku obciążenie jest poruszane przez ruchomy wózek (suwak, karetkę), który jest sprzężony z tłokiem, magnetycznie albo mechanicznie. W konstrukcji beztłoczyskowej uzyskuje się większe przemieszczenia niż w tej z tłoczyskiem dzięki niewystępowaniu wyboczenia tego elementu. Dlatego tego typu siłowniki mają większy skok. Ich zaletą jest też zwarta budowa.
Poza wersjami podstawowymi siłowniki dostępne są również w różnych wykonaniach, w tym też w tych specjalnych. Przykładem są te urządzenia w wersji zintegrowanej lub z oddzielnym silnikiem. W drugich, "tradycyjnych", siłownik jest podłączony do zewnętrznego silnika za pośrednictwem układu przeniesienia napędu, na przykład przekładni z paskiem zębatym. Siłowniki pierwszego rodzaju są zintegrowane z serwosilnikiem (serwosiłowniki). Ich zaletą jest kompaktowość w porównaniu z drugą konfiguracją, w przypadku której silnik zamontowany równolegle z siłownikiem lub połączony z nim w linii zajmuje więcej miejsca odpowiednio w pionie lub w poziomie. Serwosiłowniki mają też mniej potencjalnych punktów, którymi mogą wnikać zanieczyszczenia. W porównaniu do tych z zewnętrznym silnikiem mają jednak przeważnie krótszy skok. Z drugiej strony na ich niezawodność i sprawność energetyczną pozytywnie wpływa mniejsza liczba komponentów.
Siłowniki elektryczne w wersjach specjalnych
Wersje specjalne to m.in. siłowniki do zastosowań stawiających wysokie wymagania higieniczne. Urządzenie takie nie może być źródłem ani nie może się przyczyniać do gromadzenia zabrudzeń czy rozwoju drobnoustrojów. Przykładowe rozwiązania konstrukcyjne stosowane w siłownikach, które mają temu zapobiec, to: materiały wykonania odporne na korozję, która może się rozwinąć pod wpływem oddziaływania środków myjących i odkażających (stal nierdzewna), zapewnienie wysokiego stopnia szczelności obudów dzięki uszczelnieniom z trwałych materiałów, gładkość wykończenia powierzchni, zaokrąglone krawędzie, wypukłości i pochyłości, które sprzyjają spływaniu wody, brak płaskich powierzchni, gdzie mogłaby się gromadzić, brak otworów montażowych i do prowadzenia kabli, zastąpienie śrub imbusowych sześciokątnymi, brak trudnych do czyszczenia wgłębień.












